单比例双控机构的制作方法
本技术实施例涉及液压控制,具体涉及一种单比例双控机构。
背景技术:
1、生产中,经常将油缸的活动杆与工件连接,通过液压系统控制油缸活动杆的往复运动,实现对工件的移动(升降)。
2、且可以在油路中设置电比例流量阀,通过控制电比例流量阀的电流,从而控制油的流量,实现对工件运动速度的控制。
3、本申请的发明人发现,目前对油缸活动杆往复运动的速度控制,需要通过两个控制阀实现,使得液压系统的电控机构和油路较为复杂,给液压系统的维修与保养增加了难度;且高精度的控制阀价格昂贵,增加了生产成本。
技术实现思路
1、本实用新型的目的在于提供一种单比例双控机构,以解决上述背景技术中的问题。
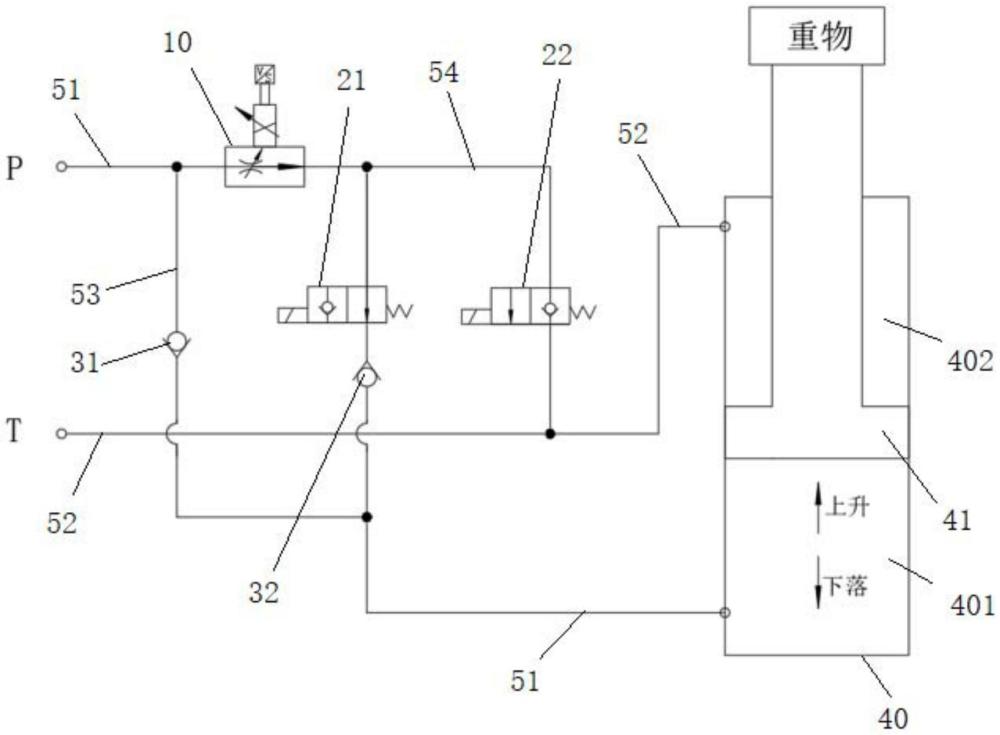
2、本实用新型实施例提供一种单比例双控机构,包括:电比例流量阀、第一电磁阀、第二电磁阀、第一单向阀、第二单向阀、油缸、第一油路、第二油路和支路油路;
3、所述油缸的腔体内设有活动杆,所述活动杆将所述油缸的腔体分隔成无杆腔和有杆腔,且所述活动杆的一端伸出所述油缸,用于与工件连接;
4、所述第一油路和所述第二油路的一端分别用于与液压供油系统连接,另一端分别与所述无杆腔和所述有杆腔连接;
5、所述支路油路并联在所述第一油路上,所述第一单向阀设置在所述支路油路上,所述第一单向阀用于阻断所述第一油路的入口端向所述无杆腔方向的连通;
6、所述电比例流量阀、所述第一电磁阀和所述第二单向阀依次的设置在所述第一油路上,且位于所述支路油路与所述第一油路的两个连接点之间,所述第一电磁阀为常开状态,所述第二单向阀用于阻断所述无杆腔向所述第一油路的入口端方向的连通;
7、所述电比例流量阀还通过第三油路与所述第二油路连接,所述第二电磁阀设置在所述第三油路上,所述第二电磁阀为常闭状态。
8、基于上述方案可知,本实用新型的单比例双控机构,通过设置电比例流量阀、第一电磁阀、第二电磁阀、第一单向阀、第二单向阀、油缸、第一油路、第二油路和支路油路,第一油路和第二油路的一端分别与液压供油系统连接,另一端分别与油缸的无杆腔和有杆腔连接,支路油路并联在第一油路上,第一单向阀设置在支路油路上,电比例流量阀、第一电磁阀和第二单向阀依次的设置在第一油路上,第一电磁阀为常开状态,电比例流量阀还通过第三油路与第二油路连接,第二电磁阀设置在第三油路上,第二电磁阀为常闭状态。