一种大型管桩挠度修正的液压转体系统及其转体方法与流程
本发明属于远海风电承载基础建造,具体涉及一种大型管桩挠度修正的液压转体系统及其转体方法。
背景技术:
1、随着深远海风电场的开发,作为风电机组安装运行重要承载基础的管桩,朝着大型化发展是必然的趋势。大型管桩的转体施工工艺是保证建造质量和提高移运水平的不可或缺的一个重要环节。大型管桩的转体是一个动态过程,转体过程中需要对转速和挠度进行严格控制,以避免不平衡状态和较大的形变,确保管桩的质量要求。因此,需要对转体姿态进行实时监测,实时掌握转体速度和形变等关键参数,及时采取相应措施以避免不利的情况出现,确保管桩的结构安全性和转体施工的顺利实施。目前大型管桩转体监测技术较少,更缺乏对关键部位的监测数据和相应的监控方法。同时,传统的转体系统的结构组成过于复杂,需要耗费大量的人力物力成本,且操作过程繁琐,不利于高频次的广泛使用。传统的转体系统一般由转盘、球铰、滑道、牵引系统等组成,转体运动常通过连续千斤顶对拉牵引索,形成旋转力偶实现。由于惯性的存在,传统转体方式的定位准确度较差。
技术实现思路
1、本发明的目的是为了克服以上的不足,提供一种大型管桩挠度修正的液压转体系统,可有效保证转体的转动速度可控,避免管桩左、右两端挠度变形超限,保证管桩结构的安全性,提高转体自动控制水平,节省人力物力成本。
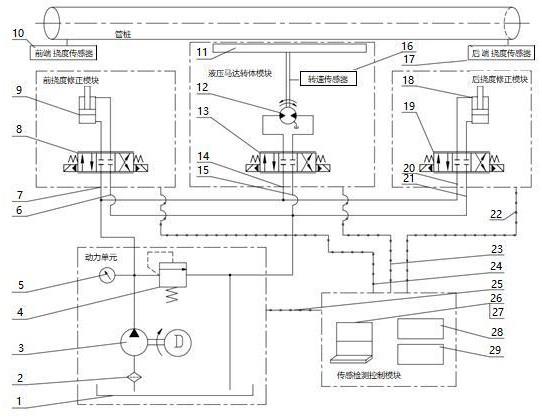
2、本发明的目的通过以下技术方案来实现:一种大型管桩挠度修正的液压转体系统,包括液压马达转体模块、前挠度修正模块、后挠度修正模块、动力模块以及传感检测控制模块;
3、动力模块为液压马达转体模块、前挠度修正模块以及后挠度修正模块提供电力驱动;
4、传感检测控制模块为动力模块提供电力,并控制动力模块的启停;传感检测控制模块分别或同时向前挠度修正模块、后挠度修正模块提供电力并分别或同时控制前挠度修正模块、后挠度修正模块的工作状态;传感检测控制模块为液压马达转体模块提供电力并控制液压马达转体模块的工作状态。
5、本发明的进一步改进在于:液压马达转体模块包括转盘、液压马达、转体电液伺服阀、进油液压管路一、回油液压管路一、信号电力传输电缆一,液压马达的驱动轴与转盘连接并带动转盘转动,转体电液伺服阀与液压马达通过液压管路连接,转体电液伺服阀与信号电力传输电缆一电性连接。
6、本发明的进一步改进在于:前挠度修正模块包括前修正电液伺服阀、前修正液压缸、进油液压管路二、回油液压管路二以及信号电力传输电缆二,前修正电液伺服阀与前修正液压缸通过液压管路连接,前修正电液伺服阀与信号电力传输电缆二电性连接,前挠度修正模块的中部安装竖直设置的前修正液压缸,前修正液压缸的活塞杆顶部具有球铰,球铰上面安装对管桩前侧进行挠度修正的弧形修正板。
7、本发明的进一步改进在于:后挠度修正模块包括后修正液压缸、后修正电液伺服阀、进油液压管路三、回油液压管路、信号电力传输电缆三,后修正电液伺服阀与后修正液压缸通过液压管路连接,后修正电液伺服阀与信号电力传输电缆三电性连接,后挠度修正模块的中部安装竖直设置的后修正液压缸,后修正液压缸的活塞杆顶部具有球铰,球铰上面安装对管桩后侧进行挠度修正的弧形修正板。
8、本发明的进一步改进在于:动力模块包括油箱、滤油器、液压泵、溢流阀、压力表、信号电力传输电缆四,动力模块为液压马达转体模块、前挠度修正模块和后挠度修正模块提供电力驱动,液压泵通过滤油器将液压油从油箱中吸入,液压泵的高压油通过进油液压管路一、进油液压管路二、进油液压管路三分别向液压马达转体模块、前挠度修正模块和后挠度修正模块供油,并通过回油液压管路一、回油液压管路二、回油液压管路三分别接收液压马达转体模块、前挠度修正模块和后挠度修正模块供油的回油,溢流阀安装在液压泵的出口端。
