具散热和前馈式主动噪音控制功能的电子系统的制作方法
1.本发明提供一种具散热和前馈式主动噪音控制功能的电子系统,尤指一种具散热和前馈式主动宽频噪音控制功能的电子系统。
背景技术:
2.在现代化的信息社会,电脑系统已经成为多数人不可或缺的信息工具。为了避免元件因过热而发生功率降低或是毁损,电脑系统一般会使用风扇来提供散热功能,以将装置内部所产生的热量排出或是将装置外部的冷空气吸入。
3.风扇的转速和静压决定了风扇的空气流量,风扇运转时的噪音大约和其转速的五次方根成正比,转速越快散热能力越强,但造成的噪音越大。随着中央处理器的功能越来越强,装置内部所产生的废热也因此增加,加上微型化的趋势会降低热流效率,如何兼顾散热和降噪是重要课题。
技术实现要素:
4.本发明提供一种具散热和前馈式主动噪音控制功能的电子系统,其包含一风扇模块、一嵌入式控制器、一参考麦克风、一误差麦克风、一主动降噪控制器,以及一扬声器模块。该风扇模块用来依据一风扇控制信号来运行以提供散热功能。该嵌入式控制器用来提供该风扇控制信号和一同步信号,其中该同步信号包含该风扇模块的结构和运行设定的信息。该参考麦克风用来检测该风扇模块运行时所产生的宽频噪音以提供相对应的一宽频噪音信号。该误差麦克风用来检测该电子系统运行时所产生的噪音以提供相对应的一误差信号。该主动降噪控制器,用来依据该同步信号、该宽频噪音信号和该误差信号求出该风扇模块运行时的一实际单叶片基频、一实际单叶片倍频、一实际bpf基频、一实际bpf倍频和一实际宽频噪音频谱,以及依据该实际单叶片基频、该实际单叶片倍频、该实际bpf基频、该实际bpf倍频和该实际宽频噪音频谱来产生一扬声器控制信号。该扬声器模块用来依据该扬声器控制信号来提供一反相噪音信号。其中该反相噪音信号包含多个噪音消除波形,其分别为相关于该实际单叶片基频、该实际单叶片倍频、该实际bpf基频、该实际bpf倍频和该宽频噪音频谱的反向信号,且该参考麦克风和该主动降噪控制器之间的距离大于该误差麦克风和该主动降噪控制器之间的距离。
附图说明
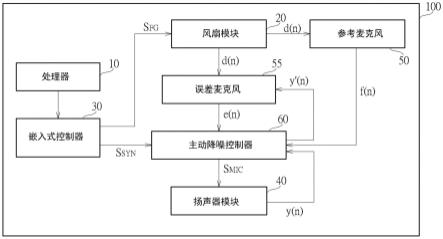
5.图1为本发明实施例中一种具散热和前馈式主动噪音控制功能的电子系统的功能方框图。
6.图2为本发明实施例中主动降噪控制器实作方式的示意图。
7.图3为本发明实施例中电子系统运行时的流程图。
8.其中,附图标记说明如下:
9.10:处理器
10.20:风扇模块
11.30:嵌入式控制器
12.40:扬声器模块
13.50:参考麦克风
14.55:误差麦克风
15.60:主动降噪控制器
16.62:频率计算器
17.64:信号产生器
18.66:数字滤波器
19.68:扬声器模块驱动电路
20.70:次级路径补偿转移函数模块
21.72:次级路径转移函数模块
22.74:噪音加权和转换模块
23.76:适应性滤波器
24.100:电子系统
25.310-360:步骤
26.sfg:风扇控制信号
27.smic:扬声器控制信号
28.ssyn:同步信号
29.y(n):反相噪音信号
30.y’(n):校正反相噪音信号
31.e(n):误差信号
32.e’(n):处理后误差信号
33.f(n):宽频噪音频谱信号
34.d(n):噪音信号
具体实施方式
35.图1为本发明实施例中一种具散热和前馈式主动噪音控制功能的电子系统100的功能方框图。电子系统100包含一处理器10、一风扇模块20、一嵌入式控制器(embedded controller,ec)30、一扬声器模块40、一参考麦克风50、一误差麦克风55,以及一主动降噪(active noise cancellation,anc)控制器60。
36.处理器10可为一中央处理器(central processing unit,cpu)或一图形处理器(graphics processing unit,gpu),其为电子系统100中关键的运算引擎,负责执行作业系统所需的指令与程序,也是电子系统100中废热的主要来源。
37.风扇模块20视其类型可具备不同结构,主要都是利用马达带动扇叶转动,以将较冷的空气带到机箱内部,并将内部较热的空气排出,进而达到散热效果。在本发明中,风扇模块20会依据嵌入式控制器30提供的一风扇控制信号s
fg
来运行,风扇控制信号s
fg