本实用新型的单比例双控机构,工件在上升阶段时,液压供油系统的油进入第一油路,依次的通过电比例流量阀、第一电磁阀(常开)、第二单向阀到达油缸的无杆腔,推动活动杆向上,有缸腔内的油通过第二油路回到液压供油系统,实现油缸活动杆的上升,调节电比例流量阀的电流大小控制油的流量,实现比例控制油缸的活动杆的上升速度;工件在下落阶段时,油缸无杆腔内的油进入第一油路,再依次的经过第一单向阀、电比例流量阀、第二电磁阀进入到第二油路,通过第二油路回到液压供油系统,实现油缸活动杆的下落。调节电比例流量阀的电流大小控制油的流量,实现比例控制油缸活动杆的下落速度。通过单个电比例流量阀同时控制工件的升降速度,机构的油路、电控系统更加简单,也大幅降低生产成本。
9、在一种可行的方案中,所述第一电磁阀和所述第二电磁阀均为插装式电磁阀。
10、在一种可行的方案中,所述第三油路与所述第一油路连接,连接点位于所述电比例流量阀与所述第一电磁阀之间,使所述电比例流量阀与所述第二油路连接。
技术特征:
1.一种单比例双控机构,其特征在于,包括:电比例流量阀、第一电磁阀、第二电磁阀、第一单向阀、第二单向阀、油缸、第一油路、第二油路和支路油路;
2.根据权利要求1所述的单比例双控机构,其特征在于,所述第一电磁阀和所述第二电磁阀均为插装式电磁阀。
3.根据权利要求1所述的单比例双控机构,其特征在于,所述第三油路与所述第一油路连接,连接点位于所述电比例流量阀与所述第一电磁阀之间,使所述电比例流量阀与所述第二油路连接。
技术总结
本技术涉及液压控制技术领域,公开了一种单比例双控机构。本技术的单比例双控机构,包括:电比例流量阀、第一电磁阀、第二电磁阀、第一单向阀、第二单向阀和油缸,油缸的无杆腔和有杆腔分别通过第一油路和第二油路与液压供油系统连接,在第一油路上并联有支路油路,电比例流量阀、第一电磁阀和第二单向阀设置在第一油路上,且电比例流量阀与第二油路连接。本技术的单比例双控机构,工件在上升时,油依次通过电比例流量阀、第一电磁阀、第二单向阀到达无杆腔,工件在下落时,油依次经过第一单向阀、电比例流量阀和第二电磁阀,通过单个电比例流量阀可同时控制工件的升降速度,油路和电控系统更加简单,也大幅降低生产成本。
技术研发人员:李潭潭,刘成涛,徐涛,代正银,冯治,龚强
受保护的技术使用者:上海七洋液压机械有限公司
技术研发日:20230707
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!