工作平台调平系统的制作方法
本发明涉及工作平台调平系统,属于调平系统液压控制领域。
背景技术:
1、工作平台调平系统一般通过液压控制臂架俯仰(或称为变幅)和平台绕臂架的转动,平台上升同时保持水平;
2、现有的工作平台调平系统通过两根油缸分别控制臂架相对于转台的变幅、平台绕臂架的转动,平台上升同时保持水平需要实时协调两根油缸的伸缩行程,现有技术采用两根单杆双作用油缸并计算复杂的铰点位置以调整平台转动角度与臂架变幅角度相近,实现平台调平;但平台在臂架变幅过程中无法实时调平,存在难以克服的平台前倾或后翻,降低高空作业人员的舒适性和高空作业的精准度的问题,转台调平三角形和平台调平三角形的匹配难度大,计算过程复杂、需要反复调整铰点位置和油缸参数,且无法计算出最优调平三角形;
3、因此业界受到平台上升时臂架变幅与平台转动无法精准实时调平的困扰。
技术实现思路
1、本公开实施例的目的在于克服现有技术中的不足,提供臂架变幅与平台转动精准实时调平的工作平台调平系统和高空作业平台。
2、为达到上述目的,本公开实施例是采用下述技术方案实现的:
3、第一方面,本公开实施例提供,工作平台调平系统,包括转台、臂架和平台,还包括,
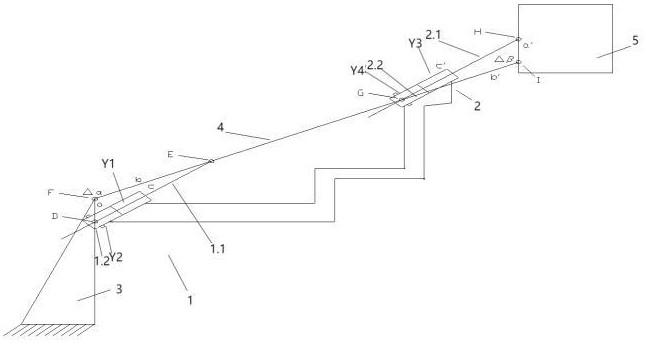
4、第一双杆双作用油缸,所述第一双杆双作用油缸包括第一活塞杆和第一缸体,所述第一缸体与所述转台铰接于第一点,所述第一活塞杆与所述臂架铰接于第二点;所述臂架与所述转台铰接于第三点;
5、第二双杆双作用油缸,所述第二双杆双作用油缸包括第二活塞杆和第二缸体,所述第二缸体与所述臂架铰接于第四点,所述第二活塞杆与所述平台铰接于第五点,所述臂架和所述平台铰接于第六点;
6、所述第一双杆双作用油缸与所述第二双杆双作用油缸交叉连通,以使所述第一活塞杆与所述第二活塞杆同步伸缩;
7、所述第一点到所述第三点的第一点距与所述第五点到所述第六点的第四点距、所述第二点到所述第三点的第二点距与所述第四点到所述第六点的第五点距、所述第一点到所述第二点的第三点距与所述第四点到所述第五点的第六点距的关系为:所述第一点距/所述第四点距=所述第二点距/所述第五点距=所述第三点距/所述第六点距=所述第一双杆双作用油缸的单位行程/所述第二双杆双作用油缸的单位行程。
8、在第一方面的一些实施例中,所述第一点距与所述第四点距等距,所述第二点距与所述第五点距等距,所述第三点距与所述第六点距等距,所述第一双杆双作用油缸和所述第二双杆双作用油缸的单位行程相同。
9、在第一方面的一些实施例中,所述第一双杆双作用油缸和所述第二双杆双作用油缸的单位行程相同,包括,
10、所述第一双杆双作用油缸的第一油缸有效截面积s1与所述第二双杆双作用油缸的第二油缸有效截面积s2相同;
11、所述第一油缸有效截面积s1=π×第一双杆双作用油缸的缸半径²-π×第一双杆双作用油缸的活塞杆半径²;
12、所述第二油缸有效截面积s2=π×第二双杆双作用油缸的缸半径²-π×第二双杆双作用油缸的活塞杆半径²。
13、在第一方面的一些实施例中,还包括第一双向平衡阀,所述第一双向平衡阀的两个工作口分别接入所述第一双杆双作用油缸的两个工作口;所述第一双向平衡阀的两个工作口也分别接入所述第二双杆双作用油缸的两个工作口。
14、在第一方面的一些实施例中,还包括第二双向平衡阀,所述第二双向平衡阀的两个工作口分别接入所述第二双杆双作用油缸的两个工作口。
15、在第一方面的一些实施例中,还包括液压控制阀,所述液压控制阀的两个工作口分别接入所述第一双杆双作用油缸的两个工作口,也接入所述第二双杆双作用油缸的两个工作口。
16、在第一方面的一些实施例中,还包括第一双向平衡阀,所述第一双向平衡阀串联至连通所述第一双杆双作用油缸和所述液压控制阀的管路;
17、还包括第二双向平衡阀,所述第二双向平衡阀串联至连通所述第二双杆双作用油缸和所述所述液压控制阀的管路;
18、所述第一双向平衡阀和所述第二双向平衡阀并联至所述液压控制阀。
