一种巡检机器人及其轮系机构的制作方法
1.本实用新型涉及一种巡检机器人及其轮系机构。
背景技术:
2.随着大数据、云计算等互联网应用的井喷式发展,承担核心工作的各种计算机服务器数量也呈现出指数级的增加,为确保各种互联网应用和功能能够长期稳定运行,必须对数以百万计的服务器进行定期巡检。机房巡检机器人,搭载可见光相机、热成像相机、空气质量检测传感器等,可实现指示灯显示状态的视觉判断、温度检测、空气质量检测等多种功能。通过机器人自主进行机房的定期巡检,可大大降低机房运维的人工成本,同时提高巡检的及时性和准确性。但现有技术中,会出现安装完成后机器人重心出现偏移的情况,再者,机器人在使用一段时间后,其主动轮的上下运动可能出现不够顺滑的情况,这两种情况都会影响机器人的正常使用。
技术实现要素:
3.本实用新型的目的是针对现有技术的不足,提出一种巡检机器人及其轮系机构,能够及时方便地调整机器人重心,且保证机器人运动的顺滑性,避免影响机器人的正常使用。
4.本实用新型通过以下技术方案实现:
5.一种巡检机器人的轮系机构,巡检机器人包括支撑板,轮系机构包括支撑架、两导向杆、两滑块、两弹性机构、调整机构和行走机构,支撑架设置在支撑板上,两导向杆竖直间隔设置在支撑架与支撑板之间,两滑块分别套设在两导向杆下部,弹性机构设置在导向杆与滑块上端之间,调整机构设置在弹性机构上端与导向杆之间以调整弹性机构的位置,行走机构设置在两滑块之间,滑块内侧设置有螺旋的导油槽,滑块外侧设置有用于放置润滑脂的油腔和用于封闭油腔的密封盖,油腔内侧设置有与导油槽连通的漏油口。
6.进一步的,所述滑块包括矩形块,矩形块上设置有供导向杆穿过的通孔,所述油腔设置在通孔内侧,矩形块一边设置有向外的凸出块,所述导油槽设置在凸出块上部,所述漏油口设置在导油槽底部。
7.进一步的,所述弹性机构包括弹簧,所述矩形块顶端设置有与弹簧匹配的安装槽,弹簧上端与所述调整机构连接。
8.进一步的,所述调整机构包括设置在导向杆上部的螺纹和与螺纹匹配的螺母,所述弹簧上端与螺母连接。
9.进一步的,所述行走机构包括安装板、减速器、驱动机构、法兰和主动轮,安装板设置在两滑块外侧之间,减速器由安装板内侧向外伸出,法兰设置在减速器伸出安装板的一端,主动轮通过法兰与减速器连接,驱动电机与减速器另一端连接。
10.进一步的,轮系机构还包括设置在支撑板四角的四个万向轮。
11.进一步的,所述密封盖由橡胶材料制成。
12.本实用新型还通过以下技术方案实现:
13.一种巡检机器人,包括支撑板和如上任一所述的两轮系机构,两轮系机构相对设置在支撑板两侧。
14.本实用新型具有如下有益效果:
15.1、本实用新型通过调整机构可调整支撑板的倾斜度,以此来补偿机器人安装完成时发生的重心偏移,操作简单方便;另一方面,机器人行驶时,地面的支撑力通过行走机构传导至滑块,滑块在向上的力的作用下会向上滑动压缩弹簧,当弹簧的弹性力和地面的支撑力一样时,轮系系统处于即处于平衡状态,机器人能够平稳行驶,因此滑块在机器人行驶过程中,会沿导向杆上下滑动,使用一段时间后,难免会变得不够顺滑,本实用新型在滑块外侧设置有用于放置润滑脂的油腔,油腔内侧设置有与导油槽连通的漏油口,滑块在导向杆上滑动时,润滑脂能够通过漏油口渗入导油槽内,从而涂抹在导向杆上,保证滑块(即主动轮)的顺滑性,避免影响机器人的正常使用;再者,因润滑脂是一种胶状物,其会慢慢渗入导油槽,不会出现因流入导油槽速度过快而导致消耗过快以及导油槽内油过多的情况,使用安全方便。
16.2、本实用新型的调整机构包括设置在导向杆上部的螺纹和与螺纹匹配的螺母,需要调节时,调节螺母位置即可调整弹簧在导向轴上的位置,操作简单方便。
附图说明
17.下面结合附图对本实用新型做进一步详细说明。
18.图1为本实用新型的结构示意图(主要显示直线模组前侧部分)。
19.图2为本实用新型的结构示意图(主要显示直线模组后侧部分)。
20.图3为图1中a部分的放大图。
21.图4为本实用新型辅助机构的结构示意图。
