压缩机控制方法、装置、电子设备及存储介质与流程
本技术涉及压缩机控制,尤其涉及一种压缩机控制方法、装置、电子设备及存储介质。
背景技术:
1、目前,冰箱压缩机在基速以下采用最大转矩电流比(maximum torque perampere,mtpa)控制,当电机转速升至基速时,电机端电压输出达到最大,若需要进一步提升转速,需要采用弱磁控制方案。弱磁控制是指负向增大直轴电流id,减小电机的反电动势,使电机突破基速限制,可以运行在更高的转速下。
2、但是,传统弱磁控制方案都是根据压缩机可能的运行工况事先确定弱磁深度(即,负向id的范围),难以在保证压缩机转速范围的同时获得较高的能效,一般弱磁深度越大,控制系统的效率就越低,而弱磁深度小则有可能使电压饱和,使压缩机无法达到目标转速。
技术实现思路
1、本技术实施例的目的在于提供一种压缩机控制方法、装置、电子设备及存储介质,以解决传统弱磁控制方案难以在保证压缩机转速范围的同时获得较高的能效的问题。具体技术方案如下:
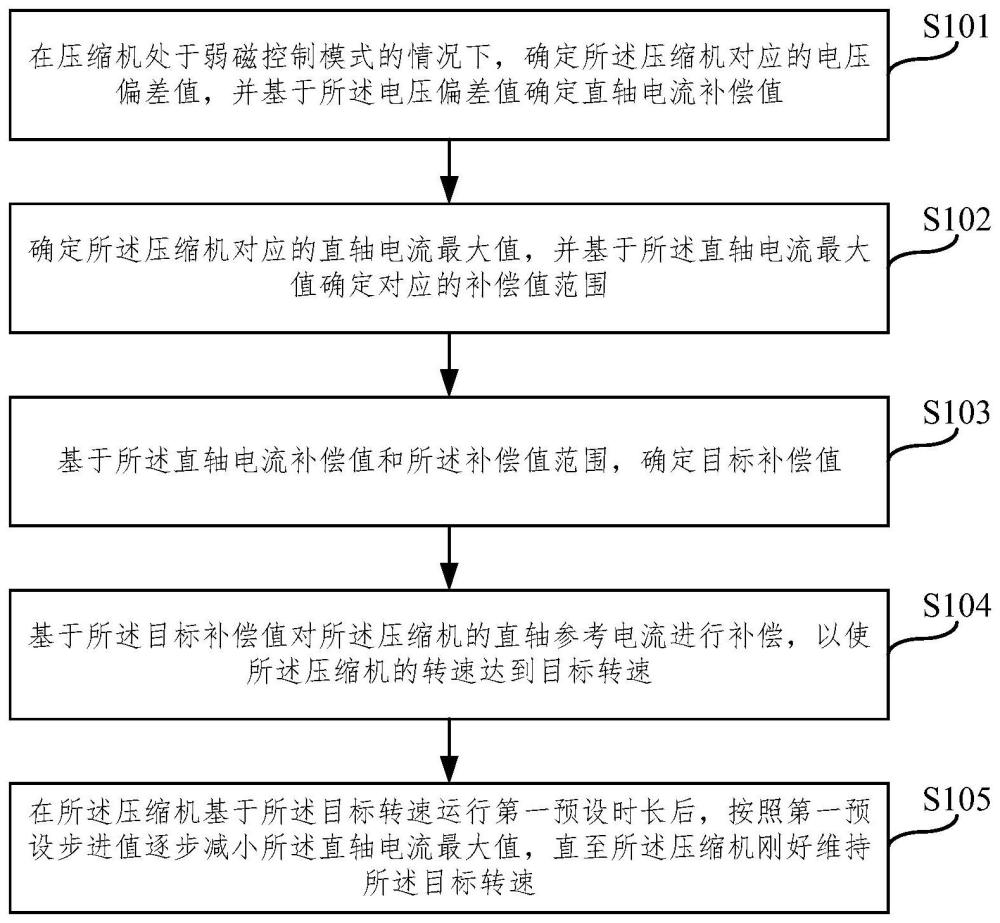
2、第一方面,本技术提供了一种压缩机控制方法,包括:
3、在压缩机处于弱磁控制模式的情况下,确定所述压缩机对应的电压偏差值,并基于所述电压偏差值确定直轴电流补偿值,其中,所述电压偏差值为端电压最大值和当前端电压之间的差值;
4、确定所述压缩机对应的直轴电流最大值,并基于所述直轴电流最大值确定对应的补偿值范围;
5、基于所述直轴电流补偿值和所述补偿值范围,确定目标补偿值;
6、基于所述目标补偿值对所述压缩机的直轴参考电流进行补偿,以使所述压缩机的转速达到目标转速;
7、在所述压缩机基于所述目标转速运行第一预设时长后,按照第一预设步进值逐步减小所述直轴电流最大值,直至所述压缩机刚好维持所述目标转速。
8、在一个可能的实施方式中,所述确定所述压缩机对应的直轴电流最大值,包括:
9、获取所述压缩机对应的负载转矩最大值和电机定子电流最大值,并将所述负载转矩最大值和所述电机定子电流最大值代入以下公式得到所述直轴电流最大值;
10、
11、其中,te为电磁转矩,tl为负载转矩最大值,id为电机d轴电流,iq为电机q轴电流;p为电机极对数;ψf为电机转子磁链;ld为电机d轴电感;lq为电机q轴电感;ismax为电机定子电流最大值。
12、在一个可能的实施方式中,所述基于所述直轴电流最大值确定对应的补偿值范围,包括:
13、获取所述压缩机对应的负载数据和电机转速;
14、基于所述负载数据和所述电机转速确定第一系数和第二系数,其中,所述负载数据越大、所述电机转速越高,则所述第一系数和所述第二系数的取值越大,且,所述第一系数小于所述第二系数;
15、基于所述第一系数、所述第二系数及所述直轴电流最大值,确定对应的补偿值范围,其中,所述补偿值范围的下限为所述第一系数与所述直轴电流最大值的乘积,所述补偿值范围的上限为所述第二系数与所述直轴电流最大值的乘积。
16、在一个可能的实施方式中,所述基于所述直轴电流补偿值和所述补偿值范围,确定目标补偿值,包括:
17、在所述直轴电流补偿值的绝对值小于所述补偿值范围下限的情况下,将所述直轴电流补偿值确定为目标补偿值;
