一种螺杆组件及真空泵的制作方法
本技术涉及干式螺杆真空泵领域,具体而言,涉及一种螺杆组件及真空泵。
背景技术:
1、干式螺杆真空泵是一种容积式真空泵,通常通过两个螺杆转子之间的同步高速反向旋转,使两个螺杆转子和泵体的内腔之间形成的工作腔的容积发生周期性变化,以实现气体的吸入、增压和排出。现有的干式螺杆真空泵结构复杂,其真空泵中的两个转子的端面型线中的渐开线及圆弧线段等线段设计不合理,会导致真空泵结构设计不良会出现啮合尖点问题,从而导致转子不能严密啮合。
技术实现思路
1、本实用新型提供了一种螺杆组件及真空泵,以解决两个转子在转动过程中出现啮合尖点以及转子不能严密啮合的技术问题。
2、本实用新型的实施例可以这样实现:
3、第一方面,本实用新型提供一种螺杆组件,包括端面型线相同且旋向相反的第一螺杆转子和第二螺杆转子;
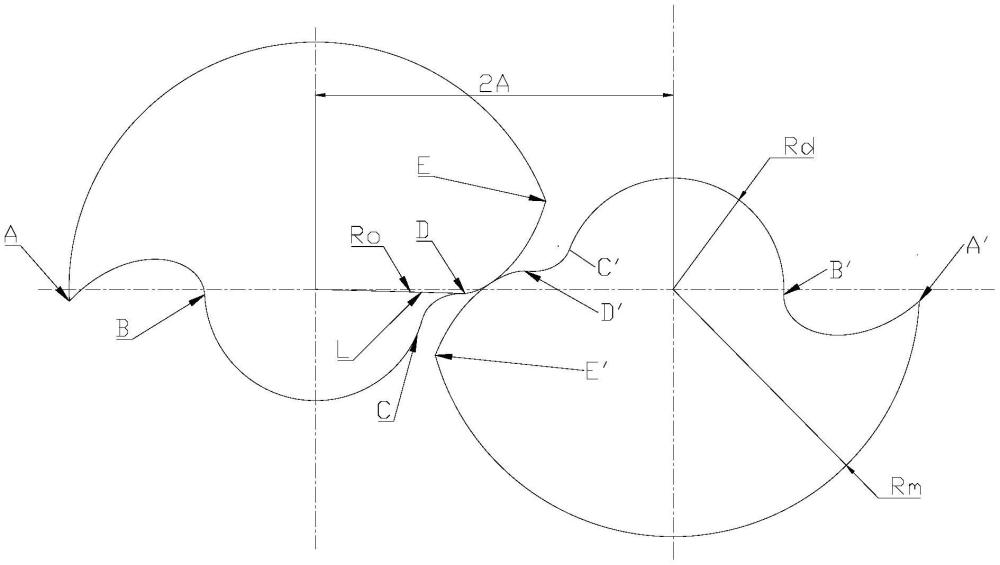
4、所述第一螺杆转子的端面型线包括依次首尾连接的摆线ab、齿根圆圆弧段bc、摆线cd、渐开线de以及齿顶圆圆弧段ea,所述第二螺杆转子的端面型线包括依次首尾连接的摆线a’b’、齿根圆圆弧段b’c’、摆线c’d’、渐开线d’e’以及齿顶圆圆弧段e’a’;
5、在所述第一螺杆转子和所述第二螺杆转子转动啮合的过程中,所述摆线ab与所述齿顶圆圆弧段ea的连接点a与所述摆线a’b’啮合,所述齿根圆圆弧段bc与所述齿顶圆圆弧段e’a’啮合,所述渐开线de以及所述齿顶圆圆弧段ea的连接点e与所述摆线c’d’啮合,所述渐开线de与所述渐开线d’e’啮合。
6、在上述实施例中,第一螺杆转子和第二螺杆转子的端面型线相同且旋向相反,以实现型线的对称性以及第一螺杆转子和第二螺杆转子的结构一致性,从而提高第一螺杆转子和第二螺杆转子匹配啮合程度,实现了两个螺杆转子在工作中能够严密啮合。
7、在可选的实施方式中,所述摆线ab的参数方程为:
8、x=rm*sin(2*t)-2a*sin(t);
9、y=2a*cos(t)-rm*cos(2*t);
10、其中,t为变量,x和y为所述摆线ab上点的直角坐标,所述齿根圆圆弧段bc所在圆与所述齿顶圆圆弧段ea所在圆为同心圆,所述齿根圆圆弧段bc所在圆的圆心为所述第一螺杆转子100的中心,所述齿根圆圆弧段b’c’所在圆与所述齿顶圆圆弧段e’a’所在圆为同心圆,所述齿根圆圆弧段b’c’所在圆的圆心为所述第二螺杆转子200的中心,2a为所述第一螺杆转子100和所述第二螺杆转子200的中心距,rm为所述螺杆转子的齿顶圆的半径。
11、在上述实施例中,以齿顶圆和齿根圆的圆心为坐标原点建立直角坐标系,根据摆线ab的参数方程,连续输入变量t即可确立摆线ab的线形。
12、在可选的实施方式中,所述t的取值范围为:0≤t≤arccos(2a/(2*rm))。
13、在上述实施例中,根据t的取值范围,以此确定摆线ab的具体曲线段。通过将t的取值范围限定在0~arccos(2a/(2*rm)),避免在端面型线的摆线ab处形成锐角尖点现象,因而提升两个螺杆转子的啮合性和密封性。
14、在可选的实施方式中,所述摆线cd的参数方程为:
15、x=-rm*sin(2*t)-2a*sin(t);
16、y=2a*cos(t)-rm*cos(2*t);
17、其中,t为变量,x和y为所述摆线cd上点的直角坐标,所述齿根圆圆弧段bc所在圆与所述齿顶圆圆弧段ea所在圆为同心圆,所述齿根圆圆弧段bc所在圆的圆心为所述第一螺杆转子100的中心,所述齿根圆圆弧段b’c’所在圆与所述齿顶圆圆弧段e’a’所在圆为同心圆,所述齿根圆圆弧段b’c’所在圆的圆心为所述第二螺杆转子200的中心,2a为所述第一螺杆转子100和所述第二螺杆转子200的中心距,rm为所述螺杆转子的齿顶圆的半径。
