一种液压系统中压力控制阀的压力控制方法及系统与流程
本发明涉及液压控制阀,尤其是涉及一种液压系统中压力控制阀的压力控制方法及系统。
背景技术:
1、液压系统是一种利用液体(通常是油)来传递能量和执行工程任务的技术。这种系统通常由液压液体、泵、阀门、缸、马达和管道等组件组成。液压系统基于帕斯卡定律,该定律规定了液体在封闭容器中传递压力的原理。通过调整泵、阀门和执行器的操作,可以实现不同类型的运动和力的控制,使液压系统在各种应用中广泛使用,包括工业机械、建筑设备、汽车制造、航空航天等领域。这些系统通常具有高效性、可靠性和精确性,因此在许多工程领域中非常重要。
2、液压系统中的压力控制阀是一种关键组件,用于维持或调整系统中的液压压力。它们通常用于确保系统操作在安全的压力范围内,以防止损坏系统元件或发生危险情况。液压控制阀的压力控制方法是通过控制阀门的开度或工作状态来调整液压系统中的压力,以满足特定应用的要求。
3、现有技术中的压力控制阀通常采用不同的方法来控制液压系统中的压力,存在一系列有待优化的不足,例如一些传统的压力控制阀在控制精度方面受到限制,特别是在需要高度精确控制的应用中,这可能导致系统无法满足严格的性能要求;压力控制阀的响应时间可能较长,意味着在系统发生压力变化时可能需要一些时间才能达到稳态,会降低系统的动态性能。传统的压力控制阀通常是基于开关式控制的,它们将流体完全阻断或完全允许通过,会导致在流体开关之间的过渡期间能量浪费。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种液压系统中压力控制阀的压力控制方法及系统。
2、第一方面,本发明提供了一种液压系统中压力控制阀的压力控制方法,该方法包括以下步骤:
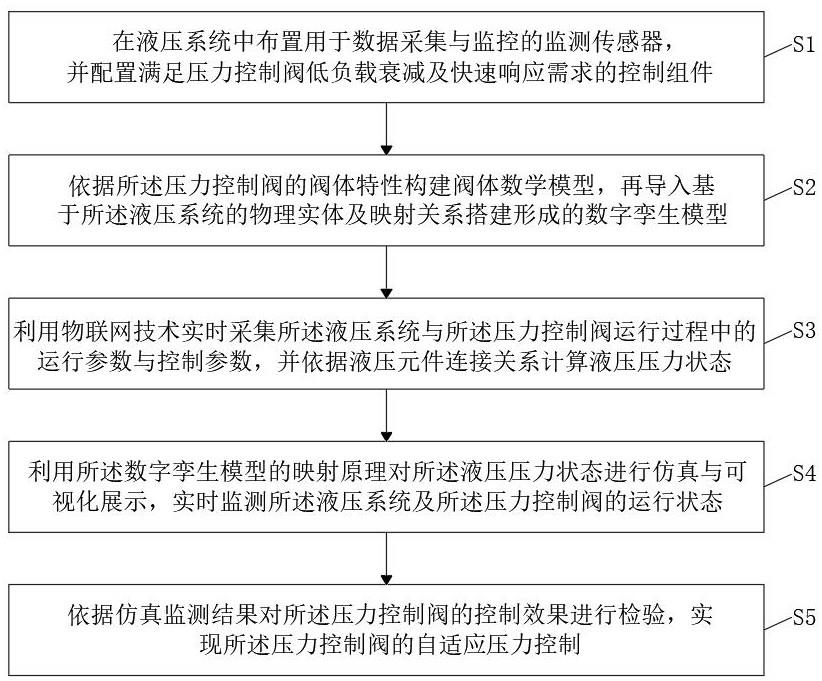
3、s1、在液压系统中布置用于数据采集与监控的监测传感器,并配置满足压力控制阀低负载衰减及快速响应需求的控制组件;
4、s2、依据压力控制阀的阀体特性构建阀体数学模型,再导入基于液压系统的物理实体及映射关系搭建形成的数字孪生模型;
5、s3、利用物联网技术实时采集液压系统与压力控制阀运行过程中的运行参数与控制参数,并依据液压元件连接关系计算液压压力状态;
6、s4、利用数字孪生模型的映射原理对液压压力状态进行仿真与可视化展示,实时监测液压系统及压力控制阀的运行状态;
7、s5、依据仿真监测结果对压力控制阀的控制效果进行检验,实现压力控制阀的自适应压力控制。
8、进一步的,在液压系统中布置用于数据采集与监控的监测传感器,并配置满足压力控制阀低负载衰减及快速响应需求的控制组件包括以下步骤:
9、s11、在液压系统中管道、液压元件及压力控制阀中布置监测传感器,监测传感器包括压力传感器、流量传感器、位移传感器及阀体传感器;
10、s12、对于电磁驱动类型的压力控制阀,配置基于提前控制机制的控制组件,满足该压力控制阀的低负载衰减及快速响应需求。
11、进一步的,对于电磁驱动类型的压力控制阀,配置基于提前控制机制的控制组件,满足该压力控制阀的低负载衰减及快速响应需求包括以下步骤:
12、s121、对于电磁驱动类型的压力控制阀,利用高频pwm进行控制驱动,采用固态继电器作为无触点开关,构建压力控制阀的驱动电路,利用固态继电器控制阀芯高速动作来减小压力控制阀的响应时间;
13、s122、采用高频大电流二极管作为续流二极管,进一步降低响应时间;