18、在所述直轴电流补偿值的绝对值处于所述补偿值范围内的情况下,将所述直轴电流补偿值和所述第一系数的乘积确定为目标补偿值;
19、在所述直轴电流补偿值的绝对值大于所述补偿值范围上限的情况下,将所述直轴电流补偿值和所述第二系数的乘积确定为目标补偿值。
20、在一个可能的实施方式中,所述基于所述目标补偿值对所述压缩机的直轴参考电流进行补偿,以使所述压缩机的转速达到目标转速,包括:
21、在所述直轴电流补偿值的绝对值处于所述补偿值范围内的情况下,确定第二预设时长内所述压缩机的转速是否达到目标转速;
22、在所述压缩机的转速未达到目标转速的情况下,按照第二预设步进值逐步增加所述目标补偿值,直至所述压缩机达到所述目标转速。
23、在一个可能的实施方式中,所述确定所述压缩机对应的电压偏差值之前,还包括:
24、获取所述压缩机的端电压和电机转速;
25、在所述端电压大于或等于预设电压阈值,且,所述电机转速大于或等于预设转速阈值的情况下,控制所述压缩机进入弱磁控制模式。
26、在一个可能的实施方式中,所述基于所述目标补偿值对所述压缩机的直轴参考电流进行补偿,以使所述压缩机的转速达到目标转速之后,还包括:
27、获取所述压缩机对应的电机定子电流输出值和电机转速;
28、在所述电机定子电流输出值大于或等于电机定子电流最大值,且,所述电机转速小于或等于所述目标转速的情况下,控制所述压缩机退出所述弱磁控制模式以及降低所述目标转速。
29、第二方面,本技术提供了一种压缩机控制装置,包括:
30、第一确定模块,用于在压缩机处于弱磁控制模式的情况下,确定所述压缩机对应的电压偏差值,并基于所述电压偏差值确定直轴电流补偿值,其中,所述电压偏差值为端电压最大值和当前端电压之间的差值;
31、第二确定模块,用于确定所述压缩机对应的直轴电流最大值,并基于所述直轴电流最大值确定对应的补偿值范围;
32、第三确定模块,用于基于所述直轴电流补偿值和所述补偿值范围,确定目标补偿值;
33、电流补偿模块,用于基于所述目标补偿值对所述压缩机的直轴参考电流进行补偿,以使所述压缩机的转速达到目标转速;
34、电流调整模块,用于在所述压缩机基于所述目标转速运行第一预设时长后,按照第一预设步进值逐步减小所述直轴电流最大值,直至所述压缩机刚好维持所述目标转速。
35、在一个可能的实施方式中,所述第二确定模块,进一步用于:
36、获取所述压缩机对应的负载转矩最大值和电机定子电流最大值,并将所述负载转矩最大值和所述电机定子电流最大值代入以下公式得到所述直轴电流最大值;
37、
38、其中,te为电磁转矩,tl为负载转矩最大值,id为电机d轴电流,iq为电机q轴电流;p为电机极对数;ψf为电机转子磁链;ld为电机d轴电感;lq为电机q轴电感;ismax为电机定子电流最大值。
39、在一个可能的实施方式中,所述第二确定模块,进一步用于:
40、获取所述压缩机对应的负载数据和电机转速;
41、基于所述负载数据和所述电机转速确定第一系数和第二系数,其中,所述负载数据越大、所述电机转速越高,则所述第一系数和所述第二系数的取值越大,且,所述第一系数小于所述第二系数;
42、基于所述第一系数、所述第二系数及所述直轴电流最大值,确定对应的补偿值范围,其中,所述补偿值范围的下限为所述第一系数与所述直轴电流最大值的乘积,所述补偿值范围的上限为所述第二系数与所述直轴电流最大值的乘积。
