变速装置的制作方法
1.本发明涉及搭载于轮式装载机、液压挖掘机等车辆的变速装置。
背景技术:
2.例如,专利文献1中记载了通过使行星齿轮机构和电动马达组合而成的行星式无级变速机构来进行动力的传递的工程机械。根据专利文献1的工程机械,通过使用行星式无级变速机构,能够降低发动机的旋转速度的急变,抑制装卸作业机的动作速度急变。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2008-247269号公报(日本专利第5095252号)
技术实现要素:
6.但是,专利文献1所述的技术存在无法有效使用行星式无级变速机构的增速的变速范围的可能性。
7.本发明的一个实施方式的目的为,提供能够有效使用行星式无级变速机构的增速的变速范围的变速装置。
8.本发明的一个实施方式的无级变速装置具有:与动力源相连的输入轴;与负载相连的输出轴;设于所述输入轴与所述输出轴之间的行星机构;与所述行星机构连接的第1变速器;对于所述第1变速器另外设置的第2变速器;和变更所述第1变速器的旋转速度的控制器,所述行星机构的构成包括如下三个部件:行星齿轮架、以所述行星齿轮架的旋转中心轴为中心自转的第1太阳轮部件、和以所述行星齿轮架的旋转中心轴为中心自转的第2太阳轮部件,作为所述行星机构的所述三个部件中的一个的第1部件直接或经由其他部件与所述输入轴连接,所述行星机构的所述三个部件中的除所述第1部件之外的第2部件直接或经由其他部件与所述第1变速器连接,所述行星机构的所述三个部件中的除所述第1部件以及所述第2部件之外的第3部件直接或经由其他部件与所述输出轴连接,在所述行星机构的所述行星齿轮架上,支承有一边在以所述行星齿轮架的旋转中心轴为中心公转的同时与所述第1太阳轮部件和所述第2太阳轮部件一起旋转、一边进行动力传递的行星部件以及平衡部件,所述行星机构将从所述动力源传递至所述行星机构的转矩向所述第2部件和所述第3部件分配,所述行星机构在所述第1部件、所述第2部件和所述第3部件之间进行双自由度的旋转运动,所述第2变速器将从所述第1变速器传递来的动力向所述负载或所述动力源传递,或将从所述负载或所述动力源传递来的动力向所述第1变速器传递,所述控制器通过变更所述第1变速器的旋转速度,而变更相对于所述输入轴的旋转速度的所述输出轴的旋转速度。
9.另外,本发明的一个实施方式的无级变速装置具有:与动力源相连的输入轴;与负载相连的输出轴;设于所述输入轴与所述输出轴之间的行星机构;与所述行星机构连接的第1变速器;对于所述第1变速器另外设置的第2变速器;和变更所述第1变速器的旋转速度
的控制器,所述行星机构的构成包括如下三个部件:行星齿轮架、以所述行星齿轮架的旋转中心轴为中心自转的太阳轮部件、和与所述太阳轮部件相比位于径向外侧并以所述行星齿轮架的旋转中心轴为中心自转的环形部件,作为所述行星机构的所述三个部件中的一个的第1部件直接或经由其他部件与所述输入轴连接,所述行星机构的所述三个部件中的除所述第1部件之外的第2部件直接或经由其他部件与所述第1变速器连接,所述行星机构的所述三个部件中的除所述第1部件以及所述第2部件之外的第3部件直接或经由其他部件与所述输出轴连接,在所述行星机构的所述行星齿轮架上,支承有一边在以所述行星齿轮架的旋转中心轴为中心公转的同时与所述太阳轮部件和所述环形部件一起旋转、一边进行动力传递的行星部件,所述行星机构将从所述动力源传递至所述行星机构的转矩向所述第2部件和所述第3部件分配,所述行星机构在所述第1部件、所述第2部件和所述第3部件之间进行双自由度的旋转运动,所述第2变速器将从所述第1变速器传递来的动力向所述负载或所述动力源传递,或将从所述负载或所述动力源传递来的动力向所述第1变速器传递,所述控制器通过变更所述第1变速器的旋转速度,而变更相对于所述输入轴的旋转速度的所述输出轴的旋转速度,而且,在将通过所述行星机构从所述动力源向所述负载传递动力的动力传递路径设为第1动力传递路径的情况下,具有与所述第1动力传递路径并列设置且不经由所述行星机构而通过齿轮彼此的啮合向所述负载传递动力的第2动力传递路径,所述第2动力传递路径具有切换联结和释放的第1离合器,所述控制器将所述第1离合器联结,而通过所述第2动力传递路径进行动力传递。
10.根据本发明的一个实施方式,能够有效使用构成包括行星机构、第1变速器和第2变速器的行星式无级变速机构的增速的变速范围。
附图说明
11.图1是表示搭载有第1实施方式的变速装置的轮式装载机的左侧视图。
12.图2是表示图1中的变速装置的局部剖切的侧视图。
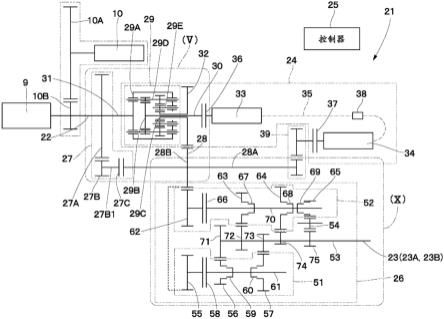
13.图3是表示第1实施方式的变速装置的构成图。
14.图4是将图3中的变速装置与行星机构的内部一起表示的构成图。
15.图5是图4中的(v)部的放大图。
16.图6是从动力源侧观察图4中的行星机构的说明图。
17.图7是表示图4中的行星机构(后述表4的“no1-a”)的各部件的旋转速度的关系的特性线图。
18.图8是表示后述表4的“no1-c”的行星机构的各部件的旋转速度的关系的特性线图。
19.图9是表示后述表4的“no1-b”的行星机构的各部件的旋转速度的关系的特性线图。
20.图10是图4中的(x)部的放大图。
21.图11是表示轮式装载机的车速与牵引力的理想关系的驱动力线图。
22.图12是表示第1实施方式的轮式装载机的车速与牵引力的关系的驱动力线图。
23.图13是表示第1变形例(无外部锁止的构成)的与图3同样的构成图。
24.图14是表示第2变形例(通过制动进行内部锁止的构成)的与图3同样的构成图。
25.图15是表示第3变形例(通过制动进行内部锁止且无惰性元件的构成)与图3同样的构成图。
26.图16是表示搭载了无外部锁止的变速装置的轮式装载机的车速与牵引力的关系的驱动力线图。
27.图17是表示搭载了无内部锁止的变速装置的轮式装载机的车速与牵引力的关系的驱动力线图。
28.图18是表示第4变形例(输入轴与第1太阳轮部件连接且第1变速器与行星齿轮架连接的构成)的与图4同样的构成图。
29.图19是表示第5变形例(输入轴与第1太阳轮部件连接且第1变速器与第2太阳轮部件连接的构成)的与图4同样的构成图。
30.图20是表示第6变形例(第2变速器与输出轴连接的构成)的与图4同样的构成图。
31.图21是表示第2实施方式的与图4同样的构成图。
32.图22是图21中的(xxii)部的放大图。
33.图23是从动力源侧观察图21中的行星机构的说明图。
34.图24是表示图21中的行星机构的三个部件的旋转速度的关系的特性线图。
35.图25是表示第7变形例(输入轴与环形部件连接且第1变速器与行星齿轮架连接的构成)的与图21同样的构成图。
36.图26是表示第8变形例(输入轴与行星齿轮架连接且第1变速器与环形部件连接的构成)的与图21同样的构成图。
37.图27是表示第9变形例(输入轴与环形部件连接且第1变速器与太阳轮部件连接的构成)的与图21同样的构成图。
38.图28是表示第10变形例(输入轴与太阳轮部件连接且第1变速器与环形部件连接的构成)的与图21同样的构成图。
39.图29是表示第11变形例(输入轴与太阳轮部件连接且第1变速器与行星齿轮架连接的构成)的与图21同样的构成图。
40.图30是表示第12变形例(第2变速器与输入轴连接的构成)的与图3同样的构成图。
41.图31是表示第13变形例(第2变速器与跟惰性元件相连的第3连结部件连接的构成)的与图3同样的构成图。
42.图32是表示第14变形例(第2变速器与多级变速机构的奇数挡齿轮连接的构成)的与图3同样的构成图。
43.图33是表示第15变形例(第2变速器与多级变速机构的前进1速齿轮连接的构成)的与图3同样的构成图。
44.图34是表示第16变形例(第2变速器与多级变速机构的前进3速齿轮连接的构成)的与图3同样的构成图。
45.图35是表示第17变形例(第2变速器与多级变速机构的前进2速齿轮连接的构成)的与图3同样的构成图。
46.图36是表示第18变形例(第2变速器与多级变速机构的前进4速齿轮连接的构成)的与图3同样的构成图。
