一种轴类零部件升降装置的控制系统及控制方法与流程
本发明属于轴类零部件升降控制领域,涉及一种轴类零部件升降装置的控制系统及控制方法。
背景技术:
1、升降装置广泛用于冶金、轻工、电力、化工、矿山、煤炭等行业中,其作用是在特殊工况之下,实现轴类零部件同步升降。
2、为了实现这一功能,升降装置都需要驱动部分,现有的驱动主要有以下三种。第一种是驱动和轴类零部件刚性连接,升降传动时,要么电机减速机等部件必须随动,并且磨损后轴类零部件的同步误差无法补偿;要么为了避免电机减速机等部件随动,采用链条传动等柔性传动部件,链条总长度远远大于主从两个链轮的中心距,然后再采用张紧装置对链条部件进行张紧,当轴类零部件需要被升降传动时,必须对张紧装置进行拆卸,从而导致不能对轴类零部件的升降与传动同步进行。第二种一般采用传统的气缸进行驱动:采用气缸,还需要为气缸单独配置气动系统,而且升降动作僵硬,同步性差,不能实现升降传动过程中任意位置的停位功能;第三种采用传统的阀控以及液压缸,则需要配置液压站、阀门、阀块等液压系统元器件,而且还有土建和配管等施工作业。
3、综上所述,现有传动升降装置存在同步性、协调性差,机构系统过于复杂,故障点多,稳定性差,施工检修维护工作量大等不足之处,给生产运营带来诸多困难。
4、随着液压伺服技术的不断发展,出现了一种新型的电液直驱驱动装置。公开号为cn111853205a的专利公开了一种用于轴类零部件的升降传动装置。而在轴类零部件升降传动过程中,需要控制驱动装置中的液压缸按照给定位置动作,控制性能的好坏直接影响轴类零部件升降传动的同步性、稳定性和轴类零部件的使用寿命,甚至出现卡死现象。
5、公开号为cn110848189a的专利公开了一种多两级缸液压同步控制方法,该方法基于一种多两级缸液压同步控制系统实现,该系统包括控制单元模块、液压单元模块、执行单元模块。控制单元模块用于控制液压单元模块中的液压阀的启闭,以及采集执行单元模块中的传感器数据;液压单元模块与执行单元模块连接,用于通过控制单元模块的控制指令,实现执行单元模块的运动;执行单元模块用于在控制单元模块控制下实现同步升降运动。控制单元模块包括遥控器、可编程控制器,通讯扩展模块、模拟量输出模块以及比例放大器。遥控器与可编程控制器相连,用于给可编程控制器发送运动指令,包括执行单元模块的上升和下降运动;可编程控制器与通讯扩展模块以及模拟量输出模块连接,可编程控制器用于通过解析遥控器的动作指令,计算移动设备agv升降平台的升降速度,然后根据液压单元模块中液压阀的参数特性,换算出液压单元模块中液压阀开启所需的电压值得到电压控制信号并发送至模拟量输出模块;可编程控制器还用于从执行单元模块的多组液压缸选取一个基准液压缸,计算出另外几个液压缸与基准液压缸的位置误差,并计算出非基准液压缸的流量补偿量,通过计算流量补偿量下发的电压补偿量控制信号并发送至模拟量输出模块;通讯扩展模块用于读取执行单元模块中传感器的位移数据;模拟量输出模块用于实现输出连续的电压控制信号以及连续的电压补偿量控制信号,并传递至所述比例放大器,模拟量输出模块的点位输出与比例放大器的数量一致;比例放大器用于通过比例换算把从所述模拟量输出模块获取的电压控制信号、电压补偿量控制信号分别转换成液压单元模块中液压阀的电流控制信号、电流补偿量控制信号,以实现控制液压单元模块中的液压阀;液压单元模块中液压阀由电流补偿量控制信号与由遥控器下发的动作指令所转换成的电流控制信号共同控制。由此可以看出,该专利的控制方法是将电压信号转换为电流信号,然后实现多缸直接的共同控制。但是该控制方法属于传统液压阀控技术,首先需要配置液压站,就必须有大量的土建和配管等施工作业,同时也存在卡阀等现象。
