一种电液气混合控制的自适应爬树整枝系统
1.本发明涉及电液气混合控制技术的领域,特别是涉及一种电液气混合控制的自适应爬树整枝系统。
背景技术:
2.按照我国林业生产要求,为了提高林业生产质量,促进树木健康生长,保证树木各方面指标达到合理要求,必须对树林进行合理的管理,其中整枝就是重要的一项。
3.随着林业生产方式逐步向自动化智能化方向转变,我国研制出了各种不同型号功能的自动整枝机器,这些机器应用在杉木、马尾松、落叶松、侧柏、桉树等人工速生丰产林的整枝作业中,以代替采用手锯、砍刀、手持修剪锯等方式的人工修剪,整枝机器设备的发展极大减少了劳动力成本和林业工作的安全隐患,提高了林业生产效率,促进了林业生产现代化。
4.发明专利2020113979148设计了一种履带式液压驱动立木整枝机,为使机器能完成高效率、智能化的整枝作业,我们为这款机器设计了一种电液气混合控制的自适应爬树整枝系统。
技术实现要素:
5.本技术所要解决的技术问题是针对上述现有技术的不足提供一种电液气混合控制的自适应爬树整枝系统,本电液气混合控制的自适应爬树整枝系统可使得整枝机能自适应树干直径变化,依靠冲击力实现高速整枝,极大的提高整枝效率。
6.为实现上述技术目的,本技术采取的技术方案为:
7.一种电液气混合控制的自适应爬树整枝系统,其特征在于,包括液控系统、气控系统和电控系统。
8.所述液控系统包括油箱、过滤器、液压泵、第一单向阀、第一安全阀、第一比例减压阀、变量节流阀、三位四通m型电磁换向阀、液压锁、液压马达;液压泵的进油口连接过滤器的出油口、过滤器的进油口连接油箱,液压泵的出油口连接第一单向阀的进油口,第一单向阀的出油口分别连接第一比例减压阀的进油口和第一安全阀的进油口,第一安全阀的回油口连接油箱,第一比例减压阀的出油口连接变量节流阀的进油口,变量节流阀的出油口连接三位四通m型电磁换向阀的进油口,三位四通m型电磁换向阀的第一出油口连接液压锁的第一进油口,液压锁第一出油口连接液压马达进油口,液压锁第二出油口连接液压马达出油口,三位四通m型电磁换向阀的第二出油口连接液压锁的第二进油口,三位四通m型电磁换向阀的回油口连接油箱。
9.所述气控系统包括气源、第二单向阀、二位四通电磁换向阀、第二安全阀、第二比例减压阀、第三比例减压阀、第四比例减压阀、第五比例减压阀、第六比例减压阀、第七比例减压阀、第一双作用摆动气缸、第二双作用摆动气缸、第三双作用摆动气缸、第四双作用摆动气缸、第一双作用单杆气缸、第二双作用单杆气缸;气源的出气口分别连接第二单向阀的
进气口和第二安全阀的进气口,第二安全阀的回气口连接气源,第二单向阀的出气口连接二位四通电磁换向阀进气口,二位四通电磁换向阀第一出气口分别连接第二比例减压阀进气口、第三比例减压阀进气口、第四比例减压阀进气口、第五比例减压阀进气口、第六比例减压阀进气口、第七比例减压阀进气口,第二比例减压阀出气口连接第一双作用摆动气缸进气口,第三比例减压阀出气口连接第二双作用摆动气缸进气口,第四比例减压阀出气口连接第三双作用摆动气缸进气口,第五比例减压阀出气口连接第四双作用摆动气缸进气口,第六比例减压阀出气口连接第一双作用单杆气缸有杆腔接口,第七比例减压阀出气口连接第二双作用单杆气缸有杆腔接口,第一双作用摆动气缸出气口、第二双作用摆动气缸出气口、第三双作用摆动气缸出气口、第四双作用摆动气缸出气口、第一双作用单杆气缸无杆腔接口、第二双作用单杆气缸无杆腔接口分别连接二位四通电磁换向阀第二出气口,二位四通电磁换向阀回气口连接气源。