47.图37是表示第19变形例(第2变速器与多级变速机构的后退1速齿轮连接的构成)
的与图3同样的构成图。
48.图38是表示第20变形例(第2变速器与输出轴连接的构成)的与图3同样的构成图。
49.图39是表示第21变形例(第2变速器与变速装置的输出轴相比更加连接于负载侧的构成)的与图3同样的构成图。
具体实施方式
50.以下,以适用于轮式装载机的情况为例,边参照附图边详细说明实施方式的变速装置(变速箱)。
51.图1至图12表示第1实施方式。图1中,轮式装载机1是车辆(作业车辆)的代表例。轮式装载机1作为使设有左、右的前车轮2的前部车身3和设有左、右的后车轮4的后部车身5能够在左、右方向上弯折地连结的铰接式作业车辆而构成。即,前部车身3以及后部车身5构成了轮式装载机1的车身。在前部车身3与后部车身5之间设有中央铰链6、转向液压缸(未图示)。前部车身3和后部车身5通过使转向液压缸伸长或缩短而以中央铰链6为中心在左、右方向上折曲。由此,轮式装载机1能够进行行驶时的操舵。
52.在轮式装载机1的前部车身3,能够进行俯仰动作地设有也被称为作业装置的装卸作业机7。装卸作业机7具有装载铲斗7a。另一方面,在轮式装载机1的后部车身5设有内部为驾驶室的舱室8、发动机9、液压泵10、作为变速箱(动力传递装置)的变速装置21等。发动机9是轮式装载机1的动力源(原动机)。动力源除了由未内燃机的发动机9单体构成之外,例如还可以由发动机和电动马达、或电动马达单体构成。液压泵10与发动机9连接。液压泵10是用于使装卸作业机7动作的液压源。如后述图3等所示,液压泵10经由齿轮10a、10b与发动机9连接。
53.在前部车身3的下侧,设有沿左、右方向延伸的前轴12。在前轴12的两端侧,设有左、右的前车轮2。另一方面,在后部车身5的下侧,设有沿左、右方向延伸的后轴13。在后轴13的两端侧安装有左、右的后车轮4。
54.前轴12经由前传动轴14与变速装置21连接。后轴13经由后传动轴15与变速装置21连接。变速装置21对发动机9的旋转进行增速以及减速并向前传动轴14以及后传动轴15传递。即,来自发动机9的动力向与发动机9结合的变速装置21传递。
55.来自发动机9的动力在由变速装置21调整转速和旋转方向之后,从变速装置21的前、后的输出轴23a、23b经由前传动轴14以及后传动轴15向前轴12以及后轴13传递。即,如图2所示,变速装置21具有与发动机9连接的输入轴22、与前传动轴14连接的前侧的输出轴23a、和与后传动轴15连接的后侧的输出轴23b。变速装置21通过切换变速装置21内的动力传递路径,而在输入轴22与输出轴23a、23b之间进行变速以及正转或倒转的切换。
56.接着说明轮式装载机1的动作。轮式装载机1重复执行以翻斗车装载作业为主体的v型循环、和向料斗等直接投入的称为装运(load and carry)的动作模式。v型循环是在开动后挖掘土砂等并向翻斗车装载的动作模式。装运模式是在开动后挖掘土砂等、且搬运(高负载行驶)、且向翻斗车排土、且回送(低负载行驶)的动作模式。轮式装载机1为了获得对于开动、挖掘、搬运、装载、回送等各种作业状态最佳的行驶速度和驱动力,而需要频繁切换变速装置21。
57.当挖掘以及开动时,变速装置21被要求高牵引力。因此,变速装置21需要使减速比
上升而使输出轴23a、23b的输出转矩上升。而且,即使轮式装载机1的车速为0km/h(输出轴23a、23b的旋转速度为0),也需要将输入轴22的旋转速度保持为规定以上,使得作为动力源的发动机9不停止,需要是变速装置21的变速比为无限大的构造。此外,轮式装载机1的挖掘时的车速例如为0~4km/h。
58.当搬运时,变速装置21为了节省油耗,需要以高传递效率从输入轴22向输出轴23a、23b进行动力传递。搬运时的车速例如为0~13km/h。另一方面,在向翻斗车排土的情况,轮式装载机1一边搬运一边使装卸作业机7上升。因此,若装卸作业机7的上升速度突然变慢,具有装卸作业机7与翻斗车碰撞的可能性。因此,当向翻斗车接近时,希望能够抑制液压泵10的排出流量的剧烈的变化。并且,为此,需要以不会使发动机9的旋转速度急变的方式控制变速装置21。当向翻斗车排土时,用于向翻斗车接近的车速例如为0~7km/h。该车速下,希望能够抑制发动机9的剧烈的旋转速度变动。
59.当在没有货载的状态下行驶于普通道路或作业现场内的回送时,变速装置21为了节省油耗,需要以高传递效率从输入轴22向输出轴23a、23b进行动力传递。回送时的车速例如为0~40km/h。当回送时,不要求装卸作业机7的高操作性。因此,能够允许发动机9的旋转速度的急变。然而,为了节省油耗,需要以比搬运时更高的传递效率从输入轴22向输出轴23a、23b进行动力传递。
60.图11是表示轮式装载机1的理想的驱动力线图。图11中表示有前进方向上的理想的驱动力线lf、和后退方向(后退方向)的理想的驱动力线lr。前进时,当挖掘时要求高牵引力,当回送时要求以高车速(0~40km/h)行驶。另外,轮式装载机1需要在设于采石场等的多种坡度的上坡道路内稳定上坡。因此,例如,当时速3km/h以上时,希望不考虑车速而为等马力的牵引力。
61.图11中的范围a表示为了进行挖掘而要求高牵引力的范围,即,挖掘时的驱动力线的范围a。图11中的范围b表示不考虑车速而要求等马力的牵引力的范围,即,前进方向上的等马力的驱动力线的范围b。图11中,范围c表示不考虑车速而要求等马力的牵引力的范围,即,后退方向上的等马力的驱动力线的范围c。前进方向上的等马力的驱动力线的范围b以及后退方向上的等马力的驱动力线的范围c成立如下的数式1。
62.[数式1]
[0063]
牵引力[n]
×
车速[km/h]
×
(5/18)=固定
[0064]
此外,轮式装载机1在后退方向上不进行挖掘。因此,后退方向上的理想的驱动力线lr的最大牵引力比前进时低。
[0065]
但是,对轮式装载机1等作业车辆使用的变速装置21优选能够切换基于无级变速机构进行的动力传递和基于锁止机构进行的动力传递。该情况下,变速装置21能够有效使用无级变速机构的增速的变速范围。在此基础上,优选为,能够当从基于无级变速机构进行的动力传递切换为基于锁止机构进行的动力传递时,减少车辆的加减速度的变化。另外,在变速器的旋转速度的上限值和可产生(吸收)转矩的上限值被限制的情况下,能够提供行星机构(行星齿轮机构)的变速比(齿轮比)为最佳值的排列(齿轮排列),能够提高无级变速机构的传递效率。
[0066]
因此,如图3以及图4所示,第1实施方式的变速装置21具有一边使行星式无级变速机构24无级变速一边传递动力的模式、使行星式无级变速机构24内部锁止而传递动力的模
式、和通过不经由行星齿轮机构29的外部锁止机构(直结机构27)而传递动力的模式。基于内部锁止的动力传递是通过使行星齿轮机构29的三个旋转部件(例如行星齿轮架、第1太阳齿轮、第2太阳齿轮)中的与第1变速器33相连的旋转部件(例如第1太阳齿轮)的旋转停止而进行的。由此,能够有效使用行星式无级变速机构24的增速的变速范围。
[0067]
另一方面,基于外部锁止的动力传递经由安装于行星式无级变速机构24的外部的外部锁止机构(直结机构27)而进行。该情况下,基于外部锁止的动力传递在使基于行星式无级变速机构24的动力传递停止的状态下进行。该停止是通过使行星齿轮机构29的三个旋转部件(例如行星齿轮架、第1太阳齿轮、第2太阳齿轮)中的与第1变速器33相连的旋转部件(例如第1太阳齿轮)释放(或使转矩降低)而进行的。由此,能够通过内部锁止以高传递效率传递动力,并且能够在行星式无级变速机构24的增速的变速范围内进一步增速而进行动力传递。
[0068]
而且,根据第1实施方式,如图4至图6所示,行星齿轮机构29具有:两个太阳齿轮29b、29c;一边以这两个太阳齿轮29b、29c的中心轴s(图6)为中心公转一边自转的行星齿轮29d以及平衡齿轮29e;和将行星齿轮29d以及平衡齿轮29e能够旋转地支承且以两个太阳齿轮29b、29c的中心轴s为中心自转的一个行星齿轮架29a。由此,行星齿轮机构29能够设为齿轮比为最佳值的齿轮排列。即,通过使用该排列的行星齿轮机构29,即使在使用旋转速度的上限值和可产生(吸收)转矩的上限值被限制的廉价且小型的第1变速器33的情况下,也能够提高行星式无级变速机构24的传递效率。
