用于风扇的驱动装置以及驱动程序更新方法与流程
1.本发明涉及一种驱动装置以及驱动程序更新方法,尤其涉及一种用于风扇单元的驱动装置以及驱动程序更新方法。
背景技术:
2.现行的风扇装置会基于驱动程序以及输入信号来运行。风扇装置可基于驱动程序以及输入信号的频率或电压值来决定风扇的转速或运行模式。然而,当驱动程序被判断出有误或者是不适用于对应的风扇装置时。现行的作法是更换用以存储驱动程序的存储组件。举例来说,存储驱动程序的存储组件被解焊,并换上新的存储组件。这样的作法会耗费教大的时间与成本。
技术实现要素:
3.本发明提供一种用于风扇单元的驱动装置以及驱动程序更新方法,能够对驱动程序进行更新。
4.本发明的驱动装置用于驱动风扇单元。驱动装置包括信号转换器、存储电路、控制器、驱动器以及检测电路。信号转换器接收第一信号,并将第一信号转换为第二信号。存储电路存储驱动程序。控制器耦接于信号转换器以及存储电路。控制器反应于第二信号以及驱动程序来提供控制信号。驱动器耦接于所述控制器。驱动器反应于控制信号来驱动风扇单元。检测电路耦接于存储电路。检测电路检测第一信号是否包括程序更新命令。当第一信号包括程序更新命令时,检测电路基于程序更新命令来更新存储于存储电路的驱动程序。
5.在本发明用于风扇单元的驱动程序更新方法包括:接收第一信号,并将第一信号转换为第二信号;反应于第二信号以及驱动程序来提供控制信号,从而驱动风扇单元;检测第一信号是否包括程序更新命令;以及当第一信号包括程序更新命令时,基于程序更新命令更新驱动程序。
6.基于上述,当第一信号包括程序更新命令时,本发明的驱动装置以及驱动程序更新方法基于程序更新命令更新驱动程序。因此,本发明提供驱动程序的更新机制。如此一来,修改驱动程序的时间与成本可以大幅被降低。此外,第二信号以及程序更新命令都是来自于第一信号。因此,本发明不需要增加引脚来更新驱动程序。
7.为让本发明的上述特征和优点能更明显易懂,下文特举实施例,并配合附图作详细说明如下。
附图说明
8.图1是依据本发明一实施例所示出的风扇装置的示意图;
9.图2是依据图1所示出的驱动装置的示意图;
10.图3是依据本发明一实施例所示出的驱动程序更新方法的方法流程图;
11.图4是依据本发明另一实施例所示出的驱动装置的示意图;
12.图5是依据本发明一实施例所示出的位于引脚p2、p4的信号时序图。
13.附图标记说明
14.100:风扇装置
15.110:风扇单元
16.120、220:驱动装置
17.121、221:信号转换器
18.122、222:存储电路
19.123、223:控制器
20.124、224:驱动器
21.125、225:检测电路
22.226:电压电平检测器
23.cmd:程序更新命令
24.fg:信号
25.gnd:接地
26.p1~p4:引脚
27.ptc:驱动程序
28.s1:第一信号
29.s2:第二信号
30.s110~s140:步骤
31.sc:控制信号
32.sdr:驱动电力
33.sfg、spwm:时序
34.sh1:第一沟通信号
35.sh2:第二沟通信号
36.t1、t2、t3:时间区间
37.vcc:电源
具体实施方式
38.现将详细地参考本发明的示范性实施例,示范性实施例的实例说明于附图中。只要有可能,相同组件符号在附图和描述中用来表示相同或相似部分。
39.请参考图1,图1是依据本发明一实施例所示出的风扇装置的示意图。在本实施例中,风扇装置100包括风扇单元110以及驱动装置120。驱动装置120用以驱动风扇单元110。风扇装置100具有引脚p1~p4。引脚p1用以接收电源vcc。引脚p2用以接收第一信号s1。引脚p3用以连接至接地gnd。引脚p4用以输出信号fg。引脚p4一般被称为fg引脚。应注意的是,相较于现行的风扇装置,风扇装置100的引脚数量并没有被增加。
40.在本实施例中,驱动装置120基于电源vcc而运行,并基于第一信号s1以及驱动程序ptc来驱动风扇单元110。此外,当第一信号s1包括程序更新命令时,驱动装置120会基于程序更新命令来更新驱动程序ptc。
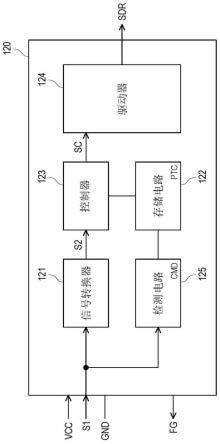
41.进一步来说明,请参考图1以及图2,图2是依据本发明第一实施例所示出的驱动装