19、在第一方面的一些实施例中,所述第五点和所述第六点均位于所述平台的同一垂直侧面;所述第三点和所述第一点均位于所述转台的同一垂直侧面。
20、第二方面,本公开实施例提供高空作业平台,包括第一方面实施例任一项所述的工作平台调平系统。
21、与现有技术相比,本公开实施例所达到的有益效果:
22、本公开实施例提供的工作平台调平系统,第一双杆双作用油缸与第二双杆双作用油缸由于双杆双作用油缸性质,在单个油缸中伸出/回缩的单位进出油量相同;交叉连通使第一双杆双作用油缸与第二双杆双作用油缸互相驱动同步伸缩,第一双杆双作用油缸与第二双杆双作用油缸单位液压油下的行程比与第一点、第二点和第三点构成的△dfe和第四点、第五点和第六点构成的△hig互为相似三角形的边长比相同,在臂架变幅和平台转动时△dfe与△hig始终互为相似三角形,进而∠dfe的增量与∠hig的增量始终大小相同方向相反,使平台保持同一水平角度,解决了现有技术中臂架变幅与平台转动无法精准实时调平的问题;
23、第一双杆双作用油缸与第二双杆双作用油缸等行程伸缩,△dfe与△hig始终互为全等三角形,进一步提高平台的角度稳定性;
24、本公开实施例提供的高空作业平台具备与工作平台调平系统相同的有益效果。
技术特征:
1.工作平台调平系统,包括转台(3)、臂架(4)和平台(5),其特征在于,还包括,
2.根据权利要求1所述工作平台调平系统,其特征在于,所述第一点距(a)与所述第四点距(a’)等距,所述第二点距(b)与所述第五点距(b’)等距,所述第三点距(c)与所述第六点距(c’)等距,所述第一双杆双作用油缸(1)和所述第二双杆双作用油缸(2)的单位行程相同。
3.根据权利要求1所述工作平台调平系统,其特征在于,所述第一双杆双作用油缸(1)和所述第二双杆双作用油缸(2)的单位行程相同,包括,
4.根据权利要求1所述工作平台调平系统,其特征在于,还包括第一双向平衡阀(6),所述第一双向平衡阀(6)的两个工作口分别接入所述第一双杆双作用油缸(1)的两个工作口;所述第一双向平衡阀(6)的两个工作口也分别接入所述第二双杆双作用油缸(2)的两个工作口。
5.根据权利要求1所述工作平台调平系统,其特征在于,还包括第二双向平衡阀(7),所述第二双向平衡阀(7)的两个工作口分别接入所述第二双杆双作用油缸(2)的两个工作口。
6.根据权利要求1所述工作平台调平系统,其特征在于,还包括液压控制阀(8),所述液压控制阀(8)的两个工作口分别接入所述第一双杆双作用油缸(1)的两个工作口,也接入所述第二双杆双作用油缸(2)的两个工作口。
7.根据权利要求6所述工作平台调平系统,其特征在于,还包括第一双向平衡阀(6),所述第一双向平衡阀(6)串联至连通所述第一双杆双作用油缸(1)和所述液压控制阀(8)的管路;
8.根据权利要求1所述工作平台调平系统,其特征在于,所述第五点(h)和所述第六点(i)均位于所述平台(5)的同一垂直侧面;所述第三点(f)和所述第一点(d)均位于所述转台(3)的同一垂直侧面。
9.高空作业平台,其特征在于,包括权利要求1至8任一项所述的工作平台调平系统。
技术总结
本发明公开了调平系统液压控制领域的工作平台调平系统,旨在解决现有技术中臂架变幅与平台转动无法精准实时调平的问题。其包括:第一双杆双作用油缸与第二双杆双作用油缸在单个油缸中伸出/回缩的单位进出油量相同;交叉连通使第一双杆双作用油缸与第二双杆双作用油缸互相驱动同步伸缩,第一双杆双作用油缸与第二双杆双作用油缸单位液压油下的行程比与第一点、第二点和第三点构成的△DFE与第四点、第五点和第六点构成的△HIG互为相似三角形的边长比相同,在臂架变幅和平台转动时△DFE与△HIG始终互为相似三角形,进而∠DFE的增量与∠HIG的增量始终大小相同方向相反,使平台保持同一水平角度。
技术研发人员:朱赛,徐蕾,卢良卫,陈帅,王保福
受保护的技术使用者:徐工消防安全装备有限公司
技术研发日:
技术公布日:2024/3/5
- 还没有人留言评论。精彩留言会获得点赞!