[0069]
以下,详细说明第1实施方式的变速装置21。此外,在图3中,由方框表示变速装置21的行星齿轮机构29,相对于此,在图4中,表示了行星齿轮机构29的内部,即,行星齿轮机构29的具体的齿轮排列。另外,在图3以及图4中,为了避免附图变复杂,将变速装置21的输出轴23作为向前轴12以及后轴13的双方传递动力的共通的输出轴23(=输出轴23a、23b)来简洁表示。即,图3以及图4中,省略了例如经由中央差速机构等向前侧的输出轴23a和后侧的输出轴23b分配动力的构成。
[0070]
图3以及图4是第1实施方式的变速装置21的机构图,更具体地是具有内部锁止和外部锁止的双方的变速装置21的机构图。变速装置21具有作为输入部件的输入轴22、作为输出部件的输出轴23、作为无级变速机构(主变速机构)的行星式无级变速机构24、和控制器25。另外,更优选为,变速装置21具有作为有级变速机构(副变速机构)的多级变速机构26、和作为外部锁止机构的直结机构27。直结机构27具有当通过直结机构27进行动力的传递时连接的第1离合器27c。另外,变速装置21具有将行星式无级变速机构24、多级变速机构26和直结机构27机械结合的惰性元件28(惰轴28a、惰轮28b)。行星式无级变速机构24构成了第1动力传递路径。直结机构27构成了第2动力传递路径。
[0071]
在变速装置21的输入轴22上连接有发动机9。在输入轴22上设有用于向液压泵10传递动力的齿轮10b。另外,在输入轴22上设有直结机构27的输入齿轮27a。输入轴22经由后述的第2连结部件31与行星式无级变速机构24(更具体地,行星齿轮机构29)连接。另一方面,从变速装置21的输出轴23输出动力。变速装置21的输出轴23兼做后述的多级变速机构26的输出轴53。从输入轴22输入的动力经由行星式无级变速机构24或直结机构27向惰性元件28传递。传递至惰性元件28的动力通过多级变速机构26从输出轴23输出。
[0072]
此外,行星式无级变速机构24通过使对行星齿轮机构29(例如第1太阳齿轮29b)和
第1变速器33进行连接的第1连结部件30停止而形成了内部锁止的状态。该内部锁止的状态例如通过使第1变速器33制动操作而使第1连结部件30停止而形成。在行星式无级变速机构24处于内部锁止的状态下,从输入轴22输入的动力通过“将行星齿轮机构29(例如行星齿轮架29a)与输入轴22连接的第2连结部件31”、“行星齿轮机构29”、和“将行星齿轮机构29(例如第2太阳齿轮29c)与惰性元件28连接的第3连结部件32”而向惰性元件28传递。随后说明这样的内部锁止。
[0073]
第1实施方式中,能够从如下的(a)、(b)、(c)三个路径中,任意选择将从发动机9向输入轴22输入的动力向多级变速机构26传递的动力传递路径。
[0074]
(a)为将从发动机9向输入轴22输入的动力在使行星式无级变速机构24无级变速的状态下向多级变速机构26传递的无级变速路径(经由行星式无级变速机构24的第1动力传递路径)。此时,第1离合器27c被释放,第2离合器36以及第3离合器37被连接(联结)。
[0075]
(b)为将从发动机9向输入轴22输入的动力在使行星式无级变速机构24内部锁止的状态下向多级变速机构26传递的内部锁止路径(经由行星式无级变速机构24的第1动力传递路径)。此时,第1离合器27c被释放,第2离合器36被连接(联结)。第3离合器37根据需要连接(联结)。
[0076]
(c)为将从发动机9向输入轴22输入的动力经由直结机构27向多级变速机构26传递的外部锁止路径(不经由行星式无级变速机构24而经由直结机构27的第2动力传递路径)。此时,第1离合器27c被连接(联结),第2离合器36和第3离合器37根据需要释放。
[0077]
由此,当适合使行星式无级变速机构24无级变速时,能够使行星式无级变速机构24无级变速来进行动力传递。当适合使行星式无级变速机构24内部锁止时,能够使行星式无级变速机构24内部锁止来进行动力传递。当适合经由直结机构27进行动力传递时,能够经由直结机构27进行动力传递。
[0078]
适合使行星式无级变速机构24无级变速来进行动力传递的时刻为挖掘中以及搬运中且车速为0~7km/h的范围。该理由为如下的(a)~(c)所述。
[0079]
(a)车辆的开动时以及挖掘时的传递效率高。
[0080]
(b)能够使变速比为无限大。即,即使在发动机9旋转的情况下,也能够一边使输出轴23的旋转停止一边向输出轴23传递转矩。因此,适合挖掘作业。
[0081]
(c)能够控制发动机9所产生的动力中的通过变速装置21向输出轴23传递的转矩。即,能够在使装卸作业机7动作的液压泵10与变速装置21之间进行动力的分配。
[0082]
适合使行星式无级变速机构24内部锁止来进行动力传递的时刻为搬运中以及回送中且车速为7~9km/h的范围。该理由为如下的(d)~(e)所述。
[0083]
(d)若车速变高,则与使行星式无级变速机构24无级变速相比,使行星式无级变速机构24内部锁止来进行动力传递的情况的传递效率更高。
[0084]
(e)能够机械式地从无级变速向内部锁止切换。因此,当从无级变速向内部锁止的切换时,能够抑制发动机9的剧烈的旋转变动。由此,能够抑制液压泵10的排出流量的剧烈的变动,能够提高装卸作业机7的操作性。与此同时,能够缩小切换时的输出轴23的转矩的变动,能够提高轮式装载机1的舒适性。
[0085]
适合经由直结机构27进行动力传递的时刻为搬运中且车速为9~13km/h的范围。另外为,回送中且车速为9~40km/h的范围。该理由为如下所述。即,经由直结机构27进行动
力传递的外部锁止的动力的传递效率最高。即,外部锁止由于通过一对齿轮27a、27b彼此的啮合来传递动力,所以相较于经由行星齿轮机构29进行动力传递的内部锁止,传递效率高。此外,当车速为9km/h以下时,具有在回送的途中或搬运的途中突然开始挖掘的可能性。另一方面,在将动力传递路径从直结机构27(外部锁止)向行星式无级变速机构24切换的情况下,针对该切换可能会需要时间。因此,车速为9km/h以下时,希望不使用直结机构27。
[0086]
如下的表1表示具有内部锁止和外部锁止的双方的变速装置21的动力传递路径的组合。该情况下,多级变速机构26具有前进4挡和后退1挡的变速挡。因此,在经由直结机构27(外部锁止机构)进行动力传递的情况下,多级变速机构26能够选择前进1速、前进2速、前进3速、前进4速、后退1速的变速挡。
[0087]
[表1]
[0088][0089]
[0090]
此外,在多级变速机构26的速度挡为前进2速、前进3速、前进4速的任意一个的情况下,都可以不经由直结机构27而经由行星式无级变速机构24进行动力传递。此时的行星式无级变速机构24的动作可以为无级变速动作,也可以为内部锁止的状态。但是,若使行星式无级变速机构24进行无级变速动作,则与内部锁止以及外部锁止相比较,行星式无级变速机构24的传递效率变低。由此,由于变速装置21的传递效率降低,所以优选恰当选择上述表1所示的动力传递路径的组合。
[0091]
图12表示内部锁止和外部锁止的双方存在的变速装置21的驱动力线图。如图12所示,前进能够变速为前进1速无级变速lf1、前进1速内部锁止lf2、前进1速外部锁止lf3、前进2速外部锁止lf4、前进3速外部锁止lf5、前进4速外部锁止lf6的6个挡。由此,能够无限接近前进方向上的理想的驱动力线lf。
[0092]
另一方面,后退能够变速为后退1速无级变速lr1、后退1速内部锁止lr2、后退1速外部锁止lr3的3个挡。由此,能够无限接近后退方向上的理想的驱动力线lr。由此,能够在挖掘时获得高牵引力,能够在回送时获得高车速(0~40km/h),且能够在多种坡度的上坡道路上稳定上坡。
[0093]
此外,为了实现更大的变速比范围,优选构成为,具有“行星式无级变速机构24的内部锁止”和“基于直结机构27的外部锁止”的双方。但是,为了实现“有效使用行星式无级变速机构24的增速的变速范围,同时当从无级变速向锁止状态的动力传递的切换时抑制车辆的加减速度的变化”,也可以构成为,仅具有内部锁止和外部锁止中的任意一方。