10.所述电控系统包括电动机、角速度传感器、位移传感器、第一压力传感器、第二压力传感器、第三压力传感器、第四压力传感器、第五压力传感器、第六压力传感器、第一pid控制器、第二pid控制器、第三pid控制器、第四pid控制器、第五pid控制器、第六pid控制器、第七pid控制器、第八pid控制器、第九pid控制器;电动机的转子与液压泵连接,角速度传感器通过第一pid控制器控制变量节流阀,位移传感器通过第二pid控制器控制三位四通m型电磁换向阀,第一压力传感器通过第三pid控制器控制第二比例减压阀,第二压力传感器通过第四pid控制器控制第三比例减压阀,第三压力传感器通过第五pid控制器控制第四比例减压阀,第四压力传感器通过第六pid控制器控制第五比例减压阀,第五压力传感器通过第七pid控制器控制第六比例减压阀,第六压力传感器分别通过第八pid控制器和第九pid控制器控制第七比例减压阀和第一比例减压阀。
11.作为本技术进一步改进的技术方案,所述液压泵为定量泵,液压泵还装有冷却器、压力表和温度计。
12.作为本技术进一步改进的技术方案,所述液压锁是液控单向阀。
13.作为本技术进一步改进的技术方案,所述第一双作用摆动气缸、第二双作用摆动气缸、第三双作用摆动气缸、第四双作用摆动气缸规格型号相同。
14.作为本技术进一步改进的技术方案,所述第一双作用单杆气缸缸径大于第二双作用单杆气缸。
15.作为本技术进一步改进的技术方案,所述第一单向阀、第一安全阀、第一比例减压阀为液压元件。
16.作为本技术进一步改进的技术方案,所述第二单向阀、第二安全阀、第二比例减压阀、第三比例减压阀、第四比例减压阀、第五比例减压阀、第六比例减压阀、第七比例减压阀为气压元件。
17.作为本技术进一步改进的技术方案,所述电控系统还包括plc控制器,plc控制器通过其闭环控制模块实现pid控制。
18.本技术的有益效果为:(1)本技术为履带式液压驱动立木整枝机设计的电液气控制系统,能实现夹紧力的自适应调节,冲击力的调节,实现全自动化的整枝;(2)本技术能提高林木整枝效率;(3)本技术的操作方式简单安全。
附图说明
19.图1为本发明中一种电液气混合控制的自适应爬树整枝系统的连接图;
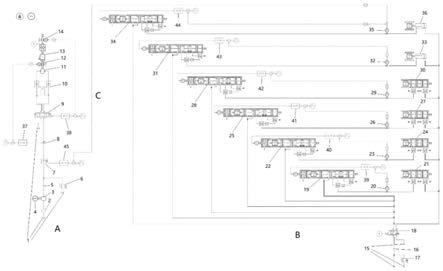
20.图2为本发明中一种电液气混合控制的自适应爬树整枝系统的各部件连接图;
21.附图中各部件的标记如下:a、液控系统;b、气控系统;c、电控系统;1、油箱;2、过滤器;3、液压泵;4、电动机;5、第一单向阀;6、第一安全阀;7、第一比例减压阀;8、变量节流阀;9、三位四通m型电磁换向阀;10、液压锁;11、液压马达;12、角速度传感器;13、负载;14、位移传感器;15、气源;16、第二单向阀;17、第二安全阀;18、二位四通电磁换向阀;19、第二比例减压阀;20、第一压力传感器;21、第一双作用摆动气缸;22、第三比例减压阀;23、第二压力传感器;24、第二双作用摆动气缸;25、第四比例减压阀;26、第三压力传感器;27、第三双作用摆动气缸;28、第五比例减压阀;29、第四压力传感器;30、第四双作用摆动气缸;31、第六比例减压阀;32、第五压力传感器;33、第一双作用单杆气缸;34、第七比例减压阀;35、第六压力传感器;36、第二双作用单杆气缸;37、第一pid控制器;38、第二pid控制器;39、第三pid控制器;40、第四pid控制器;41、第五pid控制器;42、第六pid控制器;43、第七pid控制器;44、第八pid控制器;45、第九pid控制器;a、整枝机;b、树干;c、电液气集成管路;d、液压站;e、空气压缩机;f、电控柜。
具体实施方式
22.下面结合附图对本发明的较佳实施例进行详细阐述,以使本发明的优点和特征能更易于被本领域技术人员理解,从而对本发明的保护范围做出更为清楚明确的界定。
23.如图1所示,一种电液气混合控制的自适应爬树整枝系统,包括液控系统a、气控系统b和电控系统c。