9、本发明的进一步改进在于:传感检测控制模块包括转速传感器、前端挠度传感器、后端挠度传感器、信号采集单元、信号传输单元、显示屏以及控制计算机,传感检测控制模块通过信号电力传输电缆四向动力模块提供电力,并控制动力模块的液压泵的启停;传感检测控制模块通过信号电力传输电缆二向前挠度修正模块提供电力,并控制前修正电液伺服阀的工作状态;传感检测控制模块通过信号电力传输电缆一向液压马达转体模块提供电力,并控制转体电液伺服阀的工作状态;传感检测控制模块通过信号电力传输电缆三向后挠度修正模块提供电力,并控制后修正电液伺服阀的工作状态。
10、本发明的进一步改进在于:转速传感器靠近液压马达主轴设置,并实时检测液压马达的转速和转向,前端挠度传感器实时检测管桩前端的挠度,后端挠度传感器实时检测管桩后端的挠度,信号采集单元将转速传感器、前端挠度传感器以及后端挠度传感器的实时检测值传送到控制计算机,控制计算机根据指令信号和采集的传感器信号,按照预定的算法进行综合处理与判断,输出相应的控制信号,并由信号传输单元传送到转体液压伺服阀、前修正电液伺服阀和后修正电液伺服阀,同时控制计算机向显示屏发出显示关键参数的信号指令。
11、本发明的进一步改进在于:液压马达转体模块与动力模块之间、前挠度修正模块与动力模块之间、后挠度修正模块与动力模块之间的液压管路均采用液压软管连接,液压马达转体模块、前挠度修正模块、后挠度修正模块与传感检测控制模块之间的通讯方式采用电缆线连接。
12、本发明的进一步改进在于:前挠度修正模块和后挠度修正模块分别设置在液压马达转体模块的两侧,液压马达转体模块位于管桩的中部。
13、一种利用大型管桩挠度修正的液压转体系统的转体方法,具体步骤包括:
14、s1、操作人员输入转体启动、转速设定值工作参数,控制计算机对转速传感器的实测值参数进行分析并发出转体指令信号,控制转体电液伺服阀的开口量和开口方向,即控制进入液压马达的流量以达到控制液压马达转速和转向的目的,从而构成液压马达的转速闭环控制;
15、s2、管桩转体时,信号采集单元将前端挠度传感器以及后端挠度传感器的实时检测的两端挠度值,通过信号传输单元传送到控制计算机;
16、s3、如果前端挠度值超过设定阈值,控制计算机发出前端挠度调节指令信号,由信号传输单元将其传送到前修正电液伺服阀,调节前修正电液伺服阀的开口量和开口方向,即控制进入前修正液压缸的流量,从而控制前修正液压缸的活塞杆的输出量以调整挠度,实现挠度的闭环控制,保证管桩的变形量在安全范围;
17、s4、如果后端挠度值超过设定阈值,控制计算机发出后端挠度调节指令信号,由信号传输单元将其传送到后修正电液伺服阀,调节后修正电液伺服阀的开口量和开口方向,即控制进入后修正液压缸的流量,从而控制后修正液压缸的活塞杆的输出量以调整挠度,实现挠度的闭环控制,保证管桩的变形量在安全范围;
18、s5、如果前、后端挠度值均超过设定阈值,控制计算机同时发出前端和后端挠度调节的两个指令信号,信号传输单元将两个指令信号同时传送到前修正电液伺服阀和后修正电液伺服阀,调节前修正电液伺服阀和后修正电液伺服阀的开口量和开口方向,即控制进入前修正液压缸、后修正液压缸的流量,从而同时控制前修正液压缸、后修正液压缸的活塞杆的输出量以调整挠度,实现挠度的闭环控制,保证管桩的变形量在安全范围。
19、本发明与现有技术相比具有以下优点:
20、1、可有效保证转体的转动速度可控,实现大型管桩转体的高精度、远程操作,避免管桩左、右两端挠度变形超限,保证管桩结构的安全性,提高转体自动控制水平,节省人力物力成本。
21、2、本技术中液压马达转速传感器实时检测马达的转速,并与预定马达转速信号相比较,形成闭环信号,控制转体电液伺服阀的开口量,保持液压马达转速平稳,挠度传感器实时检测管桩左右两端的挠度值,并与初始值比较,如果超出阈值,则通过左右挠度液压缸的伸缩量来调节挠度,使其保持在合理值的范围内,由于转体系统中油液传递动力及电缆线传递信号时不受场地限制,且实现油液运动的液压软管与电缆线具有较好柔性,可将动力模块和传感检测与控制模块布置在不同位置,实现转体的远程或无线操作。
- 还没有人留言评论。精彩留言会获得点赞!