[0094]
图13表示作为实现锁止的方式而仅具有行星式无级变速机构24的内部锁止的第1变形例的变速装置21a。该第1变形例的变速装置21a能够进行行星式无级变速机构24的内部锁止动作,但不具有外部锁止机构(直结机构27)。如下的表2表示仅具有内部锁止的变速装置21a的动力传递路径的组合。
[0095]
[表2]
[0096][0097]
第1变形例中,少了一个基于直结机构27(外部锁止)的变速挡。因此,为了获得与存在内部锁止和外部锁止的双方的变速装置21同等的变速比,第1变形例中,多级变速机构26a具有前进5挡和后退2挡的变速挡。另外,第1变形例中,具有用于如后述那样地实现内部锁止的阻挡机构40。此外,图14表示第2变形例的变速装置21b。第2变形例的变速装置21b也如第1变形例那样地省略了外部锁止机构。另外,第2变形例中,具有用于如后述那样地实现内部锁止的制动机构41。而且,图15表示第3变形例的变速装置21c。第3变形例的变速装置21c省略了外部锁止机构,且具有制动机构41,在此基础上,省略了惰性元件28。即,在省略了直结机构27(外部锁止)的构成的情况下,也能够省略惰性元件28。
[0098]
图16表示具有行星式无级变速机构24(内部锁止)但不具有直结机构27(外部锁止)的变速装置21a、21b、21c(图13、图14、图15)的驱动力线图。如图16所示,前进能够变速为前进1速无级变速lf1、前进1速内部锁止lf2、前进2速内部锁止lf3、前进3速内部锁止lf4、前进4速内部锁止lf5、前进5速内部锁止lf6的6个挡。另一方面,后退能够变速为后退1速无级变速lr1、后退1速内部锁止lr2、后退2速内部锁止lr3的3个挡。
[0099]
相对于此,例如通过在第1实施方式的变速装置21(图3、图4)中不进行内部锁止动作,而能够实现仅具有外部锁止的构成。如下的表3表示具有外部锁止(直结机构27)但不进行内部锁止动作的变速装置21的动力传递路径的组合。
[0100]
[表3]
[0101][0102][0103]
图17表示不进行内部锁止动作的变速装置21的驱动力线图。如图17所示,前进能够变速为前进1速无级变速lf1、前进1速外部锁止lf2、前进2速外部锁止lf3、前进3速外部锁止lf4、前进4速外部锁止lf5的5个挡。另一方面,后退能够变速为后退1速无级变速lr1、后退1速外部锁止lr2的2个挡。
[0104]
接着,参照图3来说明行星式无级变速机构24。行星式无级变速机构24具有行星齿轮机构29、第1变速器33、第2变速器34、传递元件35、第2离合器36和第3离合器37。行星齿轮机构29经由第1连结部件30与第1输出侧(第1变速器33侧)连接。行星齿轮机构29经由第2连结部件31与输入侧(发动机9侧)连接。行星齿轮机构29经由第3连结部件32与第2输出侧(惰性元件28侧)连接。
[0105]
第1变速器33以及第2变速器34由电动马达/发电机(电动马达、电动发电机)或液压泵/马达(液压泵、液压马达)等构成。第1变速器33以及第2变速器34构成为,在第1变速器33的旋转速度与第2变速器34的旋转速度不同的情况下,能够进行无级变速,同时在两者间进行动力传递。为此,在第1变速器33与第2变速器34之间设有用于在两者间传递动力的传递元件35。传递元件35例如由电气配线或液压配管构成。在传递元件35的中途也可以安装有动力储存源38。动力储存源38例如能够由液压蓄能器或蓄电池构成。另外,第1变速器33、
第2变速器34和传递元件35的功能可以由变速比无限大变速机(ivt)构成。
[0106]
在行星齿轮机构29与第1变速器33之间,即,在第1连结部件30与第1变速器33之间设有第2离合器36。第2离合器36例如由基于摩擦接合的离合器(摩擦盘)、犬牙式离合器或带同步器的犬牙式离合器构成。第2离合器36在第1连结部件30与第1变速器33之间进行两者的机械性的结合(连接)和释放。即,第2离合器36在行星齿轮机构29与第1变速器33之间切换这些行星齿轮机构29与第1变速器33之间的动力的传递和释放。
[0107]
控制器25的构成例如包括运算回路(cpu)、具有存储器等的微计算机。控制器25控制第1离合器27c的联结与释放、第2离合器36的联结与释放、和第3离合器37的联结与释放。控制器25控制第1变速器33的旋转速度。控制器25根据需要控制第2变速器34的旋转速度。控制器25根据需要控制传递元件35、动力储存源38。控制器25根据需要控制后述的阻挡机构40(图13)、制动机构41(图14、图15)。而且,控制器25控制后述的多级变速机构26的离合器58、59、60、66、67、68、69的联结与释放。
[0108]
在此,控制器25控制第2离合器36的联结与释放。例如,在不需要基于行星式无级变速机构24的动力传递时,控制器25输出将第2离合器36释放的信号,将第2离合器36释放。由此,能够使第1变速器33的旋转停止(或降低),能够减少基于第1变速器33的旋转造成的动力损失。
[0109]
第2变速器34经由第3离合器37与惰性元件28连接。第3离合器37在第2变速器34与惰性元件28之间切换这些第2变速器34与惰性元件28之间的动力的传递和释放。即,第3离合器37设于第2变速器34与惰性元件28之间。惰性元件28具有惰轴28a、和设于惰轴28a的惰轮28b。惰轴28a经由第1离合器27c与直结机构27的锁止齿轮27b(更具体地,锁止齿轮27b的旋转轴27b1)连接。
[0110]
另外,惰轴28a经由变速机39以及第3离合器37与第2变速器34连接。惰轮28b与第3连结部件32啮合,经由第3连结部件32与行星齿轮机构29连接。在第2变速器34与惰性元件28之间设有在第2变速器34与惰性元件28之间进行变速的变速机39。该变速机39也可以省略。该情况下,在惰性元件28的惰轴28a与第2变速器34的旋转轴之间设置第3离合器37,通过第3离合器37能够进行惰轴28a与第2变速器34的旋转轴的连接(联结)和释放。
[0111]
第3离合器37例如由基于摩擦接合的离合器(摩擦盘)、犬牙式离合器或带同步器的犬牙式离合器构成。第3离合器37在第2变速器34与惰性元件28之间进行两者的机械性的结合(连接)和释放。控制器25控制第3离合器37的联结和释放。例如,在不需要基于第2变速器34的动力传递时,控制器25输出将第3离合器37释放的信号,将第3离合器37释放。由此,能够使第2变速器34的旋转停止(或降低),能够降低基于第2变速器34的旋转造成的动力损失。然而在这些条件下,也可以不必须将第3离合器37释放。
[0112]
此外,在不需要基于第2变速器34的动力传递时、以及在不需要基于行星式无级变速机构24的动力传递时,例如为如下的(f)~(i)所述。然而,在这些(f)~(i)的条件下,也可以不必须将第2离合器36或第3离合器37释放。
[0113]
(f)从输入轴22输入的动力经由直结机构27向惰性元件28传递时。
[0114]
(g)第1连结部件30的旋转由第1变速器33以外的其他方式(例如制动机构41)被固定,由此行星式无级变速机构24成为内部锁止状态时。
[0115]
(h)车辆停止时。
[0116]
(i)车辆滑行(惯性行驶)时。
[0117]
从发动机9向第2连结部件31传递的动力通过行星齿轮机构29分配至与第1变速器33相连的第1连结部件30和与惰性元件28相连的第3连结部件32。分配至第1连结部件30的动力通过第2离合器36、第1变速器33、传递元件35、第2变速器34、第3离合器37、变速机39向惰性元件28传递。分配至第3连结部件32的动力向惰性元件28传递。第1连结部件30与第3连结部件32的转矩的分配比例始终固定,依赖于行星齿轮机构29的形式和齿轮的啮合半径。
[0118]