24.所述液控系统a包括油箱1、过滤器2、液压泵3、第一单向阀5、第一安全阀6、第一比例减压阀7、变量节流阀8、三位四通m型电磁换向阀9、液压锁10、液压马达11;液压泵3的进油口连接过滤器2的出油口、过滤器2的进油口连接油箱1,液压泵3的出油口连接第一单向阀5的进油口,第一单向阀5的出油口分别连接第一比例减压阀7的进油口和第一安全阀6的进油口,第一安全阀6的回油口连接油箱1,第一比例减压阀7的出油口连接变量节流阀8的进油口,变量节流阀8的出油口连接三位四通m型电磁换向阀9的进油口,三位四通m型电磁换向阀9的第一出油口连接液压锁3的第一进油口,液压锁3第一出油口连接液压马达11进油口,液压锁10第二出油口连接液压马达11出油口,三位四通m型电磁换向阀9的第二出油口连接液压锁10的第二进油口,三位四通m型电磁换向阀9的回油口连接油箱1。
25.所述气控系统b包括气源15、第二单向阀16、二位四通电磁换向阀18、第二安全阀17、第二比例减压阀19、第三比例减压阀22、第四比例减压阀25、第五比例减压阀28、第六比例减压阀31、第七比例减压阀34、第一双作用摆动气缸21、第二双作用摆动气缸24、第三双作用摆动气缸27、第四双作用摆动气缸30、第一双作用单杆气缸33、第二双作用单杆气缸36;气源15的出气口分别连接第二单向阀16的进气口和第二安全阀17的进气口,第二安全阀17的回气口连接气源15,第二单向阀16的出气口连接二位四通电磁换向阀18进气口,二位四通电磁换向阀18第一出气口分别连接第二比例减压阀19进气口、第三比例减压阀22进气口、第四比例减压阀25进气口、第五比例减压阀28进气口、第六比例减压阀31进气口、第七比例减压阀34进气口,第二比例减压阀19出气口连接第一双作用摆动气缸21进气口,第
三比例减压阀22出气口连接第二双作用摆动气缸24进气口,第四比例减压阀25出气口连接第三双作用摆动气缸27进气口,第五比例减压阀28出气口连接第四双作用摆动气缸30进气口,第六比例减压阀31出气口连接第一双作用单杆气缸33有杆腔接口,第七比例减压阀34出气口连接第二双作用单杆气缸36有杆腔接口,第一双作用摆动气缸21出气口、第二双作用摆动气缸24出气口、第三双作用摆动气缸27出气口、第四双作用摆动气缸30出气口、第一双作用单杆气缸33无杆腔接口、第二双作用单杆气缸36无杆腔接口分别连接二位四通电磁换向阀18第二出气口,二位四通电磁换向阀18回气口连接气源15。
26.所述电控系统c包括电动机4、角速度传感器12、位移传感器14、第一压力传感器20、第二压力传感器23、第三压力传感器26、第四压力传感器29、第五压力传感器32、第六压力传感器35、第一pid控制器37、第二pid控制器38、第三pid控制器39、第四pid控制器40、第五pid控制器41、第六pid控制器42、第七pid控制器43、第八pid控制器44、第九pid控制器45;电动机4的转子与液压泵3连接,角速度传感器12通过第一pid控制器37控制变量节流阀8,位移传感器14通过第二pid控制器37控制三位四通m型电磁换向阀9,第一压力传感器20通过第三pid控制器39控制第二比例减压阀19,第二压力传感器23通过第四pid控制器40控制第三比例减压阀22,第三压力传感器26通过第五pid控制器41控制第四比例减压阀25,第四压力传感器29通过第六pid控制器42控制第五比例减压阀28,第五压力传感器32通过第七pid控制器43控制第六比例减压阀31,第六压力传感器35分别通过第八pid控制器44和第九pid控制器45控制第七比例减压阀34和第一比例减压阀7。
27.如图2所示,本实施例的适用机器包括整枝机、电液气集成管路、液压站、空气压缩机和电控柜;其中液压站、空气压缩机和电控柜位于地面,整枝机通过电液气集成管路与地面液压站、空气压缩机和电控柜相连。
28.本发明专利能使整枝机自适应树干直径变化,实现实时夹紧树干,能依靠冲击力实现高速整枝,极大的提高整枝效率。
29.以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1