43、在一个可能的实施方式中,所述第三确定模块,进一步用于:
44、在所述直轴电流补偿值的绝对值小于所述补偿值范围下限的情况下,将所述直轴电流补偿值确定为目标补偿值;
45、在所述直轴电流补偿值的绝对值处于所述补偿值范围内的情况下,将所述直轴电流补偿值和所述第一系数的乘积确定为目标补偿值;
46、在所述直轴电流补偿值的绝对值大于所述补偿值范围上限的情况下,将所述直轴电流补偿值和所述第二系数的乘积确定为目标补偿值。
47、在一个可能的实施方式中,所述电流补偿模块,进一步用于:
48、在所述直轴电流补偿值的绝对值处于所述补偿值范围内的情况下,确定第二预设时长内所述压缩机的转速是否达到目标转速;
49、在所述压缩机的转速未达到目标转速的情况下,按照第二预设步进值逐步增加所述目标补偿值,直至所述压缩机达到所述目标转速。
50、在一个可能的实施方式中,所述装置还包括进入模块,用于:
51、获取所述压缩机的端电压和电机转速;
52、在所述端电压大于或等于预设电压阈值,且,所述电机转速大于或等于预设转速阈值的情况下,控制所述压缩机进入弱磁控制模式。
53、在一个可能的实施方式中,所述装置还包括退出模块,用于:
54、获取所述压缩机对应的电机定子电流输出值和电机转速;
55、在所述电机定子电流输出值大于或等于电机定子电流最大值,且,所述电机转速小于或等于所述目标转速的情况下,控制所述压缩机退出所述弱磁控制模式以及降低所述目标转速。
56、第三方面,提供了一种电子设备,包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;
57、存储器,用于存放计算机程序;
58、处理器,用于执行存储器上所存放的程序时,实现第一方面任一所述的方法步骤。
59、第四方面,提供了一种计算机可读存储介质,其特征在于,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现第一方面任一所述的方法步骤。
60、第五方面,提供了一种包含指令的计算机程序产品,当其在计算机上运行时,使得计算机执行上述任一所述的压缩机控制方法。
61、本技术实施例有益效果:
62、本技术实施例提供了一种压缩机控制方法、装置、电子设备及存储介质,本技术实施例中,在压缩机处于弱磁控制模式的情况下,首先,确定压缩机对应的电压偏差值,并基于电压偏差值确定直轴电流补偿值,然后,确定压缩机对应的直轴电流最大值,并基于直轴电流最大值确定对应的补偿值范围,以及,基于直轴电流补偿值和补偿值范围,确定目标补偿值,并基于目标补偿值对压缩机的直轴参考电流进行补偿,以使压缩机的转速达到目标转速,最后,在压缩机基于目标转速运行第一预设时长后,按照第一预设步进值逐步减小直轴电流最大值,直至压缩机刚好维持目标转速。通过本技术,在当前弱磁深度范围(即补偿值范围)能够使压缩机达到目标转速时,可以通过逐步减小弱磁深度直至以最小的弱磁深度运行在目标转速下来降低能耗,如此,可以在保证压缩机转速范围的同时获得较高的能效。
63、当然,实施本技术的任一产品或方法并不一定需要同时达到以上所述的所有优点。
- 还没有人留言评论。精彩留言会获得点赞!