一种自触发的手动操作气缸夹紧气路的制作方法
1.本发明涉及气动控制技术领域,特别涉及一种自触发的手动操作气缸夹紧气路。
背景技术:
2.汽车白车身焊装夹具的焊装工序中,由于产品本身结构及定位要求,需要焊装治具在焊接前手动将夹具压臂摆下,然后启动夹具,通过气缸进气施加压力将压臂夹紧,焊接完成后,此时又需要气控将气缸自动打开。这样就要求夹具压臂在作业前是手动操作,作业中持续气动施压夹紧,作业后气动自动打开。
3.如果直接采用气控,需人工重复操作启动按钮,容易导致设备误操作,工作效率低下。并且直接气控动作压臂摆下常常会损坏产品及夹具本身。所以遇到这种情况时,需要采用一种气路将这种提前定位的夹具单元上用的气缸进行泄气处理,由人工操作把压臂放置到位。然后再启动整个夹具,手动夹紧单元和其他夹紧单元一起进气压紧产品。
技术实现要素:
4.本发明旨在至少在一定程度上解决现有技术中的上述技术问题之一。为此,本发明实施例提供一种自触发的手动操作气缸夹紧气路,能够实现气缸自触发进行泄气。
5.根据本发明实施例的自触发的手动操作气缸夹紧气路,包括压臂单元,所述压臂单元包括具有第一通气口和第二通气口的气缸、由所述气缸控制的压臂、以及通过所述压臂触发的机控阀;阀控组件,所述阀控组件包括阀岛汇流板、二位多通阀ⅰ以及二位多通阀ⅱ,阀岛汇流板设置有进气路和排气路,所述二位多通阀ⅰ具有与所述进气路连通的p1进气口、与所述第一通气口连通的r1排气口以及与所述排气路连接的a1出气口,所述二位多通阀ⅱ具有与所述进气路连通的p2进气口、与所述第二通气口的a2出气口以及与所述排气路连接的r3排气口,所述二位多通阀ⅰ具有左位连接状态和右位连接状态两种执行位置,所述二位多通阀ⅰ处于左位连接状态时,a1出气口连通p1进气口,处于右位连接状态时,a1出气口连通r1排气口;二位多通阀ⅱ具有左位连接状态和右位连接状态两种执行位置,所述二位多通阀ⅱ处于左位连接状态时,a2出气口连通p2进气口,处于右位连接状态时,a2出气口连通r3排气口;以及气源,所述气源出口分别连接有主气路以及阀控气路组,所述主气路连通所述进气路,所述阀控气路组用于控制所述二位多通阀ⅰ的执行位置以及控制所述二位多通阀ⅱ的执行位置,所述机控阀设置于所述阀控气路中。
6.在可选或优选的实施例中,所述阀控气路组包括均与所述气源出口连接的所述第一阀控气路、第二阀控气路以及第三阀控气路,所述第一阀控气路另一端连接所述二位多通阀ⅱ右位以推动所述二位多通阀ⅱ向左位连接状态位置移动,所述机控阀设置于所述第一阀控气路中。
7.在可选或优选的实施例中,通过所述气缸的活塞杆伸出以驱动所述压臂打开,从而使所述压臂压触所述机控阀,以使所述第一阀控气路连通。
8.在可选或优选的实施例中,所述第二阀控气路另一端连接所述二位多通阀ⅰ的左
位,以推动所述二位多通阀ⅰ向右位连接状态位置移动。
9.在可选或优选的实施例中,所述第二阀控气路安装有第一按压阀。
10.在可选或优选的实施例中,所述第三阀控气路另一端连接所述二位多通阀ⅰ的右位所述二位多通阀ⅱ左位,以推动所述二位多通阀ⅰ向左位连接状态位置移动。
11.在可选或优选的实施例中,所述第三阀控气路还连接所述二位多通阀ⅱ左位,以推动所述二位多通阀ⅱ向右位连接状态位置移动。
12.在可选或优选的实施例中,所述第三阀控气路安装有第二按压阀。
13.在可选或优选的实施例中,所述排气路末端连接有消音器。
14.在可选或优选的实施例中,所述气源出口设置有三联体。
15.基于上述技术方案,本发明实施例至少具有以下有益效果:上述技术方案,通过设计阀控组件来控制与气缸的连接状态,设计阀控气路组来控制阀控组件的执行位置,气缸从夹紧状态到打开状态时,压臂打开触发机控阀的开启,连同阀控气路组一起控制二位多通阀ⅰ和二位多通阀ⅱ的执行位置,触发机控阀后,使二位多通阀ⅰ处于右位连接状态,a1出气口连通r1排气口,使二位多通阀ⅱ处于右位连接状态,a2出气口连通r3排气口,此时,气缸的第一通气口和第二通气口均得到泄气,此时可自由操作压臂。
