一种泵汽蚀状态监测诊断方法及系统与流程
本说明书实施例主要涉及泵汽蚀状态监测诊断,具体为一种泵汽蚀状态监测诊断方法及系统。
背景技术:
1、离心泵的汽蚀(即泵汽蚀)现象很难消除,如果能够快速准确地识别离心泵的汽蚀状态,并及时加以调整,可以使离心泵始终工作在最佳运行状态,减少离心泵的能源消耗,同时提高离心泵的使用寿命和可靠性。
2、现有技术采用性能参数法来识别离心泵的汽蚀现象,性能参数法将离心泵扬程下降3%的点作为汽蚀初生点。
3、但是,离心泵汽蚀现象的表现形式因设备状态和工作环境的不同而不同,表现离心泵汽蚀现象的信号具有复杂性、不确定性和耦合性。通过传统的性能参数法来识别离心泵的汽蚀现象,具有识别速度慢、识别准确低的缺陷。
技术实现思路
1、本说明书实施例针对现有技术存在的问题,提出了一种泵汽蚀状态监测诊断方法及系统,其技术方案如下:
2、在第一方面,本说明书实施例提供了一种泵汽蚀状态监测诊断方法,包括:
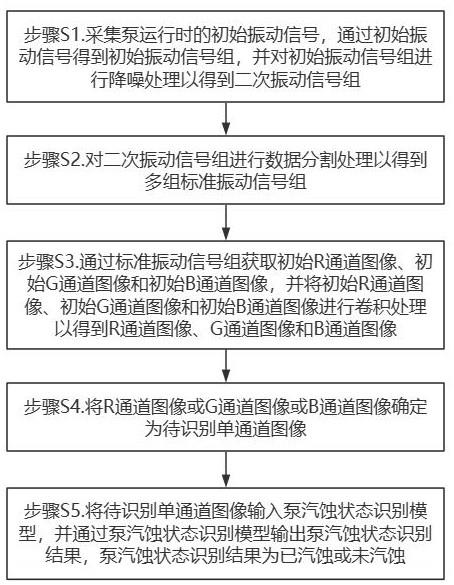
3、步骤s1.采集泵运行时的初始振动信号,通过初始振动信号得到初始振动信号组,并对初始振动信号组进行降噪处理以得到二次振动信号组;
4、步骤s2.对二次振动信号组进行数据分割处理以得到多组标准振动信号组;
5、步骤s3.通过标准振动信号组获取初始r通道图像、初始g通道图像和初始b通道图像,并将初始r通道图像、初始g通道图像和初始b通道图像进行卷积处理以得到r通道图像、g通道图像和b通道图像;
6、步骤s4.将r通道图像或g通道图像或b通道图像确定为待识别单通道图像;
7、步骤s5.将待识别单通道图像输入泵汽蚀状态识别模型,并通过泵汽蚀状态识别模型输出泵汽蚀状态识别结果,泵汽蚀状态识别结果为已汽蚀或未汽蚀。
8、作为优选,步骤s2具体包括:
9、步骤s21.确定标准振动信号组的总数据点个数,总数据点个数为n1个,并确定间隔数据点个数,间隔数据点个数为n2个,且将i的初始值设置为1;
10、步骤s22.获取二次振动信号组中的前n1个数据点,并将前n1个数据点确定为第i组标准振动信号;若二次振动信号组获取不到前n1个数据点,则结束;
11、步骤s23.将二次振动信号组中的前n2个数据点删除以形成新的二次振动信号组,并将i的值进行加一处理,返回步骤s22。
12、作为优选,步骤s4具体包括:
13、步骤s41.确定r通道图像的总图像个数,总图像个数为j个,且将j的初始值设置为1;
14、步骤s42.获取第j个r通道图像与第j个未汽蚀r通道图像的第一差异值,获取第j个g通道图像与第j个未汽蚀g通道图像的第二差异值,以及获取第j个b通道图像与第j个未汽蚀b通道图像的第三差异值,并将第一差异值、第二差异值、第三差异值中的最大值作为第j个最大差异值;
15、步骤s43.判定j的值是否等于总图像个数j,当j的值不等于总图像个数j时,将j的值进行加一处理,并返回步骤s42;当j的值等于总图像个数j时,进入步骤s44;
16、步骤s44.统计第一差异值作为最大差异值的次数以得到第一次数值,统计第二差异值作为最大差异值的次数以得到第二次数值,统计第三差异值作为最大差异值的次数以得到第三次数值;
17、步骤s45.将第一次数值、第二次数值、第三次数值进行比对,当第一次数值最大时,将r通道图像作为待识别单通道图像;当第二次数值最大时,将g通道图像作为待识别单通道图像;当第三次数值最大时,将b通道图像作为待识别单通道图像。
18、作为优选,获取第j个r通道图像与第j个未汽蚀r通道图像的第一差异值具体包括:
19、步骤s421.获取第j个r通道图像上第一位置点的第一像素值,并获取第j个未汽蚀r通道图像上与第一位置点对应的第二位置点的第二像素值,将第一像素值与第二像素值的差值绝对值作为初始差异值;重复步骤s421直到第j个r通道图像上全部第一位置点都计算得到对应初始差异值;
20、步骤s422.将全部初始差异值相加并除以初始差异值的总个数以得到第一差异值。
21、作为优选,步骤s5中的泵汽蚀状态识别模型具体为lenet-5卷积神经网络。