的值越大,风扇模块20中的马达转速越快,散热效果越强,但也会产生较大噪音。在电子系统100的运行期间,风扇模块20通常会是主要的噪音来源。在一实施例中,风扇控制信号s
fg
可为一脉
冲频宽调变(pulse width modulation,pwm)的方波信号,通过改变其工作周期(duty cycle)来调整风扇模块20中的马达转速。在一实施例中,风扇模块20可包含一个或多个轴流式风扇或离心式风扇。然而,风扇模块20所包含的风扇数目、风扇类型和风扇驱动方式并不限定本发明的范畴。
38.嵌入式控制器30会储存相关电子系统100各项运行的ec代码和开机时重要信号的时序。在关机状态下,嵌入式控制器30会一直保持运行以等待用户的开机信息;在开机状态下,嵌入式控制器30会控制系统的待机/休眠状态、键盘控制器、充电指示灯,和风扇模块20中的马达转速。嵌入式控制器30通常包含一温度感测器(未显示于图1)来监控处理器10的操作温度,并依此输出风扇控制信号s
fg
。当处理器10的操作温度越高,风扇控制信号s
fg
的工作周期越大,而风扇模块20中的马达转速越快;当处理器10的操作温度越低,风扇控制信号s
fg
的工作周期越小,而风扇模块20中的马达转速越慢。
39.扬声器模块40是一种可将电子信号转换成声音信号的电子元件,通常包含振膜(diaphragm)和由电磁铁和音圈所组成的驱动电路。扬声器模块40可依据anc控制器60提供的一扬声器控制信号s
mic
来运行,当扬声器控制信号s
mic
的电流通过音圈时,音圈即随着电流的频率振动,而和音圈相连的振膜当然也就跟着振动,进而推动周围的空气振动以产生声音。在本发明实施例中,扬声器模块40的振膜会设置在风扇模块20的出风结构内,可依据扬声器控制信号s
mic
来产生一反相噪音信号y(n)。
40.参考麦克风50设置在接近风扇模块20中风扇叶片的位置,用来撷取风扇模块20运行时所产生的噪音,并将测量到的一宽频噪音信号f(n)传送至anc控制器60,其中宽频噪音信号f(n)包含风扇模块20运行时所产生气流噪音的宽频噪音频谱。在一实施例中,参考麦克风50可为一数字式微机电系统(micro electro mechanical system,mems)麦克风,其具备高耐热、高抗振和高抗射频干扰等性能。然而,参考麦克风50的种类并不限定本发明的范畴。
41.误差麦克风55用来撷取电子系统100运行时的整体噪音,并输出相对应的误差信号e(n)至anc控制器60,其中d(n)代表在电子系统100运行期间欲消除的噪音信号。由于风扇模块20为主要噪音源,误差麦克风55可设置在接近风扇模块20的出风口之处,其中参考麦克风50和anc控制器60之间的距离大于误差麦克风55和anc控制器60之间的距离。误差麦克风55可通过一主要路径和一次级路径来检测噪音:主要路径相关于风扇模块20和误差麦克风55之间的信号传递路径,通过主要路径会撷取到噪音信号d(n);而次级路径相关于扬声器模块40和误差麦克风20间的信号传递路径,通过次级路径会撷取到相关反相噪音信号y(n)的一校正后反相噪音信号y’(n)。更详细地说,误差麦克风55所输出的误差信号e(n)为噪音信号d(n)和校正后反相噪音信号y’(n)之间的差值,误差信号e(n)的值越小代表降噪效果越好。在一实施例中,误差麦克风55可为一数字式mems麦克风,其具备高耐热、高抗振和高抗射频干扰等性能。然而,误差麦克风55的种类并不限定本发明的范畴。
42.anc控制器60可从嵌入式控制器30接收一同步信号s
syn
、从参考麦克风50接收宽频噪音信号f(n),以及从误差麦克风55接收误差信号e(n),其中同步信号s
syn
包含相关风扇模块20的结构(例如各风扇叶片数)和运行设定(例如在不同模式下马达转速)的信息。依据同步信号s
syn
及宽频噪音信号f(n),anc控制器60可计算出风扇模块20在实际运行时所产生噪音中的宽频带噪音;依据同步信号s
syn
及误差信号e(n),anc控制器60可计算出风扇模块20
在实际运行时所产生噪音中的窄频带噪音。依据计算出的宽频带噪音和窄频带噪音,anc控制器60可依此提供扬声器控制信号s
mic
以驱动扬声器模块40,使得扬声器模块40提供的反相噪音信号y(n)能有效地抵消噪音信号d(n),亦即尽量让误差信号e(n)降至0。
