一种风扇转动位置的确定方法、装置及风扇转动系统与流程
本发明涉及电器设备领域,具体涉及一种风扇转动位置的确定方法、装置及风扇转动系统。
背景技术:
1、现阶段,人们的生活节奏越来越快,用户对时间、效率的要求也越来越严格,一个好的产品,需要满足用户各方面的需求。现有的风扇产品,大多数采用步进电机、同步电机进行摇头驱动,而摇头角度一般采用步进电机计数的方式进行控制,在风扇摇头的控制过程中,首先需要找寻当前位置。这是因为,在风扇摇头的控制过程中,只有知道风扇转动装置(例如风扇的头部)的当前位置,才能快速的将风扇转动装置驱动到目标位置。
2、例如,风扇需要回到默认位置(例如正前方),如果回正时间较长,则用户等待时间较长,体验感不好。为了快速的回正,首先需要知道当前位置,进一步才能判断如何进行回正时间最短。再例如,用户设定摇头角度后,想要以最短的时间进入设定的摇头角度范围,也需要知道当前位置。
3、为了获取风扇转动装置的当前位置,相关技术中常采用固定位置检测方法,具体的,在几个固定位置设置检测装置,当风扇转动装置转动至该位置后,输出信号到控制器,但在风扇转动装置没有转动到该位置时,则无法确定转动装置的位置。由此可见,固定位置检测方法在确定出当前位置之前,需要转动装置先进行旋转,而旋转有两个方向,因为转动装置的当前位置是未知的,因此无法确定朝哪个方向旋转用时更短。也就是说,固定位置检测方法无法即时的确定转动装置的当前位置,耗时较长,用户体验差。
技术实现思路
1、有鉴于此,本发明提供了一种风扇转动位置的确定方法、装置及风扇转动系统,以解决无法即时的确定风扇转动装置的当前位置的问题。
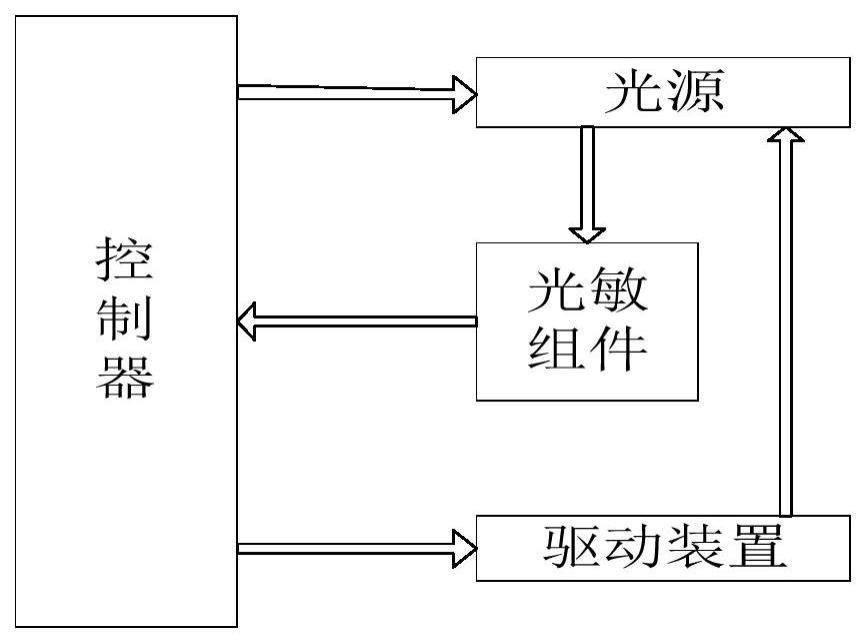
2、第一方面,本发明实施例提供了一种风扇转动系统,包括转动装置、驱动装置、光源、光敏组件和控制器;驱动装置用于驱动转动装置进行转动;光源设置在转动装置的转动轨迹上,且与转动装置同步转动;光敏组件设置在第一位置,其中第一位置与转动轨迹上每个点的距离均不相同;控制器与驱动装置、光源和光敏组件通讯连接。
3、这是因为,光敏组件对光源发出的光具有敏感性,能够获取光源发出的光强信号。由于光敏组件所在的第一位置与转动轨迹上每个点的距离均不相同,而光敏元件获取到的光强信号跟光源与光敏元件之间的距离有关,因此当光源沿着转动轨迹运动时,光敏元件获取到的光强信号均不相同。基于此,本发明实施例提供的风扇转动系统可以根据光敏元件获取到的光强信号来反推光敏元件与光源之间的距离,进一步可以得到光敏元件的当前位置。由于光源与转动装置是同步转动的,得到光源的当前位置也就得到了转动装置的当前位置。与相关技术中利用固定位置检测确定转动装置的当前位置相比,本发明实施例提供的风扇转动系统可以即时的确定转动装置的当前位置,降低了当前位置的确定时间,提高了当前位置的确定效率。
4、在一种可选的实施方式中,第一位置为转动轨迹所在的圆的对称轴上除圆与对称轴的交点之外的任意位置。
5、这是因为,在得到光敏元件与光源之间的距离后,有些情况下需要利用几何关系来确定光敏元件的当前位置,当第一位置位于转动轨迹所在的圆的对称轴上除圆与对称轴的交点之外的任意位置时,可以比较简单的确定光敏元件的当前位置。
