Ω形驱动装置和医学装置的制作方法
ω
形驱动装置和医学装置
技术领域
1.本实用新型涉及ω形驱动装置(omega
‑
antriebseinrichtung)、尤其用于医学装置的ω形驱动装置。ω形驱动装置优选地使用在医学装置的驱动轴线中。本实用新型还涉及医学装置、尤其医学成像装置。本实用新型尤其涉及医学成像装置、尤其x射线装置,所述医学成像装置具有至少一个成像部件,所述至少一个成像部件用于产生在检查区域中支承的检查对象、尤其患者的图像数据,所述成像部件关于检查区域沿着圆弧形的线性引导部可运动地支承,使得成像部件可以借助于可受拉负荷的调节机构关于通过检查区域延伸的轨道旋转轴线定位在不同的轨道角度位置中。
背景技术:
2.医学成像装置的成像部件、例如x射线辐射器或x射线探测器通常可运动地支承,以便例如从不同观察方向检测投影图像。从不同方向拍摄检查对象尤其在断层扫描或断层合成中是常见的,以便从检测到的投影中对三维图像数据进行数字重建。
3.从现有技术中尤其已知c型臂x射线装置,其中,x射线辐射器和x射线探测器分别设置在c形承载臂(也称为:c型臂)的端侧处。承载臂可以围绕两个彼此正交的旋转轴线旋转,所述旋转轴线通常称为轨道旋转轴线和角旋转轴线。
4.在已知的c型臂x射线装置中,承载臂围绕轨道旋转轴线的调节例如借助于ω形驱动装置来实现。这种ω形驱动装置通常具有齿带作为调节机构,所述齿带沿着线性引导部张紧,所述线性引导部沿着c型臂延伸。在齿带断裂的情况下,c型臂可以独立运动,并且因此对于治疗室中的患者和工作人员呈现高的受伤风险。
技术实现要素:
5.基于所述现有技术,本实用新型的目的是为借助于ω形驱动装置可运动的部件、尤其医学装置提供有效保险。
6.所述目的通过根据本实用新型的一种ω形驱动装置来解决。
7.本实用新型的有利的设计方案是下文的主题。
8.用于医学装置、尤其医学成像装置的ω形驱动装置具有沿着线性引导部引导的且可受拉负荷的调节机构,以及可以沿着可受拉负荷的调节机构移动的驱动单元。驱动单元包括至少一个可运动地支承的且被弹簧加载的引导机构以及以马达方式驱动的驱动轮。可受拉负荷的调节机构经由至少一个被弹簧加载的引导机构以及经由驱动轮的至少一个环周部段被引导。至少一个被弹簧加载的引导机构构成用于沿着可受拉负荷的调节机构施加拉负荷。通过至少一个被弹簧加载的引导机构实现安全装置,所述安全装置构成用于根据沿着调节机构作用的拉应力来释放和阻止驱动单元相对于线性引导部的运动。
9.能够实现所支承的部件或组件彼此的一维相对运动的机械引导部尤其视为在本说明书的意义上的线性引导部。线性引导部尤其可以直线地构造或具有曲率。在设计方案中,线性引导部尤其可以具有至少一个圆弧形的部段或构造为圆弧引导部。
10.例如,借助于线性引导部,医学装置的部件彼此可运动地支承。医学装置例如是检查床(也称为:患者台、检查台),支架、尤其天花板支架或地板支架,或医学成像装置、尤其放射学的医学成像装置。理解的是,该列表不是封闭式的。上述ω形驱动装置可以在医学装置的几乎任意构造的驱动轴线中使用,其中,部件或部件的组件彼此进行线性运动。这种部件或部件的组件尤其可以间接地在线性引导部处可运动地支承。在间接的紧固或支承的情况下,尤其考虑如下设置:其中,上述部件或组件经由紧固部件例如承载件等耦联在线性引导部上。