附图说明
16.下面结合附图和实施例对本发明进一步地说明;
17.图1是本发明实施例中压臂单元的透视图一,其中,压臂处于夹紧状态;
18.图2是本发明实施例中压臂单元的透视图二,其中,压臂处于打开状态;
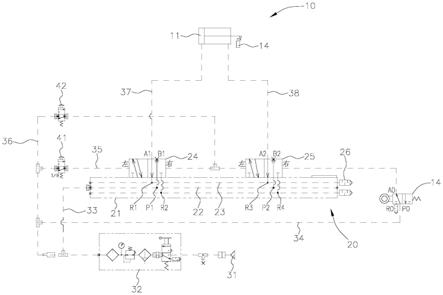
19.图3是本发明实施例中的气路连接示意图一;
20.图4是本发明实施例中的气路连接示意图二,其中,出示的是作业初始状态;
21.图5是本发明实施例中的气路连接示意图三,其中,出示的是压臂压紧作业状态;
22.图6是本发明实施例中的气路连接示意图四,其中,出示的是气缸泄气状态。
具体实施方式
23.本部分将详细描述本发明的具体实施例,本发明之较佳实施例在附图中示出,附图的作用在于用图形补充说明书文字部分的描述,使人能够直观地、形象地理解本发明的每个技术特征和整体技术方案,但其不能理解为对本发明保护范围的限制。
24.在本发明的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
25.在本发明的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
26.本发明的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体
含义。
27.参照图1至图3,一种自触发的手动操作气缸夹紧气路,包括压臂单元10、阀控组件20以及气源31。
28.其中,如图1和图2所示,压臂单元10包括具有第一通气口和第二通气口的气缸11、由气缸11控制的压臂12、以及通过压臂12触发的机控阀14。可以理解的是,参照图1,气缸11的活塞杆伸出,推动压臂12绕安装架15转动,此时,压臂12处于夹紧状态,用于压紧产品,具体压紧产品部分的结构为现有技术,此不再赘述。参照图2,气缸11的活塞杆回缩时,拉动压臂12绕安装架15转动,此时,压臂12处于打开状态,气缸11的活塞杆安装有触碰块13,触碰块13压触机控阀14,使机控阀14打开,机控阀14可选用滚轮式机械阀。
29.参照图3,阀控组件20包括阀岛汇流板21、二位多通阀ⅰ24以及二位多通阀ⅱ25,阀岛汇流板21设置有进气路22和排气路23。具体的,二位多通阀ⅰ24具有与进气路22连通的p1进气口、与第一通气口连通的r1排气口以及与排气路23连接的a1出气口,二位多通阀ⅱ25具有与进气路22连通的p2进气口、与第二通气口的a2出气口以及与排气路23连接的r3排气口。本实施例中,二位多通阀ⅰ24和二位多通阀ⅱ25,均选用二位五通阀,其中,二位多通阀ⅰ24的b1出气口和二位多通阀ⅱ25的b2出气口均不接通管路,二位多通阀ⅰ24的r2排气口和二位多通阀ⅱ25的r4排气口在本实施例亦不工作。需要说明的是,二位五通阀是较为常见的阀体,可以实现阀控组件20的连接,本领域技术人员还可以采用其它多位多通阀进行替换。
30.可参照图3至图6,二位多通阀ⅰ24具有左位连接状态和右位连接状态两种执行位置,二位多通阀ⅰ24处于左位连接状态时,a1出气口连通p1进气口,处于右位连接状态时,a1出气口连通r1排气口;二位多通阀ⅱ25具有左位连接状态和右位连接状态两种执行位置,二位多通阀ⅱ25处于左位连接状态时,a2出气口连通p2进气口,处于右位连接状态时,a2出气口连通r3排气口。另外,左位、右位的位置说明仅仅是相对附图所示,并不能理解为对本技术的保护范围的限制。
31.气源31出口分别连接有主气路33以及阀控气路组,主气路33连通进气路22,阀控气路组用于控制二位多通阀ⅰ24的执行位置以及控制二位多通阀ⅱ25的执行位置,机控阀14设置于阀控气路中。