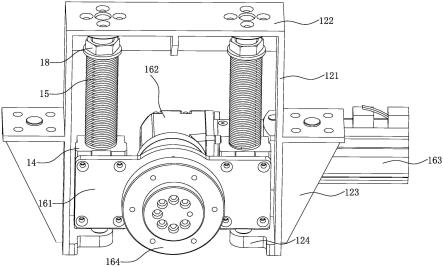
22.图5为本实用新型轮系机构的结构示意图。
23.图6为本实用新型滑块的结构示意图(显示导油槽)。
24.图7为本实用新型滑块的结构示意图(显示油腔)。
25.其中,11、支撑板;12、支撑架;121、第四竖板;122、第二横板;123、支撑块;124、锁紧板;14、滑块;141、导油槽;142、凸出块;143、油腔;144、漏油口;145、安装槽;15、弹性机构;161、安装板;162、l型减速器;163、驱动机构;164、法兰;165、主动轮;166、防护罩;17、辅助机构;171、固定块;172、气压泵;173、空心杆;174、连接杆;175、万向轮;18、调整机构;21、竖直部件;22、第一横杆;23、第一竖杆;24、y型板;25、l型板;26、折弯板;27、第一竖板;28、轨道;29、折弯部;31、第一横板;32、第二竖板;33、第一斜板;34、第二腰孔;4、直线模组;41、第二滑块;5、拍摄机构;51、拍摄支架;52、转动机构;53、红外相机;54、可见光相机;6、雷达装置;61、第三竖板;62、安装座;63、第三腰孔;64、圆孔;71、第一固定机构;711、固定板;712、连接板;713、第一腰孔;72、语音对讲装置;73、触摸屏;811、第二竖杆;812、第二横杆;82、视觉跟随装置;83、人脸识别装置;9、供电装置。
具体实施方式
26.如图1至图7所示,巡检机器人包括底盘和设置在底盘上的机器人主体,底盘包括
水平布置的支撑板11、设置在支撑板11上的控制装置和相对设置在支撑板11两侧的两轮系机构,轮系机构包括支撑架12、两导向杆、两滑块14、两弹性机构15、调整机构18、行走机构和设置在支撑脚四角的四个辅助机构17,支撑架12设置在支撑板11上,两导向杆竖直间隔设置在支撑架12与支撑板11之间,两滑块14分别套设在两导向杆下部,弹性机构15设置在导向杆与滑块14上端之间,调整机构18设置在弹性机构15上端与导向杆之间以调整弹性机构15的位置,行走机构设置在两滑块14之间,滑块14内侧设置有螺旋的导油槽141,滑块14外侧设置有用于放置润滑脂的油腔143和用于封闭油腔143的密封盖,油腔143内侧设置有与导油槽141连通的漏油口144。
27.滑块14包括矩形块,矩形块上设置有供导向杆穿过的通孔,导油槽141设置在通孔内侧,矩形块一边设置有向外的凸出块142,导油槽141设置在凸出块142上部,具体为凸出块142上向内延伸的凹部,漏油口144设置在导油槽141底部。
28.弹性机构15包括弹簧,矩形块顶端设置有与弹簧匹配的安装槽145,调整机构18包括设置在导向杆上部的螺纹和与螺纹匹配的螺母,弹簧上端与该螺母连接。
29.行走机构包括安装板161、l型减速器162、驱动机构163、法兰164和主动轮65,安装板161设置在两滑块14外侧之间,l型减速器162由安装板161内侧向外伸出,法兰164设置在l型减速器162伸出安装板161的一端,主动轮65通过法兰164与l型减速器162连接,驱动电机与l型减速器162另一端连接。主动轮65上部向上伸出支撑板11,支撑板11上设置有盖住主动轮65的防护罩166。
30.支撑架12包括间隔设置的两第四竖板121、设置在两第四竖板121上端之间的第二横板122、分别设置在两第四竖板121中部外侧的倒三角支撑块123和分别设置在两第四竖板121下端且向内延伸的两锁紧板124,两第四竖板121上半部由支撑板11下侧向上穿出,通过倒三角支撑块123与支撑板11固定,导向杆上端固定在第二横板122上,下端固定在锁紧板124上。
31.在本实施例中,密封盖由橡胶材料制成。驱动机构163为伺服电机。控制装置为plc。