11.驱动单元可以沿着线性引导部移动。与驱动单元间接或直接连接的部件或组件尤其可以关于与线性引导部间接或直接连接的部件彼此调节。在常规运行中,沿着线性引导部引导的调节机构处于拉应力下,所述拉应力通过至少一个被弹簧加载的引导机构提供。在这种情况下,安全装置释放可调节支承的部件彼此沿着线性引导部的运动。如果沿着调节机构作用的拉应力明显减小,则安全装置接合并且阻止沿着线性引导部的运动,以便尤其避免可运动地支承的部件的不受控制的运动,并且大大降低损伤危险。断裂的调节机构尤其可以导致拉应力的降低或减小。因此,基本上提出使用在正常运行中沿着调节机构作用的拉应力作为用于可能的失效的指示。
12.在设计方案中,调节机构构成为:皮带,尤其齿带;绳,尤其金属线绳、绳索或链条。
13.在设计方案中,至少一个被弹簧加载的引导机构构成用于在通过调节机构提供的拉应力下抵抗弹簧负荷被保持在释放位置中,在所述释放位置中,成像部件沿着线性引导部的运动被释放。引导机构尤其借助于弹簧机构例如螺栓弹簧、拉力弹簧、压力弹簧、板簧、气压弹簧等抵抗可以通过调节机构提供的拉应力而弹性预紧,使得当拉应力降低时,引导机构可以通过弹力来运动。引导机构尤其可以线性可运动地或者可枢转地支承。
14.在设计方案中,至少一个被弹簧加载的引导机构构成用于,如果沿着调节机构作用的拉应力达到或低于下限值,则所述引导机构通过弹力运动到接合位置中,在所述接合位置中,驱动单元相对于线性引导部的运动被阻止。达到或低于下限值尤其表示失效、例如调节机构断裂。在设计方案中,下限值由通过弹簧机构施加的弹力限定,使得尤其在失效的情况下,所述保险完全以机械工作原理为基础。如此构成的安全装置的特征尤其在于高稳健性和降低的易受干扰性。
15.在设计方案中,至少一个被弹簧加载的引导机构朝向线性引导部弹性预紧。
16.在设计方案中,至少一个被弹簧加载的引导机构具有接合面,所述接合面构成用于通过力配合、摩擦配合和/或形状配合的接合来阻止驱动单元相对于线性引导部的运动。接合面尤其在接合位置中作用于线性引导部,以便停止和阻止借助于线性引导部可运动地支承的部件或组件的不受控制的运动。
17.优选地,接合面具有表面结构、覆层或衬面,所述衬面尤其增大线性引导部与接合面之间的摩擦。
18.在设计方案中,至少一个被弹簧加载的引导机构包括杠杆臂,所述杠杆臂被可枢转地支承且关于其旋转轴线弹性预紧,在所述杠杆臂的自由端部处设置有接合面。杠杆臂的如下端部视为自由端部:在杠杆臂围绕其旋转轴线枢转时,所述端部在圆形轨迹上运动。在释放位置中,自由端部或接合面尤其与线性引导部间隔开。在接合位置中,自由端部以接合面贴靠在线性引导部处,以便阻止沿着线性引导部的运动。
19.在设计方案中,至少一个被弹簧加载的引导机构包括换向辊。调节机构至少经由换向辊的环周部段被引导。换向辊安装在杠杆臂上,使得具有接合面的自由端部在换向辊前的端侧突出。通过杠杆臂围绕其旋转轴线的偏转,可以将接合面与线性引导部相接合,以便阻止沿着线性引导部的运动。
20.在设计方案中,至少一个被弹簧加载的引导机构包括另一杠杆臂,所述另一杠杆臂被可枢转地支承且关于其旋转轴线弹性预紧,在所述另一杠杆臂的自由端部处设置有另一接合面,所述另一接合面构成用于通过力配合、摩擦配合和/或形状配合的接合来阻止驱动单元相对于线性引导部的运动。在另一杠杆臂上安装有另一换向辊,使得具有另一接合面的自由端部在另一换向辊前的端侧突出。换言之,设置有在弹性预紧的杠杆臂上支承的两个换向辊,所述换向辊在正常运行中张紧调节机构并且同时实现安全装置,在失效的情况下,所述换向辊禁止可运动地支承的部件的运动。具有分别在端侧设置的接合面的两个杠杆臂尤其可以设计成,在接合时,阻止沿着线性引导部在各一个方向上的运动,在圆弧形线性引导部的情况下,阻止尤其关于旋转轴线的运动。