14、s123、设定采样电阻,实时采集压力控制阀控制驱动过程产生的电压信号、电流信号、供电电源电压及阀芯控制信号;
15、s124、设定压力控制阀的控制周期,减少压力控制阀在控制过程中阀芯位移时间,作为提前控制机制用于补偿压力控制阀控制过程中存在的滞后时间,结合压力控制阀及其驱动电路形成控制组件。
16、进一步的,依据压力控制阀的阀体特性构建阀体数学模型,再导入基于液压系统的物理实体及映射关系搭建形成的数字孪生模型包括以下步骤:
17、s21、获取压力控制阀的阀体特性,依据压力控制阀内部电磁力、液动力及弹簧弹力之间的数学关系,建立阀体数学模型;
18、s22、根据液压系统的物理实体构建液压元件库,再基于液压系统运行原理,利用液压元件库搭建线上液压系统作为数字孪生模型,并按照液压系统内的各类型元件参数为线上液压系统定义属性;
19、s23、将阀体数学模型导入线上液压系统中控制压力控制阀;
20、s24、将监测传感器与线上液压系统中对应节点进行映射配置,以监测传感器和实际数据驱动线上液压系统运行。
21、进一步的,获取压力控制阀的阀体特性,依据压力控制阀内部电磁力、液动力及弹簧弹力之间的数学关系,建立阀体数学模型包括以下步骤:
22、s211、获取由压力控制阀机械结构参数、电磁线圈参数、阀体压力参数及弹簧弹力参数组成的阀体特性;
23、s212、依据电磁线圈参数及电磁学理论建立电磁力学模型;
24、s213、依据阀体压力参数及质量守恒定律建立液动力控制模型;
25、s214、依据弹簧弹力参数及胡克定律建立弹簧弹力模型;
26、其中,弹簧弹力模型的表达式为:;
27、式中, f k表示压力控制阀中回位弹簧提供的弹簧弹力; f 0表示压力控制阀中的弹簧的预紧力; k k表示压力控制阀中弹簧的刚度系数; z表示压力控制阀中阀芯的位移量;
28、s215、利用电磁力学模型、液动力控制模型及弹簧弹力模型输出的与阀芯位移运动相关的电磁力、液动力及弹簧弹力之间的数学关系,建立压力控制阀的阀体数学模型,阀体数学模型的表达式为:;
29、式中, d表示阀体数学模型; m表示压力控制阀中阀芯的质量; f m表示压力控制阀中阀芯受到的电磁力; f d表示压力控制阀中阀芯受到的液动力; f k表示压力控制阀中回位弹簧提供的弹簧弹力; c u表示压力控制阀内部的摩擦系数; z表示压力控制阀中阀芯的位移量。
30、进一步的,依据电磁线圈参数及电磁学理论建立电磁力学模型包括以下步骤:
31、s2121、提取电磁线圈参数中的电磁线圈匝数、主气隙磁阻及次气隙磁阻的数值,并实时检测电磁线圈中通过的实时线圈电流,优先计算实时线圈电流、电磁线圈匝数及校正系数的乘积,再除以主气隙磁阻与次气隙磁阻相加之和得到主气隙的磁通量;
32、s2122、获取压力控制阀内的真空磁导率及主气隙的横截面积;
33、s2123、利用实时线圈电流的变化,建立电磁力学模型实现压力控制阀内部电磁力的计算,电磁力学模型的表达式为:;
34、式中, f m表示压力控制阀中阀芯受到的电磁力; λ表示压力控制阀内主气隙的磁通量; i表示压力控制阀内的实时线圈电流; z表示压力控制阀内阀芯的位移量; μ 0表示压力控制阀内的真空磁导率; s 0表示压力控制阀内主气隙的横截面积。
35、进一步的,液动力控制模型的表达式为:
36、;
37、式中, f d表示压力控制阀中阀芯受到的液动力; c d表示压力控制阀的流量系数; c 1表示压力控制阀中的压力修正系数; a t表示压力控制阀中节流口的截面积; a 0表示压力控制阀中进油口的截面积; a 2表示压力控制阀中出口的截面积; a tw表示压力控制阀中节流面附近锥体的侧面积; α表示压力控制阀中阀座追角; η表示能量耗散系数;δ p表示压力控制阀入口与出口的压力差。