6、因此,亟需一种同步性高、稳定可靠、功能多样的电液直驱缸驱动轴类零部件升降装置的控制系统及控制方法。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种同步性高、稳定可靠、功能多样的电液直驱缸驱动轴类零部件升降装置的控制系统及控制方法。
2、为达到上述目的,本发明提供如下技术方案:
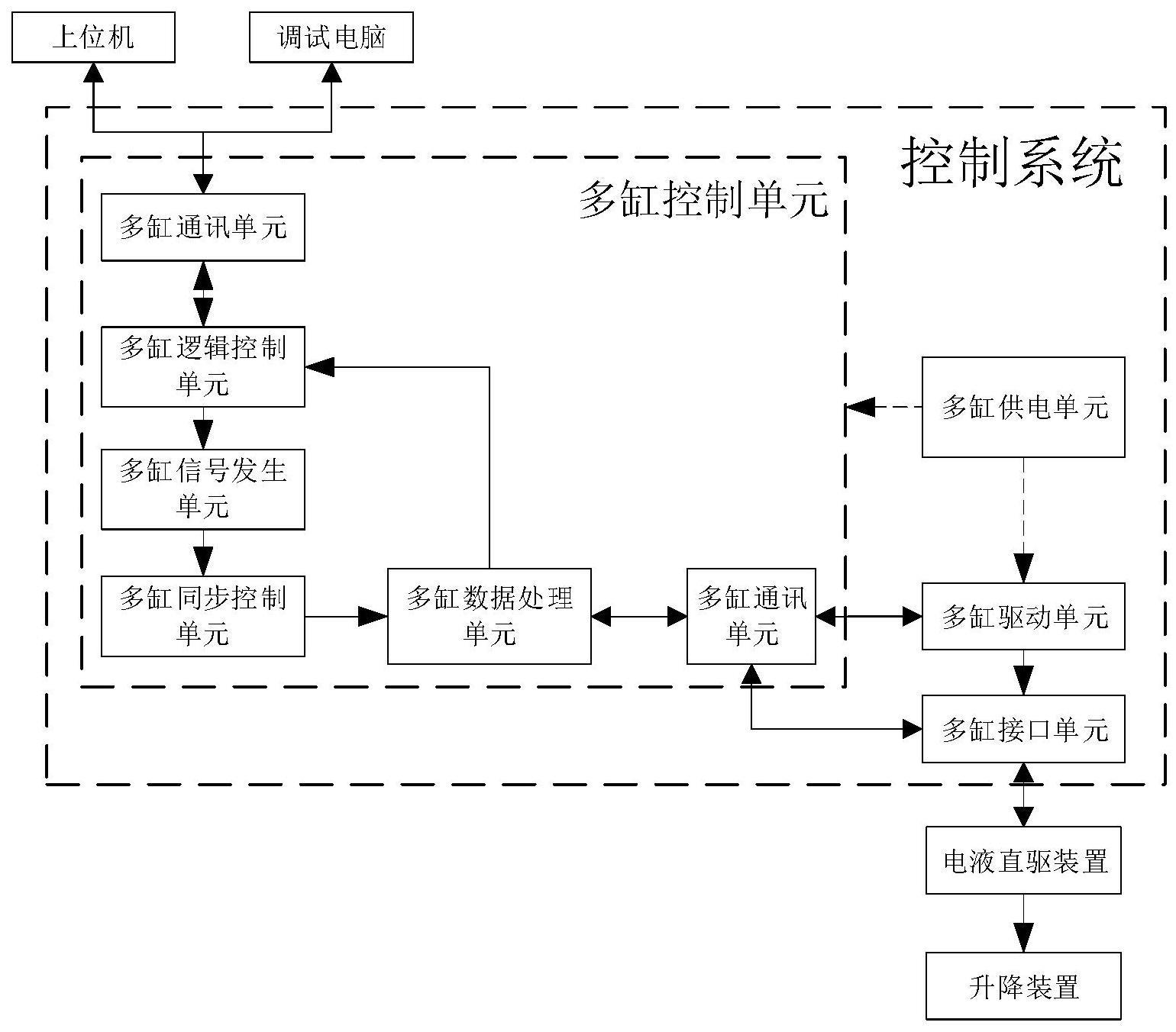
3、方案一:一种轴类零部件升降装置的控制系统,包括多缸控制单元、多缸驱动单元、多缸供电单元和多缸接口单元;所述多缸驱动单元与多缸接口单元信号连接,与多缸供电单元电连接;所述多缸接口单元与电液直驱装置信号连接;所述多缸控制单元与多缸驱动单元信号连接,与多缸供电单元电连接;所述多缸控制单元用于控制电液直驱装置的换向、调速、调压或调转矩功能,最终控制轴类零部件升降装置的动作,实现同步升降。
4、进一步,所述多缸控制单元包括多缸逻辑控制单元、多缸信号发生单元、多缸同步控制单元、多缸数据处理单元和多缸通讯单元;
5、所述多缸逻辑控制单元、多缸信号发生单元、多缸同步控制单元、多缸数据处理单元依次信号连接形成闭环;所述多缸通讯单元分别与多缸数据处理单元、多缸供电单元和多缸接口单元信号连接。
6、进一步,所述多缸逻辑控制单元用于对电液直驱装置的状态反馈信号和上位机信号进行逻辑运算,然后将运算结果通过多缸信号发生单元处理后发送给多缸同步控制单元来实现连锁控制。
7、进一步,所述电液直驱装置的状态反馈信号依次通过多缸接口单元、多缸通讯单元和多缸数据处理单元发送到多缸逻辑控制单元。
8、进一步,所述多缸信号发生单元用于接收多缸逻辑控制单元发出的运算结果信号,该信号包括阶跃信号、斜坡信号或方波信号,该信号经多缸信号发生单元处理后发送给多缸同步控制单元。
9、进一步,对所述阶跃信号的处理包括对阶跃量的任意指定和在线修改;对所述斜坡信号的处理包括对斜率和目标位置的任意指定和在线修改;对所述方波信号的处理包括对方波的幅值以及周期的任意指定和在线修改。
10、进一步,所述多缸同步控制单元用于接收多缸信号发生单元处理后的信号,实现对轴类零部件的同步升降控制;其中,多缸同步控制指多个液压缸按照多缸信号发生单元给定的信号驱动轴类零部件升降装置,实现同步升降。
11、进一步,所述多缸数据处理单元用于对电液直驱装置的数字量信号的输入输出处理以及对模拟量信号的输入输出处理;其中,对模拟量信号的输入处理包括对信号的模数转换以及电气信号到物理信号的转换;对模拟量信号的输出处理包括对信号的物理信号到电气信号的转换以及数模转换。
12、进一步,所述多缸通讯单元用于控制系统的内部通讯和外部通讯;其中,内部通讯包括多缸控制单元与驱动单元之间的通讯,所述通讯方式包括采用ethercat通讯、485串口通讯以及硬接线方式;外部通讯包括多缸控制单元与调试电脑之间的通讯以及多缸控制单元与上位机之间的通讯,通讯方式均采用以太网通讯,通过超五类网线连接。
13、方案二:
14、一种轴类零部件升降装置的控制方法,包括多缸的升降同步控制方法以及多缸故障检测方法,在上述控制系统的多缸控制单元中实现。
