一种双目摄像头调节机构的制作方法
[0001]
本实用新型涉及金融设备技术领域,具体为一种双目摄像头调节机构。
背景技术:
[0002]
自助取款机又称atm,意思是自助柜员机,因大部分用于取款,因此多称自助取款机。它是一种高度精密的机电一体化装置,利用磁性代码卡或智能卡实现金融交易的自助服务,代替银行柜面人员的工作。提取现金、查询存款余额、进行账户之间资金划拨、余额查询等工作;还可以进行现金存款(实时入账)、支票存款(国内无)、存折补登、中间业务等工作。持卡人可以使用信用卡或储蓄卡,根据密码办理自动取款、查询余额、转账、现金存款,存折补登,购买基金,更改密码,缴纳手机话费等业务。
[0003]
自助取款机(atm)、自助办证机以及柜员机等金融设备为了业务需求,常常需要设置摄像单元来用于采集用户的人脸信息或者用于监控现场环境等等,现有技术中,传统的金融设备上往往采用在设备的外部设置拨杆等机械结构,用户通过在金融设备的外部操作拨杆等结构来控制摄像单元的转动,以迎合不同拍摄角度或者说不同拍摄位置的要求。
[0004]
但是,现有的用于自助取款机上的双目摄像头主要存在以下缺点:
[0005]
现有的用于自助取款机上的双目摄像头无法跟据人的高矮位置进行摄像头自动调节对准拍照,给人像采集过程带来了极大的不便利。
技术实现要素:
[0006]
本实用新型的目的在于提供一种双目摄像头调节机构,以解决上述背景技术中现有的用于自助取款机上的双目摄像头无法跟据人的高矮位置进行摄像头自动调节对准拍照,给人像采集过程带来了极大的不便利的问题。
[0007]
为实现上述目的,本实用新型提供如下技术方案:一种双目摄像头调节机构,包括机壳和镜头,所述机壳一侧表面对称镶嵌有镜头,所述机壳一侧安装有框体,所述框体内侧安装有伺服马达,所述伺服马达一侧活动连接有偏心轮,所述偏心轮一侧安装有连杆,所述偏心轮底端侧壁焊接有第一连接轴,所述连杆一端安装有第一轴承,所述连杆另一端固定连接有连接块,所述机壳另一侧表面中部对称固定连接有侧板,所述侧板内侧固定连接有圆柱杆,所述机壳两端均设有支撑板,所述支撑板一侧固定连接有第二连接轴,所述支撑板内侧表面镶嵌有第二轴承。
[0008]
优选的,所述框体底部固定连接有安装座,方便对框体安装固定。
[0009]
优选的,所述伺服马达的输出端转动连接有传动轴,且传动轴与偏心轮顶端侧壁相连,通过伺服马达接通电源后,可驱动偏心轮做偏心运动,从而使连杆带动机壳调节角度。
[0010]
优选的,所述第一连接轴与第一轴承的内圈转动连接,所述连接块位于侧板内侧,且圆柱杆贯穿连接块,通过偏心轮带动连杆运转时,通过连杆两端分别与第一连接轴和圆柱杆转动连接,从而可使连杆配合偏心轮对机壳的角度进行调整。
[0011]
优选的,所述第二连接轴与第二轴承的内圈转动连接,可使机壳底部绕第二连接轴转动,从而方便对机壳的角度进行调节。
[0012]
优选的,所述支撑板底部设有载板,且载板一端与框体底部固定相连,通过载板一端与框体底部固定相连,并通过载板上表面端部固定连接有支撑板,从而对机壳起到支撑的作用,可使机壳在角度调整的过程中更加的稳定。
[0013]
本实用新型提供了一种双目摄像头调节机构,具备以下有益效果:
[0014]
本实用新型通过伺服马达外接银行的后台控制系统,通过伺服马达驱动偏心轮转动时,通过偏心轮的远端带动连杆移动至左侧时,连杆一端通过第一轴承与偏心轮远端的第一连接轴转动连接,而且连杆另一端通过连接块与圆柱杆转动连接,并通过机壳底部第二连接轴与第二轴承之间转动连接,从而使机壳与水平面之间呈仰角设置,可对身高较高的使用者进行拍摄,通过通过偏心轮的远端带动连杆移动至右侧时,使机壳与水平面之间呈俯角设置,可对身高较矮的使用者进行拍摄,从而使采像过程更加的便利。
附图说明
[0015]
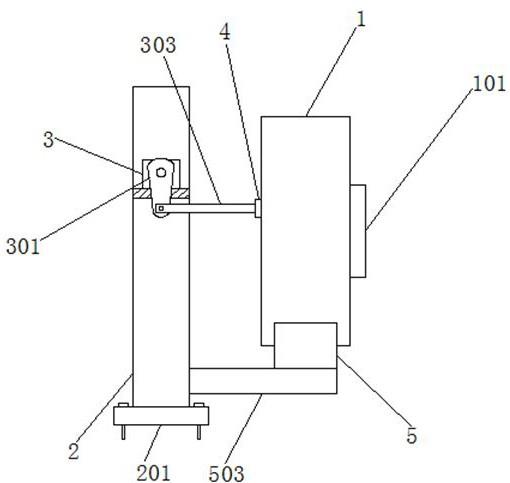
图1为本实用新型的整体结构示意图;
[0016]
图2为本实用新型的机壳正面结构示意图;
[0017]
图3为本实用新型的偏心轮及附属结构侧面结构示意图;
[0018]
图4为本实用新型的侧面正面结构示意图;
[0019]
图5为本实用新型的框体内侧结构示意图。
[0020]
图中:1、机壳;101、镜头;2、框体;201、安装座;3、伺服马达;301、偏心轮;302、传动轴;303、连杆;304、第一连接轴;305、第一轴承;306、连接块;4、侧板;401、圆柱杆;5、支撑板;501、第二连接轴;502、第二轴承;503、载板。
具体实施方式
[0021]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
[0022]