38、进一步的,利用物联网技术实时采集液压系统与压力控制阀运行过程中的运行参数与控制参数,并依据液压元件连接关系计算液压压力状态包括以下步骤:
39、s31、利用物联网技术读取监测传感器采集液压系统与压力控制阀运行过程中的运行参数与控制参数,依据各个监测传感器的绑定关系进行数据解析,将监测参数赋值至数字孪生模型中对应的元件参数;
40、s32、获取各个液压元件的物理计算公式,利用液压元件内部的初始参数和赋值参数作为输入,进行内部计算,已完成赋值的参数不参与计算,分别记录已计算出的元件参数和未计算出的元件参数;
41、s33、获取各个液压元件的连接关系,按照连接关系进行压力、流量、位移及电磁力信息的传递,更新已计算出的元件参数和未计算出的元件参数;
42、s34、根据更新的元件参数重复步骤s32与步骤s33,直至数字孪生模型中所有元件参数均计算出来,将此时线上液压系统所处的状态作为液压压力状态。
43、进一步的,依据仿真监测结果对压力控制阀的控制效果进行检验,实现压力控制阀的自适应压力控制包括以下步骤:
44、s51、依据仿真监测结果对压力控制阀的控制效果进行检验,若当前运行状态满足工作需求,则说明压力控制阀的控制效果符合要求;
45、s52、若当前运行状态不满足工作需求,则利用阀体数学模型对控制参数进行运算与调节,直至满足工作需求,实现压力控制阀的压力控制。
46、第二方面,本发明还提供了一种液压系统中压力控制阀的压力控制系统,该系统包括:液压系统监测模块、数字孪生模型模块、参数运算处理模块、虚拟仿真展示模块及检验调节控制模块;
47、其中,液压系统监测模块,用于利用监测传感器对液压系统进行数据采集与监控,并利用低负载衰减及快速响应的控制组件对液压控制阀进行控制;
48、数字孪生模型模块,用于依据压力控制阀的阀体特性构建阀体数学模型,并构建基于液压系统物理实体及映射关系搭建形成的数字孪生模型;
49、参数运算处理模块,用于实时采集液压系统与压力控制阀运行过程中的运行参数与控制参数,并依据液压元件连接关系计算液压压力状态;
50、虚拟仿真展示模块,用于利用数字孪生模型的映射原理对液压压力状态进行仿真与可视化展示,实时监测液压系统运行状态;
51、检验调节控制模块,用于依据仿真监测结果对压力控制阀的控制效果进行检验,实现压力控制阀的自适应压力控制。
52、本发明的有益效果:
53、1、通过整合监测传感器、数字孪生模型以及物联网技术,实现了液压系统的高精度压力控制,通过实时数据采集和数字孪生模型的仿真,系统能够更准确、快速地响应压力变化,从而满足复杂应用需求;其次,通过实时监测和可视化展示,操作员可以随时了解系统和控制阀的状态,快速发现问题并采取适当措施,提高了系统的稳定性和可靠性;而自适应压力控制使系统能够在不同工况下实现优化控制,减少能源浪费,降低运行成本,促进资源的有效利用,进而提高液压系统的性能、可控性和资源利用效率。
54、2、通过对电磁驱动类型的压力控制阀,采用基于提前控制机制的控制组件,通过高频pwm控制驱动、无触点开关、固态继电器、高频大电流二极管等先进技术,显著减小了压力控制阀的响应时间,实现了快速响应需求;此外,通过设定采样电阻和控制周期,实时采集信号并补偿滞后时间,进一步提高了系统的控制精度和性能。
- 还没有人留言评论。精彩留言会获得点赞!