一种基于云边协同的磁悬浮离心压缩机远程控制系统的制作方法
本发明属于物联网系统,具体涉及一种基于云边协同的磁悬浮离心压缩机远程控制系统。
背景技术:
1、磁悬浮离心压缩机是一种用于将气体压缩成高密度状态的设备,使用磁悬浮技术来支撑和控制压缩机的旋转部分,取代了传统的机械轴承,以减少摩擦和磨损,提高效率、可靠性和寿命。磁悬浮离心压缩机通常包括吸气设备、压缩设备、冷却设备和输出设备,吸气设备用来吸入气体,压缩设备是磁悬浮离心压缩机的核心部分,它包括旋转的叶片或离心轮,用于将吸入的气体加压,将其压缩成高密度状态。压缩气体通常会升温,因此需要冷却设备来冷却气体,以防止过热,冷却设备可以是热交换器或其他冷却系统。输出设备用于将压缩后的气体传送到所需的位置或应用中,这可以包括管道、阀门和其他控制装置。
2、目前,对于磁悬浮离心压缩机,往往进行定期人工巡检,并利用人工调整设备参数,这种方式增加了工作人员的工作量,不能确保全时段的人工监测,存在安全风险,效率低。另外,由于远程调控存在网络延迟过长风险,导致远程控制磁悬浮离心压缩机难以实现,导致设备维护智能化程度低。
技术实现思路
1、为了解决现有技术存在的由于存在网络延迟导致磁悬浮离心压缩机远程控制难以实现,需要进行人工巡检,不能全时段监测,工作效率低,存在安全风险的技术问题,本发明提供一种基于云边协同的磁悬浮离心压缩机远程控制系统。
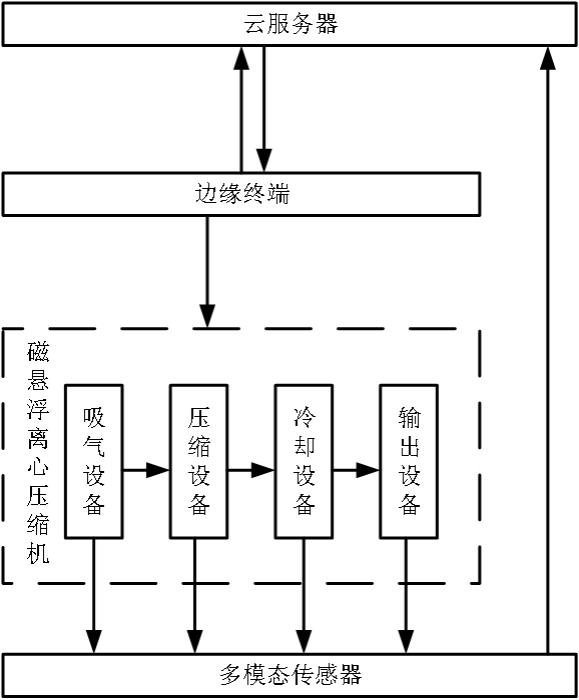
2、本发明提供了一种基于云边协同的磁悬浮离心压缩机远程控制系统,基于云边协同的磁悬浮离心压缩机远程控制系统包括云服务器、边缘终端多模态传感器和磁悬浮离心压缩机,云服务器分别通过边缘终端和多模态传感器与磁悬浮离心压缩机连接,其中,磁悬浮离心压缩机包括依次连接的吸气设备、压缩设备、冷却设备和输出设备;
3、基于云边协同的磁悬浮离心压缩机远程控制系统还包括:
4、第一建立模块,用于建立磁悬浮离心压缩机的数学模型;
5、确定模块,用于确定控制目标的输出误差,其中,控制目标包括吸气量、气体压缩比、冷却温度和气体输出量;
6、第二建立模块,用于根据数学模型,基于pid控制算法建立吸气设备、压缩设备、冷却设备和输出设备的误差控制模型;
7、第一优化模块,用于将误差控制模型上传至云服务器进行基于模糊算法的参数优化,其中,参数包括比例控制参数、积分控制参数和微分控制参数;
8、第二优化模块,用于以控制输出的误差最小为目标,将经过参数优化后对应的参数作为误差控制模型的参数,利用遗传算法对误差控制模型进行自适应优化,以搜索磁悬浮离心压缩机中各个设备的最佳执行量;
9、部署模块,用于将优化后的输出设备的误差控制模型部署至云服务器,剩余的误差控制模型部署至边缘终端;
10、设置模块,用于建立基于动态阈值的事件触发控制器,以设置输出设备的误差控制模型的指令发出频率;
11、控制模块,用于根据指令发出频率,利用边缘终端和云服务器的误差控制模型对磁悬浮离心压缩机进行控制。
12、与现有技术相比,本发明至少具有以下有益技术效果:
13、在本发明中,通过建立磁悬浮离心压缩机各个工作设备之间的数学模型,引入pid控制算法对各个设备的输出误差进行调节,利用模糊算法对pid的比例控制参数、积分控制参数和微分控制参数进行参数优化,之后利用遗传算法对误差控制模型进行基于实际运行情况的自适应优化,完成误差控制模型的微调,充分利用云服务器充足的计算资源,完成参数寻优和模型微调,降低模型调整时长,能够应对突发情况,以控制输出的误差最小为目标及时的完成误差控制模型的调整,充分确保系统的正常运行。将计算需求较低的误差控制模型部署至计算能力有限的边缘终端,完成数据的实时本地处理,避免数据传输导致的数据延迟,最大程度的避免机械故障,减少停机情况。通过建立基于动态阈值的事件触发控制器,在满足生产要求的前提下,降低部署至云服务器的误差控制模型的指令发出频率,减少因频繁调整产生的机械磨损,提升设备使用寿命,降低调整频率,降低云服务器负担,提升数据反馈实时性,降低系统远程控制的数据延迟。自动化程度高,能够减轻工作人员负担,降低工作人员巡检频率,完成全时段监控调整,生产安全性高,系统控制效率高。
技术特征:
1.一种基于云边协同的磁悬浮离心压缩机远程控制系统,其特征在于,所述基于云边协同的磁悬浮离心压缩机远程控制系统包括云服务器、边缘终端多模态传感器和磁悬浮离心压缩机,所述云服务器分别通过所述边缘终端和多模态传感器与所述磁悬浮离心压缩机连接,其中,所述磁悬浮离心压缩机包括依次连接的吸气设备、压缩设备、冷却设备和输出设备;所述基于云边协同的磁悬浮离心压缩机远程控制系统还包括:
2.根据权利要求1所述的基于云边协同的磁悬浮离心压缩机远程控制系统,其特征在于,所述数学模型具体为:
3.根据权利要求1所述的基于云边协同的磁悬浮离心压缩机远程控制系统,其特征在于,所述输出误差为所述控制目标的期望输出和实际输出的差值。
4.根据权利要求1所述的基于云边协同的磁悬浮离心压缩机远程控制系统,其特征在于,所述误差控制模型具体为:
5.根据权利要求4所述的基于云边协同的磁悬浮离心压缩机远程控制系统,其特征在于,所述第一优化模块具体用于:
6.根据权利要求1所述的基于云边协同的磁悬浮离心压缩机远程控制系统,其特征在于,所述第二优化模块具体用于:
7.根据权利要求1所述的基于云边协同的磁悬浮离心压缩机远程控制系统,其特征在于,所述部署模块具体用于:
8.根据权利要求1所述的基于云边协同的磁悬浮离心压缩机远程控制系统,其特征在于,所述设置模块具体用于:
9.根据权利要求1所述的基于云边协同的磁悬浮离心压缩机远程控制系统,其特征在于,还包括:
10.根据权利要求1所述的基于云边协同的磁悬浮离心压缩机远程控制系统,其特征在于,还包括:
技术总结
本发明公开了一种基于云边协同的磁悬浮离心压缩机远程控制系统,属于物联网系统技术领域,包括:第一建立模块,用于建立磁悬浮离心压缩机的数学模型;确定模块,用于确定控制目标的输出误差;第二建立模块,用于基于PID控制算法建立设备的误差控制模型;第一优化模块,用于对误差控制模型进行参数优化;第二优化模块,用于利用遗传算法对误差控制模型进行自适应优化;部署模块,用于部署误差控制模型;设置模块,用于建立基于动态阈值的事件触发控制器,以设置输出设备的误差控制模型的指令发出频率;控制模块,用于利用边缘终端和云服务器的误差控制模型对磁悬浮离心压缩机进行控制。完成系统全时段控制,提升系统远程控制的实时性。
技术研发人员:尹海日,王胜兵,潘超,毛红良,刘亨通
受保护的技术使用者:江苏海拓宾未来工业科技集团有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!