如图1-5所示,本实用新型提供一种技术方案:一种双目摄像头调节机构,包括机壳1和镜头101,所述机壳1一侧表面对称镶嵌有镜头101,所述机壳1一侧安装有框体2,所述框体2内侧安装有伺服马达3,所述伺服马达3一侧活动连接有偏心轮301,所述偏心轮301一侧安装有连杆303,所述偏心轮301底端侧壁焊接有第一连接轴304,所述连杆303一端安装有第一轴承305,所述连杆303另一端固定连接有连接块306,所述机壳1另一侧表面中部对称固定连接有侧板4,所述侧板4内侧固定连接有圆柱杆401,所述机壳1两端均设有支撑板5,所述支撑板5一侧固定连接有第二连接轴501,所述支撑板5内侧表面镶嵌有第二轴承502。
[0023]
通过伺服马达3外接银行的后台控制系统,通过伺服马达3驱动偏心轮301转动时,通过偏心轮301的远端带动连杆303移动至左侧时,连杆303一端通过第一轴承305与偏心轮301远端的第一连接轴304转动连接,而且连杆303另一端通过连接块306与圆柱杆401转动连接,并通过机壳1底部第二连接轴501与第二轴承502之间转动连接,从而使机壳1与水平面之间呈仰角设置,可对身高较高的使用者进行拍摄,通过偏心轮301的远端带动连杆303
移动至右侧时,使机壳1与水平面之间呈俯角设置,可对身高较矮的使用者进行拍摄,从而使采像过程更加的便利。
[0024]
所述框体2底部固定连接有安装座201,方便对框体2安装固定。
[0025]
所述伺服马达3的输出端转动连接有传动轴302,且传动轴302与偏心轮301顶端侧壁相连,通过伺服马达3接通电源后,可驱动偏心轮301做偏心运动,从而使连杆303带动机壳1调节角度。
[0026]
所述第一连接轴304与第一轴承305的内圈转动连接,所述连接块306位于侧板4内侧,且圆柱杆401贯穿连接块306,通过偏心轮301带动连杆303运转时,通过连杆303两端分别与第一连接轴304和圆柱杆401转动连接,从而可使连杆303配合偏心轮301对机壳1的角度进行调整。
[0027]
所述第二连接轴501与第二轴承502的内圈转动连接,可使机壳1底部绕第二连接轴501转动,从而方便对机壳1的角度进行调节。
[0028]
所述支撑板5底部设有载板503,且载板503一端与框体2底部固定相连,通过载板503一端与框体2底部固定相连,并通过载板503上表面端部固定连接有支撑板5,从而对机壳1起到支撑的作用,可使机壳1在角度调整的过程中更加的稳定。
[0029]
需要说明的是,一种双目摄像头调节机构,在工作时,机壳1一侧表面对称镶嵌有镜头101,机壳1一侧安装有框体2,框体2内侧安装有伺服马达3,伺服马达3一侧活动连接有偏心轮301,偏心轮301一侧安装有连杆303,偏心轮301底端侧壁焊接有第一连接轴304,连杆303一端安装有第一轴承305,连杆303另一端固定连接有连接块306,机壳1另一侧表面中部对称固定连接有侧板4,侧板4内侧固定连接有圆柱杆401,机壳1两端均设有支撑板5,支撑板5一侧固定连接有第二连接轴501,支撑板5内侧表面镶嵌有第二轴承502,通过伺服马达3外接银行的后台控制系统,通过伺服马达3驱动偏心轮301转动时,通过偏心轮301的远端带动连杆303移动至左侧时,连杆303一端通过第一轴承305与偏心轮301远端的第一连接轴304转动连接,而且连杆303另一端通过连接块306与圆柱杆401转动连接,并通过机壳1底部第二连接轴501与第二轴承502之间转动连接,从而使机壳1与水平面之间呈仰角设置,可对身高较高的使用者进行拍摄,通过偏心轮301的远端带动连杆303移动至右侧时,使机壳1与水平面之间呈俯角设置,可对身高较矮的使用者进行拍摄,从而使采像过程更加的便利,框体2底部固定连接有安装座201,方便对框体2安装固定,伺服马达3的输出端转动连接有传动轴302,且传动轴302与偏心轮301顶端侧壁相连,通过伺服马达3接通电源后,可驱动偏心轮301做偏心运动,从而使连杆303带动机壳1调节角度,第一连接轴304与第一轴承305的内圈转动连接,连接块306位于侧板4内侧,且圆柱杆401贯穿连接块306,通过偏心轮301带动连杆303运转时,通过连杆303两端分别与第一连接轴304和圆柱杆401转动连接,从而可使连杆303配合偏心轮301对机壳1的角度进行调整,第二连接轴501与第二轴承502的内圈转动连接,可使机壳1底部绕第二连接轴501转动,从而方便对机壳1的角度进行调节,支撑板5底部设有载板503,且载板503一端与框体2底部固定相连,对机壳1起到支撑的作用,伺服马达3型号可选用为xd-37gb3525。
[0030]
尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1