15、进一步,所述多缸的升降同步控制方法包括线性速度拟合方法与闭环同步补偿方法,即多缸的升降同步控制量为:
16、sn(t)=vns*sni(t)+pn(t)
17、其中,sn(t)表示t时刻电机的转速给定,vns表示n缸的升降速度,sni(t)表示t时刻电机的拟合转速给定;pn(t)表示t时刻闭环同步补偿的电机转速给定。
18、进一步,所述线性速度拟合方法具体为:
19、1)n缸的升降速度vns即升降装置升降时上位机指定的速度;
20、2)t时刻电机的拟合转速给定sni(t)是通过离线的单缸升降速度对应的实际电机转速的均值。
21、进一步,所述闭环同步补偿方法具体为:
22、1)为了实现多缸升降的同步并且电液直驱装置按照上位机指定的速度动作,给升降装置拟定一条目标位置曲线,上升下降曲线不同,首先上升时:
23、
24、其中,ysu(t)表示t时刻升降装置上升的目标位置;vsu表示升降装置上升时上位机指定的速度;yw表示升降装置的工作位置;
25、2)而不同液压缸升降前的初始位置是不完全相同的,为了补偿初始位置的差异,需要重新计算任意液压缸的升降给定位置曲线,并且补偿多缸传动间元器件的性能差异,以保证多缸的同步升降。任意液压缸的上升时给定位置曲线:
26、
27、其中,ynu(t)表示t时刻n缸上升时给定位置;vnu(t)表示t时刻n缸上升时给定速度,表达式为:
28、
29、其中,m表示给定速度的平滑权值;vsnu表示n缸上升时拟定的目标速度,表达式为:
30、
31、其中,yn(0)表示n缸初始时刻的位置,ymax(0)表示n个缸初始时刻的位置的最大值。
32、3)升降装置下降时:
33、
34、其中,ysd(t)表示t时刻升降装置下降的目标位置,vsd表示升降装置下降时上位机指定的速度。
35、4)而任意液压缸的下降时给定位置曲线:
36、
37、其中,ynd(t)表示t时刻n缸下降时给定位置,vnd(t)表示t时刻n缸下降时给定速度,表达式为:
38、
39、其中,vsnd表示n缸下降时拟定的目标速度,表达式为:
40、
41、其中,vsd表示升降装置下降时上位机指定的速度,ymin(0)表示n个缸初始时刻的位置的最小值。
42、5)pn(t)通过拟定的n缸目标位置与n缸实际位置,采用闭环控制算法得到。
43、进一步,所述多缸故障检测方法具体为:多缸元器件存在差异以及使用寿命不同,可以通过检测的压力、位置以及电机转速给定与单缸目标位置和电机额定转速之间的关系等条件来判断升降装置的多缸故障。
44、本发明的有益效果在于:
45、1)本发明控制系统与上位机连锁控制,既可以通过上位机系统控制给定的指令信号,控制电液直驱装置的多缸同步升降,最终实现轴类零部件升降装置同步升降,也可以将轴类零部件升降装置的实时状态反馈给上位机系统。
46、2)本发明方便对电液直驱装置的有效控制,包括换向、调速、调压、调转矩功能。
47、3)本发明可以通过数据处理单元,监控电液直驱装置的健康状况,实现装置的故障自诊断,提前预警装置故障,从而减少轴类零部件意外停机,提高作业率。
48、4)本发明可以控制轴类零部件定速同步升降,控制轴类零部件的推力大,冲击小,减小轴类零部件的磨损,提高轴类零部件的使用寿命。
49、5)本发明可以在满足定速同步升降的前提下,有效降低装机负荷,减小用电负荷以及装置外形尺寸。
50、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!