然而,第1连结部件30与第3连结部件32的转矩的分配比例为固定。因此,并非始终从第1变速器33向第2变速器34转递动力,有时从第2变速器34向第1变速器33进行动力传递。从第3连结部件32向惰性元件28传递的动力与从第1连结部件30经由第1变速器33以及第2变速器34的动力相比,损失小。因此,使变速器33、34与行星齿轮机构29组合而成的行星式无级变速机构24与仅通过变速器进行动力传递的无级变速装置相比,动力传递效率高。
[0119]
接着,说明行星齿轮机构29。图3中,由四边形(方框)表示行星齿轮机构29。在此,行星齿轮机构29具有与作为动力源的发动机9相连的第1部件、与第1变速器33相连的第2部件、和与成为输出轴23侧的惰性元件28相连的第3部件的三个部件(旋转部件)。在此,第1实施方式中,行星齿轮机构29由行星齿轮架和两个太阳齿轮(第1太阳齿轮、第2太阳齿轮)构成。如下的表4表示行星齿轮机构29的构成元件(行星齿轮架、第1太阳齿轮、第2太阳齿轮)的组合。从提高行星式无级变速机构24的传递效率且小型轻量地构成行星齿轮机构29的方面考虑,表4中的“no1-a”为最合适。
[0120]
[表4]
[0121][0122]
如图4至图6所示,第1实施方式(即,表4的no1-a)中,行星齿轮机构29具有与第1部件对应的行星齿轮架29a、与第2部件对应的第1太阳齿轮29b、与第3部件对应的第2太阳齿轮29c、行星齿轮29d、和平衡齿轮29e。此外,第1太阳齿轮29b、第2太阳齿轮29c、行星齿轮29d以及平衡齿轮29e不仅可以为基于齿轮(齿轮)的啮合的动力传递,也可以为例如基于罗拉辊(外周面)的摩擦的动力传递。
[0123]
发动机9经由第2连结部件31与行星齿轮架29a结合。第1太阳齿轮29b经由第1连结部件30与第1变速器33连接。第2太阳齿轮29c经由第3连结部件32与惰性元件28(惰轮28b)连接。第1太阳齿轮29b与行星齿轮29d啮合。第2太阳齿轮29c与平衡齿轮29e啮合。平衡齿轮29e与行星齿轮29d啮合。
[0124]
行星齿轮29d的自转轴sp(图6)以及平衡齿轮29e的自转轴sb(图6)支承于行星齿轮架29a。因此,行星齿轮29d以及平衡齿轮29e一边以行星齿轮机构29的中心轴s(图6)为中心公转一边自转。行星齿轮29d具有与第1太阳齿轮29b啮合的齿轮部29d1、和与平衡齿轮
29e啮合的齿轮部29d2。行星齿轮机构29成立的制约条件在于,第1太阳齿轮29b的中心轴s与行星齿轮29d的自转轴sp之间的距离跟第2太阳齿轮29c的中心轴s与行星齿轮29d的自转轴sp之间的距离一致。因此,需要对第1太阳齿轮29b、行星齿轮29d、与第1太阳齿轮29b啮合的齿轮部29d1、第2太阳齿轮29c、平衡齿轮29e、及与平衡齿轮29e啮合的齿轮部29d2的各自的齿数、齿轮的模数、齿轮的转位、平衡齿轮29e的自转中心位置进行调整,使上述距离一致。即,只要能够使上述距离一致即可,例如能够缩小第1太阳齿轮29b和第2太阳齿轮29c的齿数之差或设成相同齿数。因此,能够自由设定行星齿轮机构29的减速比。
[0125]
此外,根据第1实施方式,平衡齿轮29e设在第2太阳齿轮29c与行星齿轮29d之间,但也可以设在第1太阳齿轮29b与行星齿轮29d之间。然而,在“第2太阳齿轮29c与行星齿轮29d之间”和“第1太阳齿轮29b与行星齿轮29d之间”的双方都设置平衡齿轮29e的情况,或在双方都不设置平衡齿轮29e的情况下,也能够进行动力传递。然而,优选为,在任意一方设置平衡齿轮。
[0126]
接着,说明由行星齿轮架29a和两个太阳齿轮29b、29c构成的行星齿轮机构29的动作。以下,在表4的“no1-a”、“no1-b”、“no1-c”的全部条件下成立。
[0127]
首先,说明行星齿轮机构29的三个部件(行星齿轮架29a和两个太阳齿轮29b、29c)的转矩的分配。图6是从动力源侧观察行星齿轮机构29的剖视图。行星齿轮架29a、第1太阳齿轮29b以及第2太阳齿轮29c同心配置。即,行星齿轮架29a、第1太阳齿轮29b以及第2太阳齿轮29c的中心轴s(旋转中心轴)一致。第1太阳齿轮29b与行星齿轮29d的齿轮部29d1啮合。第2太阳齿轮29c与平衡齿轮29e啮合。平衡齿轮29e与行星齿轮29d的齿轮部29d2啮合。平衡齿轮29e和行星齿轮29d以使各自的齿轮的啮合成立的方式,通过行星齿轮架29a在自转方向上自由旋转,且相对于中心轴s拘束于公转方向。因此,行星齿轮29d以作为行星齿轮29d的中心轴的自转轴sp为中心自转,且以行星齿轮架29a的中心轴s为中心公转。因此,行星齿轮29d的中心轴(自转轴sp)的轨迹cp成为以行星齿轮架29a的中心轴s为中心的圆。平衡齿轮29e以作为平衡齿轮29e的中心轴的自转轴sb为中心自转,且以行星齿轮架29a的中心轴s为中心公转。因此,平衡齿轮29e的中心轴(自转轴sb)的轨迹cb成为以行星齿轮架29a的中心轴s为中心的圆。
[0128]
第1太阳齿轮29b的啮合半径rs1为当第1太阳齿轮29b与行星齿轮29d啮合时的第1太阳齿轮29b侧的啮合半径。行星齿轮29d的齿轮部29d1的啮合半径rp1为当第1太阳齿轮29b与行星齿轮29d啮合时的齿轮部29d1侧的啮合半径。第2太阳齿轮29c的啮合半径rs2为当第2太阳齿轮29c与平衡齿轮29e啮合时的第2太阳齿轮29c侧的啮合半径。行星齿轮29d的齿轮部29d2的啮合半径rp2为当平衡齿轮29e与行星齿轮29d啮合时的行星齿轮29d侧的啮合半径。
[0129]
第1实施方式(表4的no1-a)中,行星齿轮架29a与跟发动机9相连的部件、即第2连结部件31连接,由此,行星齿轮架29a的转矩tc是发动机9能够产生的转矩。第1太阳齿轮29b与跟第1变速器33相连的部件、即第1连结部件30连接,由此第1太阳齿轮29b的转矩ts1是第1变速器33能够产生的转矩。第2太阳齿轮29c与跟惰性元件28相连的部件、即第3连结部件32连接,由此第2太阳齿轮29c的转矩ts2是从惰轮28b受到的转矩反力。
[0130]
图18所示的第4变形例(即,表4的no1-b)的变速装置21d中,第1太阳齿轮29b跟与发动机9相连的部件、即第2连结部件31连接,由此,第1太阳齿轮29b的转矩ts1是发动机9能
够产生的转矩。行星齿轮架29a与跟第1变速器33相连的部件、即第1连结部件30连接,由此行星齿轮架29a的转矩tc是第1变速器33能够产生的转矩。第2太阳齿轮29c与跟惰性元件28相连的部件、即第3连结部件32连接,由此第2太阳齿轮29c的转矩ts2是从惰轮28b受到的转矩反力。
[0131]
图19所示的第5变形例(即,表4的no1-c)的变速装置21e中,第1太阳齿轮29b与跟发动机9相连的部件、即第2连结部件31连接,由此第1太阳齿轮29b的转矩ts1是发动机9能够产生的转矩。第2太阳齿轮29c与跟第1变速器33相连的部件、即第1连结部件30连接,由此第2太阳齿轮29c的转矩ts2是第1变速器33能够产生的转矩。行星齿轮架29a与跟惰性元件28相连的部件、即第3连结部件32连接,由此行星齿轮架29a的转矩tc是从惰轮28b受到的转矩反力。
[0132]
接着,说明第1太阳齿轮29b的转矩ts1、第2太阳齿轮29c的转矩ts2以及行星齿轮架29a的转矩tc的关系性。首先,第1太阳齿轮29b和第2太阳齿轮29c经由行星齿轮29d和平衡齿轮29e而啮合。另外,平衡齿轮29e和行星齿轮29d通过行星齿轮架29a在自转方向上自由旋转,且相对于行星齿轮架29a的中心轴s拘束于公转方向。若根据这些,求出作用反作用的关系,则如下的数式2式、数式3、数式4成立。
[0133]
[数式2]
[0134][0135]
[数式3]
[0136][0137]
[数式4]
[0138]
tc=ts1+ts2
[0139]
根据这些数式,第1太阳齿轮29b的转矩ts1、第2太阳齿轮29c的转矩ts2以及行星齿轮架29a的转矩tc能够根据齿轮部29d2的啮合半径rp2、第2太阳齿轮29c的啮合半径rs2、齿轮部29d1的啮合半径rp1以及第1太阳齿轮29b的啮合半径rs1计算。齿轮部29d2的啮合半径rp2、第2太阳齿轮29c的啮合半径rs2、齿轮部29d1的啮合半径rp1、第1太阳齿轮29b的啮合半径rs1由各自的齿轮的啮合半径决定,由此在行星式无级变速机构24进行动力传递的过程中无法变更。因此,第1太阳齿轮29b的转矩ts1、第2太阳齿轮29c的转矩ts2以及行星齿轮架29a的转矩tc的比例在行星式无级变速机构24进行动力传递的期间内是不变的。
