一种臂式高空作业车工作台自动调平方法与流程
1.本发明涉及臂车工作领域,特别涉及一种臂式高空作业车工作台自动调平方法。
背景技术:
2.臂架式高空作业车在起升或下降时,由于机械结构的运动变化,操作平台将会出现倾斜,从而导致站在上面的人员无法站立或有跌落的危险。为了解决这一问题,技术上采用了操作平台随动的调平技术。在20米以下的臂车大多采用了液压自动耦合的方式,但随着臂车高度的增加,液压调平方式受到液压管路长度的制约,存在滞后和无法调平的现象。为了克服液压调平的缺陷,目前高米数都采用电控的自动调平方式,但现有技术中仍存在如下问题:1.在运动过程中,无法平稳均匀的实现动态控制,调平动作呈现出波动性,给站在平台的人员造成周期性颠簸和失重状态,操作体验性很差。造成这样的原因一方面是没有采用较好的控制算法,另外忽略了液压系统与电气系统的相互配合;2.现有调平是在大臂提升某些角度下无法快速响应调平动作,以至于工作平台无法达到水平状态,需要人为主动去调平;3. 现有电控调平只考虑在大臂工作时的调平控制,忽略了其他动作也需要平台调平,例如大臂伸出,上下坡等工况下也需要自动调平。
技术实现要素:
3.本发明的目的是提供高安全性及高效率的一种臂式高空作业车工作台自动调平方法。
4.本发明的目的是这样实现的:一种臂式高空作业车工作台自动调平方法,包括安装在底盘的底盘控制器,安装在平台上的平台控制器,双通道平台水平传感器,大臂上的角度长度传感器,和底盘的水平传感器组成;
5.所述底盘控制器通过can总线采集大臂角度长度传感器,平台水平传感器和底盘水平传感器的信号;经过调平控制策略,将需要输出控制信号通过can总线传输给平台控制器,结合比例阀的最小最大电流值范围输出其pwm电流值,采用pwm电路闭环控制方式输出至平台调平比例阀,实现调平功能。
6.进一步的,所述调平控制策略采用了开环调节方式加闭环调节方式。
7.进一步的,所述开环调节方式包括以下步骤:根据不同动作的机械结构特点,建立动作开环曲线数据库;当臂车动作时,系统判断其动作类型,并结合需要判定的传感器信号,输入到动作开环曲线数据库,根据出当前动作的方向、速度、姿态,查询出平台需要动作的开环分享值。
8.进一步的,所述闭环调节方式包括以下步骤:根据目标角度与工作平台水平传感器实际反馈的角度信号差值,做pi调节;根据不同机构动作的惯性及机械结构的差异,建立一套动作调节参数库;当臂车动作时,根据出当前动作的方向、速度、姿态,选择标定好的闭环控制pi参数值。
9.进一步的,将所述开环调节方式和闭环调节方式进行叠加,对平台的调平比例阀
进行控制,实现平台的动态及静态的调平控制。
10.进一步的,基于平台调平控制策略图,所述臂车动作分为大臂上升、大臂下降、大臂伸缩、转台回转、行走五种工况。
11.进一步的,在臂车运动中,在开环调节方式中通过机械结构原理的尺寸,计算出大臂提升时,大臂油缸与平台调平油缸运动的耦合关系。
12.进一步的,由于液压系统的供油及机械结构设计并非完全的线性关系,在理论计算的基础上,现场标定了在不同角度情况下的开关速度耦合曲线;将该曲线作为调平曲线(大臂)存储在底盘控制器失电保存区域。
13.进一步的,在闭环部分,控制系统通过can总线采集了安装在工作平台上的水平传感器信号,与目标角度进行比较,目标角度由用户在小角度范围内设定,并非绝对零度;将偏差送入pi控制模块进行调节;
14.进一步的,将工况写入匹配该动作闭环调节的p1、p2、i1、i2、 i3、i4等四个参数;将开环与闭环控制信号分量进行叠加,将控制信号处理成正负1000,分别对应向上及向下调平最大速度;最后在平台控制其中将结合比例阀的最小最大电流值范围输出其pwm电流值,对平台调平油缸进行控制。