置的示意图。在本实施例中,驱动装置120包括信号转换器121、存储电路122、控制器123、驱动器124以及检测电路125。信号转换器121接收第一信号s1,并将第一信号s1转换为第二信号s2。存储电路122存储驱动程序ptc。控制器123耦接于信号转换器121以及存储电路122。控制器123接收第二信号s2以及驱动程序ptc。控制器123反应于第二信号s2以及驱动程序ptc来提供控制信号sc。驱动程序ptc依据第二信号s2的波形提供产生控制信号sc。驱动程序ptc可能基于不同的风扇装置100而不同。举例来说,驱动程序ptc可能基于不同的人机控制接口而不同。另举例来说,驱动程序ptc可能基于不同的风扇单元110而不同。
42.在本实施例中,第一信号s1为具有频率范围的脉宽调变(pulse-width modulation,pwm)信号。第二信号s2为电压信号。第二信号s2的电压值关联于上述频率范围中的频率。举例来说,第二信号s2的电压值正相关于第一信号s1的频率。第二信号s2的电压值正相关于风扇单元110的转速。应注意的是,第一信号s1为具备高精准度的数字信号。第二信号s2为具备高抗噪效果的模拟信号。因此,驱动装置120兼具高精准度以及高抗噪效果。
43.在本实施例中,驱动器124耦接于控制器123。举例来说,驱动程序ptc可以是软件(software)或固件(firmware)。驱动器124反应于控制器123所提供的控制信号sc来驱动风扇单元110。进一步地,驱动器124反应于控制信号sc以输出驱动电力sdr,并利用驱动电力sdr来驱动风扇单元110。
44.在本实施例中,检测电路125耦接于存储电路122。检测电路125检测第一信号s1的成分。检测电路125检测第一信号s1是否包括程序更新命令cmd。当第一信号s1包括程序更新命令cmd时,检测电路125基于程序更新命令cmd来更新存储于存储电路122的驱动程序ptc。在另一方面,当第一信号s1不包括程序更新命令cmd时,检测电路125则不会更新存储于存储电路122的驱动程序ptc。
45.在此值得一提的是,当第一信号s1包括程序更新命令cmd时,驱动装置120基于程序更新命令cmd来更新驱动程序ptc。因此,当驱动程序ptc并不适合于风扇装置100时、当驱动程序ptc须要被优化时或者是当驱动程序ptc损毁时,驱动装置120能够基于程序更新命令cmd来更新驱动程序ptc。如此一来,更新驱动程序ptc的时间与成本可以大幅被降低。此外,第二信号s2以及程序更新命令ptc都是来自于第一信号s1。因此,驱动装置120仅仅经由引脚p2即可更新驱动程序ptc。如此一来,驱动装置120并不需要增加额外的引脚来更新驱动程序ptc。
46.在本实施例中,程序更新命令cmd的频率大于第一信号s1的频率范围中的最大频率。举例来说,程序更新命令cmd的频率大约是数百万赫(mhz)。第一信号s1的最大频率大约是数千赫(khz)。因此,包括程序更新命令cmd的第一信号s1可被视为第一信号s1搭载着具有较高频率的程序更新命令cmd。检测电路125可以基于频率来识别第一信号s1是否搭载程序更新命令cmd。当第一信号s1乘载程序更新命令cmd的频率(数百万赫(mhz))时,检测电路125会检测出第一信号s1包括程序更新命令cmd,并更新存储于存储电路122的驱动程序ptc。
47.在本实施例中,程序更新命令cmd包括存储地址以及更新码(updating code)。更新码是对应于新的驱动程序ptc的数据。因此,检测电路125能够基于存储地址以及更新码将新的驱动程序ptc存储到存储电路122的指定地址。
48.在本实施例中,存储电路122例如是任何型态的存储媒体。控制器123以及检测电路125分别例如是可程序化的一般用途或特殊用途的微处理器(microprocessor)、数字信号处理器(digital signal processor,dsp)、可程序化控制器、特殊应用集成电路(application specific integrated circuits,asic)、可程序化逻辑设备(programmable logic device,pld)或其他类似装置或这些装置的组合,其可加载并执行计算机程序。驱动器124例如是由多个功率晶体管所构成栅极驱动器(gate driver)。上述多个功率晶体管的上臂功率晶体管可以是任意形式的n型功率晶体管或p型功率晶体管,例如是金属氧化物半导体场效晶体管(metal-oxide-semiconductor field-effect transistor,mosfet)或者是绝缘栅双极晶体管(insulated gate bipolar transistor,igbt)。上述多个功率晶体管的下臂功率晶体管可以是任意形式的n型功率晶体管。