32.辅助机构17包括设置在支撑板11下侧且内部具有腔室的固定块171、设置在固定块171上以封闭或者开启腔室的控制阀、设置在支撑板11上侧且通过管道与腔室连通的气压泵172、设置在固定块171四角且均与腔室连通的四个空心杆173、分别可伸缩地设置在各空心杆173上的四个连接杆174、设置四个连接杆174下端的万向轮175和设置在其中一个连接杆174与万向轮175之间的压力传感器,控制装置分别与驱动机构163、控制阀、气压泵172和压力传感器连接。
33.连接杆174外侧下部设置有向外凸出的限位块,空心杆173内侧设置有可供限位块滑动的凹槽,凹槽下端高于空心杆173下端。
34.机器人主体包括竖直设置在支撑板11后部的安装机构、相对设置在安装机构下端两侧的两个侧向支撑机构、设置在安装机构前侧的直线模组4、可上下移动地设置在直线模组4上的拍摄机构5、设置在支撑板11上且位于直线模组4前侧的雷达装置6、通过第一固定机构71可拆卸地设置在安装机构上的语音对讲装置72和触摸屏73、通过第二固定机构可拆卸地设置在安装机构上的视觉跟随装置82和人脸识别装置83、设置在支撑板11上且位于安装机构后侧的供电装置和设置在支撑板11上的轮系机构。
35.直线模组4具体结构为现有技术,包括可上下滑动的第二滑块41,拍摄机构5包括设置在第二滑块41上的拍摄支架51、设置在拍摄支架51上的转动机构52和分别设置在转动机构52两端的红外相机53和可见光相机54。其中,转动机构52具体结构为现有技术,其作用在于驱动红外相机53和可见光相机54转动。
36.安装机构包括相对设置的两竖直部件21和设置在竖直部件21顶部之间的第一横杆22,竖直部件21包括间隔布置且下端设置在支撑板11上的两呈长方体的第一竖杆23、分别设置在两第一竖杆23外侧的两条竖直棱上的四个y型板24、分别设置在两第一竖杆23内侧的两条竖直棱上的四个l型板25、分别设置在四个y型板24端部的折弯板26、分别设置在两第一竖杆23对应的两l型板25之间的两第一竖板27和多个第一滑块,位于外侧第一竖板27间隔设置在两折弯板26之间,第一竖板27两侧及折弯板26与第一竖板27对应的一侧均设置有向内的折弯部29,y型板24、l型板25、折弯板26、第一竖板27和折弯部29均与第一竖杆23高度相同,第一竖板27分别与两折弯板26之间形成有供第一滑块滑动的轨道28,第一滑块两端与折弯部29匹配,第一滑块上设置有螺孔。
37.侧向支撑机构包括设置在支撑板11上的第一横板31、设置在第一横板31内侧的第二竖板32、分别设置在第一横板31两端与第二竖板32之间的两第一斜板33,第二竖板32上开设有可与第一滑块对应的第二腰孔34,第二腰孔34能够微调侧向支撑机构的位置,又能方便安装。
38.第一固定机构71包括固定板711和分别设置在固定板711两端且向内折弯的连接板712,连接板712上开设有第一腰孔713,安装时,第一滑块滑动至与连接板712对应的位置,将第一螺栓穿过第一腰孔713后锁紧在螺孔内,并使第一螺栓端部抵紧第一竖杆23,第一腰孔713的设置既能够稍微调整固定板711与安装机构之间的距离,又能方便安装。语音对讲装置72包括设置在固定板711上的两个扩音器和四个拾音器。
39.第二固定机构包括分别设置在两竖直部件21位于内侧的第一竖板27内侧的两第二竖杆811和间隔设置在两第二竖杆811上的多个第二横杆812,视觉跟随装置82和人脸识别装置83设置在同一第二横杆812或者不同的第二横杆812上,视觉跟随装置82和人脸识别装置83位于触摸屏73上部。视觉跟随装置82包括深度相机,人脸识别装置83包括人脸识别相机。
40.雷达通过雷达支架设置在支撑板11上,雷达支架包括相对设置在支撑板11上的两第三竖板61和设置在第三竖板61之间的安装座62,一第三竖板61上设置有竖直延伸的第三腰孔63,另一第三竖板61上设置有圆孔64。
41.以上所述,仅为本实用新型的较佳实施例而已,故不能以此限定本实用新型实施的范围,即依本实用新型申请专利范围及说明书内容所作的等效变化与修饰,皆应仍属本实用新型专利涵盖的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1