[0140]
控制器25基于该法则,输出对第1变速器33进行控制的信号,来控制与第1变速器33相连的第1连结部件30(例如第1太阳齿轮29b)的转矩。即,控制器25通过控制第1变速器33来控制第1连结部件30(例如第1太阳齿轮29b)的转矩。由此,控制器25间接地控制与发动机9相连的第2连结部件31(例如行星齿轮架29a)的转矩和与惰性元件28相连的第3连结部件32(例如第2太阳齿轮29c)的转矩。该结果为,能够在跟发动机9相连的第2连结部件31(例如行星齿轮架29a)与跟惰性元件28相连的第3连结部件32(例如第2太阳齿轮29c)之间控制传递转矩。
[0141]
接着,说明第1太阳齿轮29b的自转速度、第2太阳齿轮29c的自转速度以及行星齿轮架29a的自转速度的关系性。首先,第1太阳齿轮29b和第2太阳齿轮29c经由行星齿轮29d
和平衡齿轮29e而啮合。另外,平衡齿轮29e和行星齿轮29d通过行星齿轮架29a在自转方向上自由旋转,且相对于行星齿轮架29a的中心轴s在公转方向上被拘束。若根据这些求出旋转速度的关系,则如下的数式5成立。此外,数5式中的“ka”与数式6相同。此外,将行星齿轮架29a的自转速度设为“vc”,将第1太阳齿轮29b的自转速度设为“vs1”,将第2太阳齿轮29c的自转速度设为“vs2”。
[0142]
[数式5]
[0143]
vs2/vc=-ka{vs1/vc}+(ka-1)
[0144]
[数式6]
[0145]
ka={rs1
×
rp2}/{rs2
×
rp1}
[0146]
图7表示行星齿轮机构29的旋转速度的关系。图7中的速度关系线y1用线图来表示数式5。假设行星齿轮架29a的自转速度固定。该情况下,若第2太阳齿轮29c的自转速度变高,则第1太阳齿轮29b的自转速度变低。相反地,若第2太阳齿轮29c的自转速度变低,则第1太阳齿轮29b的自转速度变高。控制器25根据该法则,输出对第1变速器33进行控制的信号,控制与第1变速器33相连的第1连结部件30(例如第1太阳齿轮29b)的旋转速度。即,控制器25通过控制第1变速器33来控制第1连结部件30(例如第1太阳齿轮29b)的旋转速度。由此,控制器25间接地控制与发动机9相连的第2连结部件31(例如行星齿轮架29a)的旋转速度和与惰性元件28相连的第3连结部件32(例如第2太阳齿轮29c)的旋转速度。该结果为,能够在跟发动机9相连的第2连结部件31(例如行星齿轮架29a)与跟惰性元件28相连的第3连结部件32(例如第2太阳齿轮29c)之间控制变速比。
[0147]
如上述那样,行星齿轮机构29需要使第1太阳齿轮29b的中心轴s与行星齿轮29d的自转轴sp之间的距离跟第2太阳齿轮29c的中心轴s与行星齿轮29d的自转轴sp之间的距离一致。即,只要使这些距离一致即可,例如,能够自由设定第1太阳齿轮29b的啮合半径rs1、齿轮部29d1的啮合半径rp1、第2太阳齿轮29c的啮合半径rs2和齿轮部29d2的啮合半径rp2。因此,根据转矩tc、ts1、ts2的关系式(数式2、数式3、数式4)以及自转速度vs1、vs2、vc的关系式(数式5、数式6),行星齿轮机构29与第1变速器33能够吸收的转矩和可允许的最高旋转速度相应地,调整第1太阳齿轮29b的啮合半径rs1、齿轮部29d1的啮合半径rp1、第2太阳齿轮29c的啮合半径rs2、和齿轮部29d2的啮合半径rp2。由此,将数式6的ka值设定为理想值,将图7所示的速度关系线y1的倾斜设为理想值,由此,能够使行星齿轮机构29的转矩和旋转速度与第1变速器33能够吸收的转矩和可允许的最高旋转速度的双方相匹配。该结果为,能够使用小型且廉价的第1变速器33,且能够提高行星式无级变速机构24的传递效率。
[0148]
此外,第1变速器33的大小以及价格与第1变速器33能够吸收的转矩的大小成比例。因此,希望第1变速器33的吸收转矩小。在第1实施方式(即,表4的no1-a)中举出具体例来说明。首先,希望缩小数式6的ka值。而且,探讨行星齿轮机构29与惰性元件28之间的动力的传递效率。该情况下,经由第1连结部件30、第1变速器33、传递元件35、第2变速器34、变速机39以及第3离合器37的动力传递路径的传递效率为70~80%左右。另一方面,经由第3连结部件32的动力传递路径的传递效率为99%左右。因此,向第1变速器33分配的转矩小的情况,能够提高行星式无级变速机构24的传递效率。因此,缩小数式6的ka值,对于行星式无级变速机构24来说是有利的。
[0149]
另一方面,若从图7所示的速度关系线y1中缩小ka值,则“第2太阳齿轮的旋转速
度/行星齿轮架旋转速度(纵轴)”小时的“第1太阳齿轮的旋转速度/行星齿轮架的旋转速度(横轴)”变大。第2太阳齿轮29c经由惰性元件28、多级变速机构26与输出轴23相连,因此,当“第2太阳齿轮的旋转速度/行星齿轮架旋转速度”小时,处于动力源(发动机9)旋转且车速为低速的状态。即,若在行星齿轮架29a的旋转速度(动力源的旋转速度)固定的基础上缩小ka,则车辆为低速时的第1变速器33的旋转速度上升。作为一例,若举出具体例,则当“第2太阳齿轮的旋转速度/行星齿轮架旋转速度”为0时,第2太阳齿轮29c为0旋转。第2太阳齿轮29c经由惰性元件28、多级变速机构26与输出轴23相连,由此在第2太阳齿轮29c为0min-1
的情况下,车速为0km/h。即,行星式无级变速机构24的变速比为无限大。若第1太阳齿轮29b的旋转速度的限制为6000min-1
左右,将动力源(发动机9)设为柴油发动机,则行星齿轮架29a的旋转速度的限制为2000min-1
左右,由此“第1太阳齿轮的旋转速度/行星齿轮架的旋转速度”成为3.0。若向数式5中代入“第2太阳齿轮的旋转速度/行星齿轮架旋转速度=0”、“第1太阳齿轮的旋转速度/行星齿轮架的旋转速度=3”,则ka=0.5。即,ka=0.5前后成为下限值。如以上那样,希望ka值在不超出第1变速器33的可允许的最高旋转速度的范围内缩小。并且,由行星齿轮架和两个太阳齿轮构成的行星齿轮机构29能够自由设定第1太阳齿轮29b的啮合半径rs1、齿轮部29d1的啮合半径rp1、第2太阳齿轮29c的啮合半径rs2、和齿轮部29d2的啮合半径rp2,由此能够自由决定ka值。因此,能够驾驶直到第1变速器33的可允许的最高旋转速度。由此,能够使用小型且廉价的第1变速器33,且能够将行星式无级变速机构24的传递效率提高至80~93%。
[0150]
相对于此,说明图19所示的第5变形例(即,表4的no1-c)。第5变形例中,第1变速器33与第2太阳齿轮29c连接,由此,向第1变速器33侧分配的转矩为ts2。根据数式3,rs2以及rp1越小则ts2越小,rs1以及rp2越大则ts2越小。如上述那样,向第1变速器33侧分配的转矩从传递效率和变速器的价格的方面考虑越小越好,因此只要缩小rs2以及rp1,并增大rs1以及rp2即可。该情况下,ka比数式6变大。即,可以说ka越大,第1变速器33所需要的转矩越小。将数式5变形,导出如下的数式7。图8表示数式7的线图。
[0151]
[数式7]
[0152]
vc/vs1-(1/(ka+1))(vs2/vs1)+(ka/(ka+1))
[0153]
若作为一例而举出具体例,则行星齿轮架29a经由惰性元件28、多级变速机构26与输出轴23相连,因此在vc为0min-1
的情况下,车速为0km/h。该情况下,“vc/vs1”为0。在此,在成为动力源的发动机9为柴油发动机的情况下,发动机9的最高旋转速度为2000min-1
左右,由此vs1为2000min-1。另外,与第1变速器33相连的第1连结部件30的允许旋转速度(vs2)为-6000min-1
至6000min-1