32.上述技术方案,通过设计阀控组件20来控制与气缸11的连接状态,设计阀控气路组来控制阀控组件20的执行位置,气缸11从夹紧状态到打开状态时,压臂12打开后,触碰块13压触机控阀14,开启机控阀14,连同阀控气路组一起控制二位多通阀ⅰ24和二位多通阀ⅱ25的执行位置,使二位多通阀ⅰ24处于右位连接状态,a1出气口连通r1排气口,使二位多通阀ⅱ25处于右位连接状态时,a2出气口连通r3排气口,此时,气缸11的第一通气口和第二通气口均得到泄气,此时可自由操作压臂,此时,如图4所示。
33.以下具体说明阀控气路组的具体原理:
34.进一步的,阀控气路组包括均与气源31出口连接的第一阀控气路34、第二阀控气路35以及第三阀控气路36,第一阀控气路34另一端连接二位多通阀ⅱ25右位以推动二位多通阀ⅱ25向左位连接状态位置移动,机控阀14设置于第一阀控气路34中。通过气缸11的活塞杆伸出以驱动压臂12打开,从而使压臂12压触机控阀14,以使第一阀控气路34连通。
35.另外,第二阀控气路35另一端连接二位多通阀ⅰ24的左位,以推动二位多通阀ⅰ24
向右位连接状态位置移动,第二阀控气路35安装有第一按压阀41。第三阀控气路36另一端连接二位多通阀ⅰ24的右位二位多通阀ⅱ25左位,以推动二位多通阀ⅰ24向左位连接状态位置移动;第三阀控气路36还连接二位多通阀ⅱ25左位,以推动二位多通阀ⅱ25向右位连接状态位置移动。第三阀控气路36安装有第二按压阀42。
36.参照图4,为作业初始状态,压臂单元状态如图2所示,此时,压臂12可手动操作,需要说明的是,机控阀14在压臂单元10表示的位置关系,在第一阀控气路34中表示的气路逻辑的连接关系,为同一构件。具体的,二位多通阀ⅱ25处于右位连接状态,a2出气口连通r3排气口,气缸11内活塞前的气体通过r3排气口向排气路23排空;二位多通阀ⅰ24处于右位连接状态,a1出气口连通r1排气口,气缸11内活塞后的气体通过r1排气口向排气路23排空。优选的,排气路23末端连接有消音器26。此时气缸11活塞前后气体均排空与大气联通,活塞处于自由活动状态,作业员可手动操作压臂12。本实施例中,采用粗实线表示气路连通状态。
37.参照图5,压臂压紧作业状态,手动操作压臂12压下后,触碰块13随气缸11浩如烟海活塞杆移动,机控阀14被松开,压臂单元10呈现图1状态。第一阀控气路通过机控阀14排空,具体的,机控阀14具有r0排气口、p0进气口、a0出气口,此时,a0出气口与r0r0排气口连通,r0排气口连接有消音器。二位多通阀ⅱ25保持a2出气口与r3排气口连通,气缸11活塞前气路保持与大气联通。作业员按下第一按压阀41,第二阀控气路35连通,作用于二位多通阀ⅰ24,使其处于左位连接状态,p1进气口与a1出气口连通,气体进入气缸11活塞后空间,使气缸11伸出保持压紧力,此时压臂12夹紧。压臂单元10夹紧后,可进行焊接作业。
38.参照图6,出示的是气缸泄气状态。第一按压阀41断开状态,按下第二按压阀42,气体通过第三阀控气路36同时作用于二位多通阀ⅰ24和二位多通阀ⅱ25,使二位多通阀ⅰ24变为右位连接状态,a1出气口与r1排气口连通,使气缸11活塞后气体与消音器26连通泄气;使二位多通阀ⅱ25变为左位连接状态,a2出气口与p2进气口联通,主气源作用于气缸11活塞前端,气动将气缸11打开。
39.在气缸11完全打开后,触碰块13触碰机控阀14,使气路变更为图4状态,气缸11两端泄气,此时可进行手动操作。至此完成一个作业循环。
40.优选的,气源31出口设置有三联体32。
41.上面结合附图对本发明实施例作了详细说明,但是本发明不限于上述实施例,在所述技术领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1