43.图2为本发明实施例中anc控制器60实作方式的示意图。anc控制器60包含一频率计算器62、一信号产生器64、一数字滤波器66、一扬声器模块驱动电路68、一次级路径补偿转移函数模块70、一次级路径转移函数模块72、一噪音加权和转换模块74,以及一适应性滤波器76。
44.图3为本发明实施例中电子系统100运行时的流程图,其包含下列步骤:
45.步骤310:参考麦克风50撷取风扇模块20运行时所产生的噪音,并提供相对应的宽频噪音信号f(n)。
46.步骤320:误差麦克风55撷取电子系统100运行时的整体噪音,并提供相对应的误差信号e(n)。
47.步骤330:anc控制器60从嵌入式控制器30提供的同步信号s
syn
得到风扇模块20中各风扇叶片数和在各模式下马达转速,并计算出相对应的参考信号x(n)。
48.步骤340:anc控制器60依据宽频噪音信号f(n)、误差信号e(n)和参考信号x(n)求出风扇模块20运行时的实际单叶片基频、实际单叶片倍频、实际叶片通过频率(blade passing frequency,bpf)和实际宽频噪音频谱等信息,并依此提供扬声器控制信号s
mic
。
49.步骤350:扬声器模块40依据扬声器控制信号s
mic
产生反相噪音信号y(n)。
50.步骤360:anc控制器60针对次级路径校正参考信号x(n)提供校正后参考信号x’(n),以及校正反向噪音信号y(n)以提供校正后反向噪音信号y’(n);执行步骤310。
51.风扇模块20在运行时的噪音源来自马达转动造成的空气流,其中窄频成份可能源自于由扇叶运动所产生体积位移的厚度噪音,或由扇叶表面的变动性负载力(有轴向的升力与风扇面的拉力)所造成的bpf噪音。由于bpf及相关谐波与在每一风扇叶片通过固定参考点时产生的压力扰动有关,当扇叶尖端产生周期性压力波时就会产生特定的窄频噪音。另一方面,当空气流流经风扇叶片时,会从风扇叶片的边界层(boundary layer)或叶片尖端两侧剥离而形成交替的涡流,此种现象称为涡流剥离(vortex shedding)。涡流剥离会使风扇叶片两侧流体的瞬间速度不同,在不同流体速度下风扇叶片两侧受到的瞬间压力也不同,因此会使风扇叶片发生振动而产生特定的宽频噪音。
52.在步骤310中,参考麦克风50会在电子系统100运行时撷取风扇模块20在运行时因叶片造成的噪音,并提供相对应的宽频噪音信号f(n)。在步骤320中,误差麦克风55会撷取电子系统100运行时的整体噪音并提供相对应的误差信号e(n)。如前所述,误差麦克风55所提供的误差信号e(n)为噪音信号d(n)和校正后反相噪音信号y’(n)之间的差值,而噪音信号d(n)主要来自风扇模块20运行时扇叶的转动。
53.在步骤330中,anc控制器60的频率计算器62可依据嵌入式控制器30提供的同步信号s
syn
得知风扇模块20的马达转速、单叶片频率点和叶片数,其中bpf的值为风扇模块20的马达转速和叶片数的乘积。假设风扇模块20的叶片数为37,下列表一显示了频率计算器62所计算出的数据,但并不限定本发明的范畴。马达转速的单位为rpm,而频率单位为赫兹。
54.马达转速基频二倍频三倍频四倍频叶片数bpfbpfx2bpfx35008.316.624.933.237307.1614.2921.3
100016.633.249.866.437614.21228.41842.615002550751003792518502775200033.366.699.9133.2371232.12464.23696.3250041.783.4125.1166.8371542.93085.84628.730005010015020037185037005550350058.3116.6174.9233.2372157.14314.26471.3400066.7133.4200.1266.8372467.94935.87403.745007515022530037277555508325500083.3166.6249.9333.2373082.16164.29246.3550091.6183.2274.8366.4373389.26778.410167.6570095190285380373515703010545