6、在一种可选的实施方式中,第一位置在圆的直径上。
7、由此可以比较简单的确定光敏元件的当前位置。
8、在一种可选的实施方式中,第一位置为除圆的圆心之外的任意位置。
9、由此在风扇的转动角度大于90°小于等于180°的情况下,避免出现转动轨迹上存在两点到光敏元件的距离相同的情况,使得风扇转动系统在风扇的转动角度大于90°小于等于180°的情况下,也能准确的确定转动装置的当前位置。
10、在一种可选的实施方式中,风扇转动系统还包括,设置在直径上的透光组件。
11、由此在风扇的转动角度大于180°小于等于360°的情况下,避免出现转动轨迹上存在两点到光敏元件的距离相同的情况,使得风扇转动系统在风扇的转动角度大于180°小于等于360°的情况下,也能准确的确定转动装置的当前位置。
12、第二方面,本发明实施例还提供了一种风扇转动位置的确定方法,风扇包括转动装置、驱动装置、光源和光敏组件;驱动装置用于驱动转动装置进行转动;光源设置在转动装置的转动轨迹上,且与转动装置同步转动;光敏组件设置在第一位置,其中第一位置与转动轨迹上每个点的距离均不相同,风扇转动位置的确定方法包括以下步骤:获取光敏组件检测到的光强信号;根据光强信号确定转动装置的当前位置。
13、本发明实施例提供的风扇转动控制方法,通过获取光敏组件检测到的光强信号,可以确定转动装置的当前位置。与相关技术中利用固定位置检测方法确定转动装置的当前位置相比,本发明实施例可以即时的确定转动装置的当前位置,降低了当前位置的确定时间,提高了当前位置的确定效率。
14、在一种可选的实施方式中,根据光强信号确定转动装置的当前位置包括:根据光强信号确定光敏组件与光源之间的距离;根据光敏组件与光源之间的距离确定转动装置的当前位置。
15、由此可以方便快速的确定转动装置的当前位置。
16、在一种可选的实施方式中,根据光强信号确定光敏组件与光源之间的距离包括:根据光强信号,利用预设的光强与距离的计算公式确定光敏组件与光源之间的距离。
17、由此可以方便快速的确定转动装置的当前位置。
18、在一种可选的实施方式中,根据光敏组件与光源之间的距离确定转动装置的当前位置包括:获取预设的距离与转动角度之间的对应关系;根据光敏组件与光源之间的距离、及距离与转动角度之间的对应关系得到转动装置的当前位置;或者;获取预设的距离与转动角度的计算公式;根据光敏组件与光源之间的距离、及距离与转动角度的计算公式得到转动装置的当前位置。
19、由此可以方便快速的确定转动装置的当前位置。
20、第三方面,本发明实施例提供了一种风扇转动位置的确定装置,风扇包括转动装置、驱动装置、光源和光敏组件;驱动装置用于驱动转动装置进行转动;光源设置在转动装置的转动轨迹上,且与转动装置同步转动;光敏组件设置在第一位置,其中第一位置与转动轨迹上每个点的距离均不相同,风扇转动位置的确定装置包括获取模块和处理模块,获取模块用于获取光敏组件检测到的光强信号;处理模块用于根据光强信号确定转动装置的当前位置。
21、第四方面,本发明实施例还提供了一种计算机设备,包括存储器和处理器,存储器和处理器之间互相通信连接,存储器中存储有计算机指令,处理器通过执行计算机指令,从而执行上述第一方面或其对应的任一实施方式的风扇转动位置的确定方法。