21.在设计方案中,以马达方式驱动的驱动轮设置在换向辊与另一换向辊之间。
22.上述安全装置可以作为ω形驱动装置的一部分特别简单地集成在现有医学装置、尤其医学成像的现有医学装置中。以这种方式尤其可以节省结构空间。
23.上述ω形驱动装置优选地在医学装置、尤其医学成像装置的驱动轴线中使用。医学装置例如涉及检查床或支架、尤其例如放射学的医学装置的地板支架或天花板支架。驱动轴线例如可以涉及高度调节或部件在水平面中的调节。在其他应用中,所述驱动轴线例如涉及部件沿着圆弧引导部的调节。
24.在设计方案中,医学装置构成为医学成像装置。沿着欧米伽驱动单元的线性引导部可运动地支承有至少一个成像部件。
25.可运动地支承的成像部件例如包括x射线探测器、尤其平面图像探测器,以及x射线辐射器(也称为:x射线发射器、x射线管),尤其具有光圈单元的x射线辐射器。成像部件尤其可以间接地在线性引导部处可运动地支承。例如至少一个成像部件借助于ω形驱动装置在垂直方向上可调节地支承在地板支架或天花板支架处。
26.在医学装置、尤其x射线装置的设计方案中,至少一个成像部件为了产生在检查区域中支承的检查对象、尤其患者的图像数据而关于检查区域沿着线性引导部、尤其圆弧形的线性引导部可运动地支承,使得至少一个成像部件关于通过检查区域延伸的轨道旋转轴线可定位且可锁止在不同的角度位置中。ω形驱动装置构成用于围绕轨道旋转轴线来调节成像部件。调节机构与安全装置如此有效连接,使得可以根据沿着调节机构作用的拉应力来释放和阻止成像部件沿着线性引导部的运动。
27.在设计方案中,医学装置构成为c型臂x射线装置。在医学成像装置构成为c型臂x射线装置的设计方案中,圆弧形的线性引导部尤其可以由c形承载臂(也称为:c型臂)形成,成像部件、尤其至少一个x射线辐射器和至少一个x射线探测器紧固在所述c形承载臂上。承载臂可围绕轨道旋转轴线运动,并且还可以以本身已知的形式和方式围绕角旋转轴线枢转。
28.在设计方案中,至少一个成像部件沿着圆弧形的线性引导部在至少140
°
、优选地大约160
°
或更大的角度范围上可运动地支承。换言之,线性引导部例如围绕轨道旋转轴线
以至少140
°
的角度范围延伸。
29.在医学装置构成为c型臂x射线装置的设计方案中,调节机构例如可以沿着c形承载臂的背面被引导,因此,所述c形承载臂形成用于围绕轨道旋转轴线调节成像部件的圆弧形的线性引导部或圆弧引导部。在这种设计方案中,调节机构优选地构成为皮带或齿带,所述皮带或齿带分别紧固在承载臂的端侧上。调节机构、典型地皮带或齿带紧固在圆弧引导部上,并且至少部段地在切向方向上经由圆弧引导部以及经由被弹簧加载的引导机构被引导。
附图说明
30.对于本实用新型的进一步描述参照在附图中示出的实施例。在示意图中示出:
31.图1在示意性截面图中示出医学成像装置,所述医学成像装置具有用于关于轨道旋转轴线定位且锁止承载成像部件的承载臂的调节机构;
32.图2示出用于调节在图1中示出的承载臂的ω形驱动装置的细节,其中,成像部件的运动被释放;
33.图3示出用于调节在图1中示出的承载臂的ω形驱动装置的细节,其中,成像部件的运动被释放。
具体实施方式
34.在所有附图中,彼此对应的部件设置有相同的附图标记。
35.图1至图3示出医学成像装置1,所述医学成像装置在示例性示出的设计方案中构成为c型臂x射线装置。医学成像装置1包括c形承载臂2,所述c形承载臂例如经由未详细示出的天花板支架紧固在房间天花板上。