15.与现有技术相比,本发明的有益之处在于:本发明采用了电子控制的方法实现了工作平台的调平功能;相比原液压调平系统,结构比较简明,省去原系统当中的液压补偿油缸及相关管路,同时不受臂车高度的限制;相比现有技术的电控调平,解决了其调平过程中调节过程反复波动问题以及最终无法调平而需要人为参与调平的现象,较好的实现了多个动作下自动调平的功能;增加了机器运行的安全性及作业效率。
附图说明
16.图1为本发明的结构示意图。
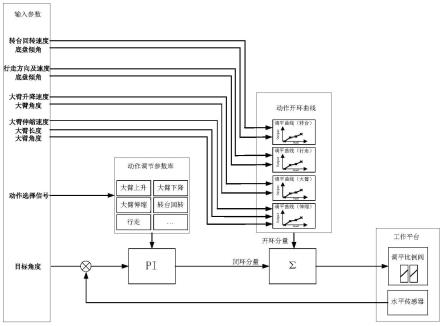
17.图2为本发明的平台调平控制策略图。
18.其中,1底盘控制器,2平台控制器,3角度长度传感器,4平台水平传感器,5底盘水平传感器。
具体实施方式
19.如图1-2所示,一种臂式高空作业车工作台自动调平方法,包括安装在底盘的底盘控制器1,安装在平台上的平台控制器2,双通道平台水平传感器3,大臂上的角度长度传感器4,和底盘的水平传感器5组成;
20.底盘控制器1通过can总线采集大臂角度长度传感器,平台水平传感器4和底盘水平传感器3的信号;经过调平控制策略,将需要输出控制信号通过can总线传输给平台控制器2,结合比例阀的最小最大电流值范围输出其pwm电流值,采用pwm电路闭环控制方式输出至平台调平比例阀,实现调平功能。
21.上述调平控制策略采用了开环调节方式加闭环调节方式。
22.上述开环调节方式包括以下步骤:根据不同动作的机械结构特点,建立动作开环曲线数据库;当臂车动作时,系统判断其动作类型,并结合需要判定的传感器信号,输入到动作开环曲线数据库,根据出当前动作的方向、速度、姿态,查询出平台需要动作的开环分
享值。
23.闭环调节方式包括以下步骤:根据目标角度与工作平台水平传感器实际反馈的角度信号差值,做pi调节;根据不同机构动作的惯性及机械结构的差异,建立一套动作调节参数库;当臂车动作时,根据出当前动作的方向、速度、姿态,选择标定好的闭环控制pi参数值。
24.将开环调节方式和闭环调节方式进行叠加,对平台的调平比例阀进行控制,实现平台的动态及静态的调平控制。
25.基于平台调平控制策略图,臂车动作分为大臂上升、大臂下降、大臂伸缩、转台回转、行走五种工况。
26.在臂车运动中,在开环调节方式中通过机械结构原理的尺寸,计算出大臂提升时,大臂油缸与平台调平油缸运动的耦合关系。
27.由于液压系统的供油及机械结构设计并非完全的线性关系,在理论计算的基础上,现场标定了在不同角度情况下的开关速度耦合曲线;将该曲线作为调平曲线(大臂)存储在底盘控制器失电保存区域。
28.在闭环部分,控制系统通过can总线采集了安装在工作平台上的水平传感器信号,与目标角度进行比较,目标角度由用户在小角度范围内设定,并非绝对零度;将偏差送入pi控制模块进行调节;
29.将工况写入匹配该动作闭环调节的p1、p2、i1、i2、i3、i4等四个参数;将开环与闭环控制信号分量进行叠加,将控制信号处理成正负1000,分别对应向上及向下调平最大速度;最后在平台控制其中将结合比例阀的最小最大电流值范围输出其pwm电流值,对平台调平油缸进行控制。
30.本发明并不局限于上述实施例,在本发明公开的技术方案的基础上,本领域的技术人员根据所公开的技术内容,不需要创造性的劳动就可以对其中的一些技术特征作出一些替换和变形,这些替换和变形均在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1