22、第五方面,本发明实施例还提供了一种风扇,包括第四方面的计算机设备。
23、第六方面,本发明实施例还提供了一种计算机可读存储介质,计算机可读存储介质上存储有计算机指令,计算机指令用于使计算机执行上述第一方面或其对应的任一实施方式的风扇转动位置的确定方法。
技术特征:
1.一种风扇转动系统,其特征在于,包括:
2.根据权利要求1所述的风扇转动系统,其特征在于,所述第一位置为所述转动轨迹所在的圆的对称轴上除所述圆与所述对称轴的交点之外的任意位置。
3.根据权利要求2所述的风扇转动系统,其特征在于,所述第一位置在所述圆的直径上。
4.根据权利要求3所述的风扇转动系统,其特征在于,所述第一位置为除所述圆的圆心之外的任意位置。
5.根据权利要求3或4所述的风扇转动系统,其特征在于,还包括:
6.一种风扇转动位置的确定方法,其特征在于,风扇包括转动装置、驱动装置、光源和光敏组件;所述驱动装置用于驱动所述转动装置进行转动;所述光源设置在所述转动装置的转动轨迹上,且与所述转动装置同步转动;所述光敏组件设置在第一位置,其中所述第一位置与所述转动轨迹上每个点的距离均不相同,所述风扇转动位置的确定方法包括:
7.根据权利要求6所述的方法,其特征在于,所述根据所述光强信号确定所述转动装置的当前位置包括:
8.根据权利要求7所述的方法,其特征在于,所述根据所述光强信号确定所述光敏组件与所述光源之间的距离包括:
9.根据权利要求7所述的方法,其特征在于,所述根据所述光敏组件与所述光源之间的距离确定所述转动装置的当前位置包括:
10.一种风扇转动位置的确定装置,其特征在于,风扇包括转动装置、驱动装置、光源和光敏组件;所述驱动装置用于驱动所述转动装置进行转动;所述光源设置在所述转动装置的转动轨迹上,且与所述转动装置同步转动;所述光敏组件设置在第一位置,其中所述第一位置与所述转动轨迹上每个点的距离均不相同,所述风扇转动位置的确定装置包括:
11.一种计算机设备,其特征在于,包括:
12.一种风扇,其特征在于,包括权利要求11所述的计算机设备。
13.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机指令,所述计算机指令用于使计算机执行权利要求6至9中任一项所述的风扇转动位置的确定方法。
技术总结
本发明涉及电器设备技术领域,公开了一种风扇转动位置的确定方法、装置及风扇转动系统,其中风扇转动系统包括转动装置、驱动装置、光源、光敏组件和控制器;驱动装置用于驱动转动装置进行转动;光源设置在转动装置的转动轨迹上,且与转动装置同步转动;光敏组件设置在第一位置,其中第一位置与转动轨迹上每个点的距离均不相同;控制器与驱动装置、光源和光敏组件通讯连接。与相关技术中利用固定位置检测确定转动装置的当前位置相比,本发明实施例提供的风扇转动系统可以即时的确定转动装置的当前位置,降低了当前位置的确定时间,提高了当前位置的确定效率。
技术研发人员:张君明,敬仕林,贾根基,陈青青,许振群,苏勇健
受保护的技术使用者:珠海格力电器股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!