左右。由此,“vs2/vs1”能够取-3~3的范围。若向数式7中代入“vc/vs1=0”、“vs2/vs1=-3”来求出ka,则ka=3。即,该情况下的ka的上限值为3前后。因此希望ka值在不超出第1变速器33的可允许的最高旋转速度的范围内变大。并且,如上述那样,能够自由决定ka值,由此能够驾驶至第1变速器33的可允许的最高旋转速度。由此,能够使用小型且廉价的第1变速器33,且能够将行星式无级变速机构24的传递效率提高至80~93%。
[0154]
相对于此,说明图18所示的第4变形例(即,表4的no1-b)。第4变形例中,第1变速器33与行星齿轮架29a连接,由此,向第1变速器33侧分配的转矩为tc。通过数4式,在ts1(来自为动力源的发动机9的转矩)为固定值的基础上,为了缩小tc,只要缩小ts2即可。根据数式
3,rs2以及rp1越小则ts2越小,rs1以及rp2越大则ts2越小。如上述那样,向第1变速器33侧分配的转矩从传递效率和变速器的价格的方面考虑优选为变小,因此只要缩小rs2以及rp1,增大rs1以及rp2即可。该情况下,ka根据数式6而变大。即,可以说ka越大,第1变速器33所需要的转矩越小。将数式5变形,导出如下的数式8。图9表示数式8的线图。
[0155]
[数式8]
[0156]
vs2/vs1=(ka+1)(vc/vs1)-ka
[0157]
若作为一例而举出具体例,则第2太阳齿轮29c经由惰性元件28、多级变速机构26与输出轴23相连,因此在vs2以高旋转进行旋转的情况下车速以更高的车速行驶。行星式无级变速机构24的变速的范围越大越好,因此希望“vs2/vs1”的最大值较大。但是,与惰性元件28相连的第3连结部件32的允许旋转速度(vs2)为8000min-1
左右。另外,在成为动力源的发动机9为柴油发动机的情况下,发动机9的最高旋转速度为2000min-1
左右,由此vs1为2000min-1
。因此,“vs2/vs1”的上限值为4.0左右。而且,与第1变速器33相连的第1连结部件30的允许旋转速度(vs2)为-6000min-1
至6000min-1
左右。由此,“vc/vs1”能够取-3~3的范围。若向数式8中代入“vs/vs1=4.0”,“vs2/vs1=3”,求出ka,则ka=0.5。即,ka在0.5左右成为上限值。并且,如上述那样地能够自由决定ka值,由此能够驾驶至与第1变速器33相连的第1连结部件30的可允许的最高旋转速度。由此,第1变速器33的传递转矩变小,能够使用小型且廉价的第1变速器33。
[0158]
接着,说明行星式无级变速机构24的内部锁止动作。行星式无级变速机构24的动力传递效率为80~93%,作为无级变速机,传递效率较高。相对于此,例如,基于一对齿轮彼此的啮合实现的齿轮变速机的动力传递效率为99%左右。因此,行星式无级变速机构24与基于一对齿轮彼此的啮合的变速机相比,动力传递效率低。参照图3来说明该理由。
[0159]
即,考虑行星齿轮机构29与惰性元件28(惰轮28b)之间的动力的传递效率。在此,经由第1连结部件30、第1变速器33、传递元件35、第2变速器34、变速机39以及第3离合器37的动力传递路径的传递效率为70~80%左右。相对于此,经由第3连结部件32的动力传递路径的传递效率为99%左右。因此,为了提高传递效率,只要使与第1变速器33相连的第1连结部件30的旋转停止,在第1变速器33与第2变速器34之间不进行动力传递即可。由此,从发动机9通过第2连结部件31向行星齿轮机构29供给的动力不会向与第1变速器33相连的第1连结部件30分配,而全部向与惰性元件28(惰轮28b)相连的第3连结部件32传递。
[0160]
第3连结部件32和惰轮28b通过齿轮彼此的啮合来传递动力,由此,从发动机9通过第2连结部件31向行星齿轮机构29供给的动力能够以高效率向惰轮28b传递。由此,行星式无级变速机构24的动力传递效率提高至97%左右,能够提高变速装置21的传递效率。该结果为,能够使轮式装载机1节省油耗。
[0161]
在行星式无级变速机构24进行内部锁止动作的情况下,行星式无级变速机构24成为固定变速比。在此若将内部锁止变速比设为in,则内部锁止变速比in能够由如下的数式9表达。此外,将第3连结部件32的旋转速度设为“v32”,将第2连结部件31的旋转速度设为“v31”,将第1连结部件30的旋转速度设为“v30”。
[0162]
[数式9]
[0163]
[0164]
当内部锁止动作时,上述的数式5也成立。因此,通过向数式5中作为0而代入与第1变速器33相连的第1连结部件30的旋转速度,则能够计算内部锁止变速比in。例如,第1实施方式(表4的no1-a)中,向数式5中作为0而代入与第1连结部件30连接的第1太阳齿轮29b的自转速度vs1。即,内部锁止变速比in为如下的数式10。
[0165]
[数式10]
[0166]
vs2/vc=ka+1
[0167]
由此
[0168]
in=ka+1
[0169]
图18所示的第4变形例(表4的no1-b)中,向数式8中作为0而代入与第1连结部件30连接的行星齿轮架29a的自转速度vc。即,内部锁止变速比in为如下的数式11。
[0170]
[数式11]
[0171]
vs2/vs1=-ka
[0172]
由此
[0173]
in=-ka
[0174]
图19所示的第5变形例(表4的no1-c)中,向数式7中作为0而代入与第1连结部件30连接的第2太阳齿轮29c的自转速度vs2。即,内部锁止变速比in成为如下的数式12。
[0175]
[数式12]
[0176]
vc/vs1=ka/(ka+1)
[0177]
由此
[0178]
in=ka/(ka+1)
[0179]
这样地,内部锁止变速比in依赖于行星齿轮机构29的齿轮的组合、和ka。为了将行星式无级变速机构24设为内部锁止的状态,则只要使与行星齿轮机构29相连的三个连结部件30、31、32中的与第1变速器33相连的第1连结部件30的旋转停止即可。在第1变速器33以及第2变速器34为液压泵/马达的情况下,控制器25将第1变速器33的液压泵/马达的容积保持在规定以上(优选为最大容积的10%以上),将第2变速器34的液压泵/马达的容积控制为0。
[0180]
另外,为了使第1连结部件30的旋转停止,例如,如图13所示的第1变形例那样,也可以采用在第1变速器33与第2变速器34之间进行动力传递的传递元件35中设置阻挡机构40的构成。阻挡机构40通过由控制器25来控制,将第1变速器33与第2变速器34之间的动力传递截断。
[0181]
例如,在传递元件35的动力传递是通过液压进行的情况下,阻挡机构40能够由液压阀构成。控制器25向阻挡机构40发送信号,将液压油在第1变速器33与第2变速器34之间的流动截断。另外,在第1变速器33与第2变速器34之间的动力传递是通过电力进行的情况下,阻挡机构40能够由转换器/逆变器构成。该情况下,转换器/逆变器向电力线间付与模拟的电阻,使电力线间的电压上升。另外,作为阻挡机构40,也可以采用由磁性接触器将电力的流动截断的构成,通过抵抗器向电力线间付与电阻的构成。在任何情况下,控制器25向阻挡机构40发送动力的传递和截断的信号,控制阻挡机构40。
[0182]
另外,内部锁止状态也可以通过将第1变速器33的旋转轴与非旋转部固定并将第1变速器33的旋转停止而实现。例如,也可以如图14所示的第2变形例以及图15所示的第3变
形例那样,将第1连结部件30通过制动机构41固定于非旋转部(例如变速装置21的外壳),由此实现内部锁止状态。制动机构41能够采用通过摩擦结合或机械啮合结合而将与第1变速器33相连的第1连结部件30固定于非旋转部的构成。尤其,在第1变速器33为发电机的情况下,即使在内部锁止的动作时也需要向第1变速器33(发电机)流动电流。因此,从动力损失的观点,希望将第1连结部件30由制动机构41固定于非旋转部。即,在第1变速器33为发电机的情况下,从动力损失的观点,希望将第1连结部件30由制动机构41固定于非旋转部。由此,能够提高内部锁止时的行星式无级变速机构24的动力传递,能够使轮式装载机1节省油耗。
[0183]