49.请同时参考图1以及图3,图3是依据本发明一实施例所示出的驱动程序更新方法的方法流程图。在本实施例中,驱动程序更新方法可适用于驱动装置120。在步骤s110中,驱动装置120接收第一信号s1并且将第一信号s1转换为第二信号s2。在步骤s120中,驱动装置120反应于第二信号s2以及驱动程序ptc来提供控制信号sc,并基于控制信号sc来驱动风扇单元110。在步骤s130中,驱动装置120检测第一信号s1是否包括程序更新命令cmd。当第一信号s1包括程序更新命令cmd时,驱动装置120会在步骤s140中基于程序更新命令cmd来更新驱动程序ptc,接着驱动程序更新方法回到步骤s110。在另一方面,在步骤s130中,当第一信号s1被检测出不包括程序更新命令cmd时,驱动程序更新方法则回到步骤s110。本实施例的步骤s110~s140的实施细节可以由图1以及图2的实施例中获得足够的教示,因此恕不在此重述。
50.请参考图4,图4是依据本发明另一实施例所示出的驱动装置的示意图。在本实施例中,驱动装置220包括信号转换器221、存储电路222、控制器223、驱动器224、检测电路225以及电压电平检测器226。信号转换器221、存储电路222、控制器223、驱动器224以及检测电路225之间的协同操作相似于图2所示信号转换器121、存储电路122、控制器123、驱动器124以及检测电路125之间的协同操作。在本实施例中,电压电平检测器226耦接于信号转换器221以及控制器223。电压电平检测器226接收来自于信号转换器221的第二信号s2,并检测第二信号s2的电压值是否在默认电压值范围外。当第二信号s2的电压值被检测出在默认电压值范围外时,这表示第二信号s2的电压值并不适用于驱动风扇单元(如图1所示的风扇单元110)。因此,电压电平检测器226指示控制器223停止提供控制信号sc。在另一方面,当第二信号s2的电压值被检测出在默认电压值范围内时,这表示第二信号s2的电压值适用于驱动风扇单元。因此,电压电平检测器226指示控制器223提供控制信号sc。
51.请同时参考图1、图2以及图5,图5是依据本发明一实施例所示出的位于引脚p2、p4的讯时序图。在本实施例中,驱动装置120会与外部装置(未示出)进行交握(handshake)。在本实施例中,时序spwm是位于引脚p2的时序。时序sfg是位于引脚p4的时序。在时间区间t1中,信号转换器121经由引脚p2接收外部装置所提供的第一信号s1,并将第一信号s1转换为第二信号s2。检测电路125检测出第一信号s1不包括程序更新命令cmd。因此,被存储在存储电路122中的驱动程序ptc并不会被更新。控制器123反应于第二信号s2以及驱动程序ptc来提供控制信号sc。驱动器124反应于控制器123所提供的控制信号sc来驱动风扇单元110。
52.在时间区间t2中,信号转换器121经由引脚p2开始接收到外部装置所提供的第一
沟通信号sh1。控制器123在识别出第一沟通信号sh1的至少部分(如,第一沟通信号sh1的标头信号)后,会产生第二沟通信号sh2。接下来控制器123经由引脚p4将第二沟通信号sh2输出至外部装置。因此,驱动装置120与外部装置可透过交握方式进行沟通。举例来说,第一沟通信号sh1包括外部装置将提供程序更新命令cmd的通知信号。第二沟通信号sh2包括驱动装置120就绪的状态信号。
53.在时间区间t3中,在完成沟通之后,外部装置提供包括程序更新命令cmd的第一信号s1。检测电路125检测出第一信号s1包括程序更新命令cmd。因此,被存储在存储电路122中的驱动程序ptc会被更新。
54.综上所述,当第一信号包括程序更新命令时,本发明的驱动装置以及驱动程序更新方法基于程序更新命令来更新被存储的驱动程序。因此,本发明提供驱动程序的更新机制不需要更换用以存储驱动程序的存储组件。如此一来,修改驱动程序的时间与成本可以大幅被降低。第二信号以及程序更新命令都是来自于第一信号。如此一来,本发明并不需要增加额外的引脚来更新驱动程序。此外,由于第一信号为数字信号高速且具备高精准度,可达成高精准度转速控制,而第二信号为具备高抗噪效果的电压模拟信号,本发明的驱动装置可兼具驱动程序更新,控制高精准度以及环境噪声高抗噪的效果。
55.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1