18、在上述实施例中,以齿顶圆和齿根圆的圆心为坐标原点建立直角坐标系,根据摆线cd的参数方程,连续输入变量t即可确立摆线cd的线型。
19、在可选的实施方式中,所述t的取值范围为0≤t≤arccos(2a/(2*rm))。
20、在上述实施例中,根据t的取值范围,以此确定摆线cd的具体曲线段。通过将t的取值范围限定在0~arccos(2a/(2*rm)),避免在端面型线的摆线cd处形成锐角尖点现象,因而提升两个螺杆转子的啮合性和密封性。
21、在可选的实施方式中,所述渐开线de的参数方程为:
22、
23、
24、其中,t为变量,x和y为所述摆线cd上点的直角坐标,直线l为过第一螺杆转子的中心与摆线cd相切的直线,ro为所述直线l与摆线cd的相交点到所述第一螺杆转子的中心的距离,rm为所述螺杆转子的齿顶圆的半径,rd为所述螺杆转子的齿根圆的半径。
25、在上述实施例中,以齿顶圆和齿根圆的圆心为坐标原点建立直角坐标系,根据渐开线de的参数方程,连续输入变量t即可确立渐开线de的线型,且ro也为渐开线de的基圆半径,基圆半径为凸轮的理论廓线的最小半径,能够保证渐开线de与摆线cd相切,确保加工过程中刀具能够平滑过渡,并且避免了出现过渡不良的现象。
26、在可选的实施方式中,所述t的取值范围为:
27、
28、在上述实施例中,以齿顶圆和齿根圆的圆心为坐标原点建立直角坐标系,根据t的取值范围,以此确定渐开线de的具体曲线段。通过将t的取值范围限定在(rd^2/ro^2-1)^0.5~(rm^2/ro^2-1)^0.5,避免在端面型线的渐开线de处形成锐角尖点现象,因而提升两个螺杆转子的啮合性和密封性。
29、在可选的实施方式中,所述螺杆转子的螺旋线方程为:
30、x=rm*cos(t);
31、y=rm*sin(t);
32、
33、其中,t为变量,x、y和z为所述螺杆转子的螺旋线上的点坐标,
34、所述螺杆转子的螺旋线由多段依次连接的螺旋段组成,p1为第n段所述螺旋段的起始端部螺距,第n段所述螺旋段的起始端与第n-1段所述螺旋段的终止端连接,p2为第n段所述螺旋段的终止端部螺距,第n段所述螺旋段的终止端与第n+1段所述螺旋段的起始端连接,相邻两个螺旋齿之间的间隙即为螺距,z1为n-1段所述螺旋段的轴向长度,t1为第n-1段所述螺旋段的旋转角度,旋转角度为螺旋段的一个点沿其一端移动至另一端的过程中,该点在与转子的轴线垂直的投影面上以轴线为中心旋转的角度;
35、其中,n≥1,且在n=1时,z1=0,t1=0°。
36、在上述实施例中,依据螺旋线参数方程,连续输入变量t即可确立螺杆转子螺旋线的线型,并可以使得两个螺杆转子所形成的螺旋线能够严密啮合。
37、在可选的实施方式中,所述t的取值范围为t1<t<t2,其中,t2为第n段所述螺旋段的外周螺旋线绕自身轴线的旋转角度。
38、在上述实施例中,根据t的取值范围,以此确定螺旋线的具体曲线段。通过将t限定在t1~t2,以使得两个螺杆转子所形成的螺旋线能够严密啮合。
39、第二方面,本实用新型提供一种真空泵,包括前述实施方式任一项所述的螺杆组件。
40、本实用新型实施例提供的螺杆组件及真空泵的有益效果包括:通过第一螺杆转子和第二螺杆转子的端面型线相同、旋向相反且能够自啮合,实现了型线的对称性以及第一螺杆转子和第二螺杆转子的结构一致性,从而提高第一螺杆转子和第二螺杆转子匹配啮合程度,提高了加工效率并且降低了加工成本,与现有的真空泵或常规泵相比,结构更加紧凑,并且避免了出现过渡不良的现象,实现了两个螺杆转子在工作中能够严密啮合。
- 还没有人留言评论。精彩留言会获得点赞!