36.在另一设计方案中,承载臂2经由地面支架与房间地板连接。替选地可以提出,例如将承载臂2设置在可以自由定位在房间中的可活动或可移动的基站处。
37.在承载臂2的相对置的端部处,设置有医学成像装置1的成像部件4。成像部件4包括具有光圈单元8的x射线辐射器6。另一成像部件4包括x射线探测器10、尤其平面图像探测器。x射线辐射器6和x射线探测器10围绕处于其间的检查区域u彼此相对置地设置。成像部件4可以关于两个彼此垂直延伸的旋转轴线、轨道旋转轴线d1和角旋转轴线d2设置在围绕检查区域的不同的角度位置中,以便例如从不同观察方向检测待检查区域的投影。
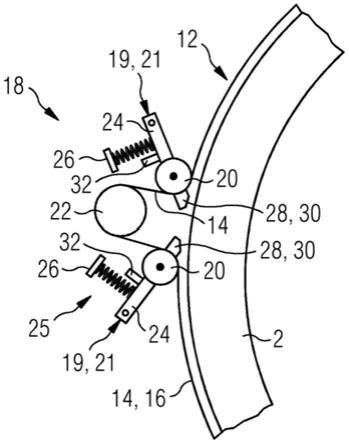
38.为了使成像部件4围绕轨道旋转轴线d1旋转,承载臂2的径向处于外部的侧形成圆弧形的线性引导部12,在所述线性引导部上,紧固有皮带14、尤其齿带,或者所述皮带、尤其齿带至少部段地以摩擦配合的方式贴靠在所述线性引导部处。皮带14形成用于关于轨道旋转轴线d1调节成像部件4的调节机构16,所述调节机构16由ω形驱动装置18驱动。ω形驱动装置18具有引导机构19,所述引导机构包括两个换向辊20并且实现安全装置21,皮带14围绕所述两个换向辊的环周部段引导。在两个换向辊20之间设置有以马达方式驱动的驱动轮22。皮带14在大约180
°
的角度范围上围绕驱动轮22被引导。驱动轮22可以由驱动器、尤其由与驱动轮法兰连接的电动马达驱动。以马达方式驱动的驱动轮22和换向辊20可以作为驱动单元25沿着线性引导部12移动。因此,可以相对于与线性引导部12间接或直接连接的部件朝向线性引导部12来调节间接或直接紧固在驱动单元25上的部件。
39.ω形驱动装置18的细节尤其在图2中示出。换向辊20安装在可枢转支承的杠杆臂24上,所述杠杆臂借助于弹簧机构26朝向线性引导部12弹性预紧。
40.杠杆臂24具有接合面28,所述接合面28构成用于以力配合、摩擦配合和/或形状配合的方式贴靠在线性引导部12处,并且因此阻止成像部件4围绕轨道旋转轴线d1的运动。接合面28例如具有呈沟纹形式的表面结构、覆层和/或一种类型的制动衬面,并且设置在杠杆臂24的可运动的自由端部30处。具有接合面28的自由端部30在换向辊20前径向突出,使得所述自由端部可以根据杠杆臂24的角度位置尤其以摩擦配合的方式与线性引导部12接合。
41.在图2中示出的位置中,杠杆臂24定位在释放位置中,也就是说,接合面28不贴靠在形成线性引导部12的承载臂2的外侧处。杠杆臂24抵抗弹簧机构26的弹力压靠止挡部32。为此所需的力通过皮带14提供,所述皮带在医学成像装置1的正常运行期间处于拉应力或拉负荷下。
42.图3示例性示出一种情况,在所述情况中,杠杆臂24中的一个杠杆臂阻止成像部件4沿着线性引导部12在顺时针方向上的运动。所述情况例如在如下情况下出现:皮带14断裂或沿着皮带14作用的拉负荷由于其他原因而下降到低于下限值,使得由弹簧机构26提供的弹力将杠杆臂24推离止挡部32并且压靠承载臂2的外侧。在图3中仅示出处于接合位置的两个杠杆臂24中的上部的杠杆臂。图2中所示的下部的杠杆臂24对应地在接合位置中也贴靠在线性引导部12处,使得成像部件4沿着逆时针方向的运动被阻止。
43.尽管已经参照优选的实施例详细地说明和描述了本实用新型,但是本实用新型不通过所述实施例限制,并且可以由本领域技术人员从中推导出其他变型方案,而不脱离本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1