55.表一
56.接着,anc控制器60的信号产生器64会依据频率计算器62计算出来的数据来产生参考信号x(n),其中参考信号x(n)包含风扇模块20的预估倍频、预估bpf,以及不同马达转速下声压频谱(dbspl)等信息,可决定扬声器控制信号s
mic
的基准功率值,而通过调整数字滤波器66的参数w(z)可改变扬声器控制信号s
mic
的功率值。
57.在步骤340和350中,anc控制器60的数字滤波器66会依据宽频噪音信号f(n)、误差信号e(n)和参考信号x(n)来驱动扬声器模块驱动电路68以输出扬声器控制信号s
mic
,进而驱动扬声器模块40以提供反相噪音信号y(n),其中w(z)代表数字滤波器66的可调整运行参数。
58.扬声器模块40自身特性和运行时发送至风扇模块20的白噪音(white noise)会影响扬声器模块40和误差麦克风55之间的次级路径,假设扬声器模块40目前提供的反相噪音信号y(n)可完全抵消噪音信号d(n),但在经由次级路径传送后,误差麦克风55撷取到的反相噪音信号y(n)可能会因为信号衰减或变形而无法完全抵消噪音信号d(n)。因此,在步骤360中,anc控制器60的次级路径补偿转移函数模块70可从嵌入式控制器30得知次级路径的预估信号再依据预估信号来校正参考信号x(n)以提供校正后参考信号x’(n)。anc控制器60的次级路径转移函数模块72可为一频谱分析仪,用来测量次级路径的实际频率响应s(z),再依此校正反向噪音信号y(n)以提供校正后反向噪音信号y’(n),进而补偿次级路径对信号传输造成的影响。
59.噪音加权转换模块74耦接至误差麦克风55,可依据一特定信号加权方式和信号转换方式来处理误差麦克风55测量到的误差信号e(n),再将处理后的误差信号e’(n)传送至适应性滤波器76。在一实施例中,噪音加权转换模块74可采用a加权(a weighting)和快速傅立叶变换(fast fourier transform,fft)来处理误差信号e(n)。然而,噪音加权转换模块74所使用的信号加权方式和信号转换方式并不限定本发明的范畴。
60.适应性滤波器76耦接至次级路径补偿转移函数模块70和噪音加权转换模块74,可依据一特定演算法来处理校正后参考信号x’(n)和处理后误差信号e’(n),进而调整数字滤波器66的参数w(z)。更详细地说,校正后参考信号x’(n)包含风扇模块20的马达转速、预估单叶片基频、预估倍频和预估bpf等信息,适应性滤波器76再依据处理后误差信号e’(n)即
可求出风扇模块20运行时的实际单叶片基频、实际倍频和实际bpf等相关窄频噪音的信息,进而依此调整数字滤波器66的参数w(z)。如此一来,当数字滤波器66驱动扬声器模块驱动电路68以输出扬声器控制信号s
mic
时,扬声器模块40所产生的反相噪音信号y(n)会反应风扇模块20的实际运行状况和目前降噪程度。更明确地说,反相噪音信号y(n)包含多个噪音消除波形,其分别为相关于实际单叶片基频、实际单叶片倍频、实际bpf基频、实际bpf倍频和宽频噪音频谱的反向信号。
61.在一实施例中,适应性滤波器76可依据最小均方(least mean square,lms)演算法来处理校正后参考信号x’(n)和处理后误差信号e’(n)。然而,适应性滤波器76所使用的演算法并不限定本发明的范畴。
62.综上所述,在本发明的电子系统100中,参考麦克风50会在电子系统100运行时撷取风扇模块20在运行时因叶片造成的噪音并提供相对应的宽频噪音信号f(n),而误差麦克风55会撷取电子系统100运行时的整体噪音并提供相对应的误差信号e(n)。依据宽频噪音信号f(n)、误差信号e(n)和嵌入式控制器30提供的风扇信息,anc控制器60会计算出风扇模块20在实际运行时所产生的窄频带噪音和宽频带噪音,再依此驱动扬声器模块40以提供反相噪音信号y(n),使得反相噪音信号y(n)能抵消电子系统100运行时所产生噪音。通过适应性地调整反向噪音信号以将误差信号的值调至0,本发明能兼顾散热和降噪的重要课题。
63.以上所述仅为本发明的较佳实施例,凡依本发明权利要求所做的均等变化与修饰,皆应属本发明的涵盖范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1