22、在第二方面,本说明书实施例提供了一种泵汽蚀状态监测诊断系统,包括:
23、振动信号采集降噪模块,用于采集泵运行时的初始振动信号,通过初始振动信号得到初始振动信号组,并对初始振动信号组进行降噪处理以得到二次振动信号组;
24、标准振动信号获取模块,用于对二次振动信号组进行数据分割处理以得到多组标准振动信号组;
25、第一rgb通道图像获取模块,用于通过标准振动信组获取初始r通道图像、初始g通道图像和初始b通道图像;
26、第二rgb通道图像获取模块,用于将初始r通道图像、初始g通道图像和初始b通道图像进行卷积处理以得到r通道图像、g通道图像和b通道图像;
27、待识别单通道图像确定模块,用于将r通道图像或g通道图像或b通道图像确定为待识别单通道图像;
28、泵汽蚀状态识别模块,用于将待识别单通道图像输入泵汽蚀状态识别模型,并通过泵汽蚀状态识别模型输出泵汽蚀状态识别结果,泵汽蚀状态识别结果为已汽蚀或未汽蚀。
29、作为优选,标准振动信号获取模块包括:
30、总数据点个数确定单元,用于确定标准振动信号组的总数据点个数,总数据点个数为n1个;
31、间隔数据点个数确定单元,用于确定间隔数据点个数,间隔数据点个数为n2个;
32、第一i值设置单元,用于将i的初始值设置为1;
33、标准振动信号确定单元,用于获取二次振动信号组中的前n1个数据点,并将前n1个数据点确定为第i组标准振动信号;
34、二次振动信号更新单元,用于将二次振动信号组中的前n2个数据点删除以形成新的二次振动信号组;
35、第二i值设置单元,用于将i的值进行加一处理。
36、作为优选,待识别单通道图像确定模块包括:
37、总图像个数确定单元,用于确定r通道图像的总图像个数,总图像个数为j个;
38、第一j值设置单元,用于将j的初始值设置为1;
39、第一差异值获取单元,用于获取第j个r通道图像与第j个未汽蚀r通道图像的第一差异值;
40、第二差异值获取单元,用于获取第j个g通道图像与第j个未汽蚀g通道图像的第二差异值;
41、第三差异值获取单元,用于获取第j个b通道图像与第j个未汽蚀b通道图像的第三差异值;
42、最大差异值确定单元,用于将第一差异值、第二差异值、第三差异值中的最大值作为第j个最大差异值;
43、j值判定单元,用于判定j的值是否等于总图像个数j;
44、第二j值设置单元,用于当j的值不等于总图像个数j时,将j的值进行加一处理;
45、次数值确定单元,用于统计第一差异值作为最大差异值的次数以得到第一次数值,统计第二差异值作为最大差异值的次数以得到第二次数值,统计第三差异值作为最大差异值的次数以得到第三次数值;
46、待识别单通道图像确定单元,用于将第一次数值、第二次数值、第三次数值进行比对,当第一次数值最大时,将r通道图像作为待识别单通道图像;当第二次数值最大时,将g通道图像作为待识别单通道图像;当第三次数值最大时,将b通道图像作为待识别单通道图像。
47、作为优选,第一差异值获取单元包括:
48、初始差异值确定次单元,用于获取第j个r通道图像上第一位置点的第一像素值,并获取第j个未汽蚀r通道图像上与第一位置点对应的第二位置点的第二像素值,将第一像素值与第二像素值的差值绝对值作为初始差异值;
49、第一差异值确定次单元,用于将全部初始差异值相加并除以初始差异值的总个数以得到第一差异值。
50、作为优选,泵汽蚀状态识别模块中的泵汽蚀状态识别模型具体为lenet-5卷积神经网络。
51、有益效果
52、本说明书实施例的泵汽蚀状态监测诊断方法及系统,先通过振动信号获取标准振动信号组,然后通过标准振动信号组获取初始r/g/b通道图像,接着对初始r/g/b通道图像进行卷积处理以得到r/g/b通道图像,再接着在r/g/b通道图像中获取与未汽蚀r/g/b通道图像差异最大的r或g或b通道图像,最后将确定好的r或g或b通道图像输入泵汽蚀状态识别模型以得到最终的泵汽蚀状态识别结果,通过r或g或b通道图像进行泵汽蚀状态识别,其识别速度较快、识别准确较高。
- 还没有人留言评论。精彩留言会获得点赞!