此外,图13至图15所示的第1至第3变形例的变速装置21a、21b、21c虽然能够进行行星式无级变速机构24的内部锁止动作,但不具有外部锁止机构(直结机构27)。在这样的变速装置21a、21b、21c的情况下,当开动时以及挖掘时,使行星式无级变速机构24无级变速来进行动力传递,当搬运时以及回送时,使行星式无级变速机构24内部锁止来进行动力传递。由此,在需要无级变速的开动时以及挖掘时(车速0~7km/h),能够通过基于行星式无级变速机构24实现的无级变动来提高动力传递效率。另一方面,在不需要无级变速的搬运时以及回送时(车速7km/h以上),能够使行星式无级变速机构24进行内部锁止动作,与无级变速相比进一步提高传递效率。由此,能够使轮式装载机1节省油耗。
[0184]
接着,参照图3来说明作为外部锁止机构的直结机构27。直结机构27将从发动机9供给来的动力不经由行星式无级变速机构24而通过齿轮彼此的啮合向惰轮28b传递。直结机构27的动力传递效率为99%左右,由此能够提高变速装置21的传递效率,使轮式装载机1节省油耗。直结机构27具有设于输入轴22的输入齿轮27a、与输入齿轮27a啮合的锁止齿轮27b、和第1离合器27c。设有锁止齿轮27b的旋转轴27b1经由第1离合器27c与惰性元件28的惰轴28a连接。第1离合器27c例如由基于摩擦接合的离合器(摩擦盘)、犬牙式离合器或带同步器的犬牙式离合器构成。第1离合器27c进行锁止齿轮27b与惰轮28b之间的机械式结合(连接)和释放。通过将第2离合器36释放,将第1离合器27c结合,而将从输入轴22输入的动力经由输入齿轮27a、锁止齿轮27b、第1离合器27c向惰轮28b传递。由此,从发动机9供给来的动力能够不经由行星式无级变速机构24,而经由作为外部锁止机构的直结机构27向惰轮28b传递。
[0185]
行星式无级变速机构24通过图7所示的速度关系线y1的行星齿轮机构29的特性,能够相对于与动力源(发动机9)相连的第2连结部件31而使与惰轮28b相连的第3连结部件32增速。为了有效使用行星式无级变速机构24的增速的范围,经由直结机构27的动力传递能够增速,而为优选。在此,当与行星齿轮机构29相连的三个连结部件30、31、32中的与第1变速器33相连的第1连结部件30和与惰轮28b相连的第3连结部件32的旋转速度相同时,与发动机9相连的第2连结部件31和与惰轮28b相连的第3连结部件32的旋转速度成为相同。
[0186]
此时的惰轮28b的旋转速度成为如下的数式13。此外,将惰轮28b的旋转速度设为“v28b”,将与发动机9相连的第2连结部件31的旋转速度设为“v31”,将与惰轮28b相连的第3连结部件32的齿数设为“n32”,将惰轮28b的齿数设为“n28b”。
[0187]
[数式13]
[0188]
v28b=v31
×
(n32/n28b)
[0189]
在此,以如下数式14那样地定义同步旋转速度比id。此外,将第3连结部件32的齿数设为“n32”,将惰轮28b的齿数设为“n28b”。
[0190]
[数式14]
[0191]
id=n32/n28b
[0192]
另外,以如下数式15那样地定义外部锁止旋转速度比ir。此外,将输入齿轮27a的齿数设为“n27a”,将锁止齿轮27b的齿数设为“n27b”。
[0193]
[数式15]
[0194]
ir=n27a/n27b
[0195]
该情况下,通过使外部锁止旋转速度比ir变得大于同步旋转速度比id,能够有效使用行星式无级变速机构24的增速范围。例如,在具有外部锁止但不进行内部锁止动作的变速装置21的情况下,如下所述地进行动力传递。即,在需要无级变速的开动时以及挖掘时(车速0~7km/h),经由行星式无级变速机构24进行动力传递。在不需要无级变速的搬运时以及回送时(车速7km/h以上),经由外部锁止机构(直结机构27)进行动力传递。
[0196]
另一方面,在具有外部锁止机构(直结机构27)且进行内部锁止动作的变速装置21的情况下,希望将外部锁止旋转速度比ir设为内部锁止变速比in以上。该情况下,例如,如下那样地进行动力传递。在需要无级变速的开动时以及挖掘时(车速0~7km/h),一边经由行星式无级变速机构24进行无级变速一边进行动力传递。在不需要无级变速的搬运时以及回送时(车速7km/h以上),一边经由行星式无级变速机构24使内部锁止动作一边进行动力传递。在不需要无级变速的搬运时以及回送时(车速10km/h以上),经由外部锁止机构(直结机构27)进行动力传递。由此,变速装置21能够在挖掘、开动、搬运、回送的所有动作时,选择动力传递效率最高的动力传递路径。该结果为,能够使轮式装载机1节省油耗。
[0197]
接着,说明多级变速机构26。多级变速机构26是通过齿轮的啮合,离合器的切换,以及制动的切换来变速的变速机构。多级变速机构26例如相当于行星变速机、对轴型变速机、手动变速箱、自动变速箱、双离合变速箱等。第1实施方式中,多级变速机构26由前进4挡变速、后退1挡变速的双离合变速箱构成。相对于此,图13所示的第1变形例、图14所示的第2变形例、图15所示的第3变形例中,多级变速机构26a由前进5挡变速、后退2挡变速的双离合变速箱构成。此外,多级变速机构26、26a不限定于这些构成,例如前进能够设想从1挡变速至16挡变速,后退能够设想从1挡变速至8挡变速。
[0198]
参照图10来说明作为双离合变速箱的多级变速机构26。多级变速机构26具有奇数轴51、偶数轴52、输出轴53和反转齿轮54。多级变速机构26的输出轴53也与变速装置21的输出轴23对应。奇数轴51的构成包括奇数挡齿轮55、前进1速齿轮56、前进3速齿轮57、作为第1输出离合器的第4离合器58、第6离合器59、第8离合器60、和奇数挡轴61。偶数轴52的构成包括偶数挡齿轮62、前进2速齿轮63、前进4速齿轮64、后退1速齿轮65、作为第2输出离合器的第5离合器66、第7离合器67、第10离合器68、第9离合器69、和偶数挡轴70。
[0199]
反转齿轮54是用于使输出轴53的旋转方向倒转的齿轮。输出轴53的构成包括前进1速输出齿轮71、前进2速输出齿轮72、前进3速输出齿轮73、前进4速输出齿轮74和后退1速输出齿轮75。偶数挡齿轮62以及奇数挡齿轮55与惰轮28b始终啮合,与惰轮28b一同旋转。另外,前进1速齿轮56与前进1速输出齿轮71、前进2速齿轮63与前进2速输出齿轮72、前进3速齿轮57与前进3速输出齿轮73、前进4速齿轮64与前进4速输出齿轮74分别始终啮合。另外,后退1速齿轮65、反转齿轮54和后退1速输出齿轮75也始终啮合。第4离合器58进行奇数挡齿轮55与奇数挡轴61的结合(联结)和释放。通过第4离合器58使奇数挡齿轮55与奇数挡轴61
结合,由此能够在惰轮28b与奇数挡轴61之间进行动力传递。第5离合器66进行偶数挡齿轮62与偶数挡轴70的结合(联结)和释放。通过第5离合器66使偶数挡齿轮62与偶数挡轴70结合,由此能够在惰轮28b与偶数挡轴70之间进行动力传递。
[0200]
第6离合器59进行前进1速齿轮56与奇数挡轴61的结合(联结)和释放。通过第6离合器59使前进1速齿轮56与奇数挡轴61结合,由此能够在输出轴53与奇数挡轴61之间进行动力传递。通过第8离合器60使前进3速齿轮57与奇数挡轴61结合,由此能够在输出轴53与奇数挡轴61之间进行动力传递。通过第7离合器67使前进2速齿轮63与偶数挡轴70结合,由此能够在输出轴53与偶数挡轴70之间进行动力传递。通过第10离合器68使前进4速齿轮64与偶数挡轴70结合,由此能够在输出轴53与偶数挡轴70之间进行动力传递。由第9离合器69使后退1速齿轮65与偶数挡轴70结合,由此能够在输出轴53与偶数挡轴70之间进行动力传递。此外,第6离合器59、第7离合器67、第8离合器60、第9离合器69、第10离合器68由犬牙式离合器或带同步器的犬牙式离合器构成。
[0201]
接着,说明多级变速机构26的动作。为了将输入至惰轮28b的动力以前进1速向输出轴53传递,将第4离合器58结合,将第5离合器66释放,将第6离合器59结合,将第8离合器60释放。在该状态下,将第7离合器67、第10离合器68和第9离合器69中的任意两个以上的离合器释放。前进1速相当于后述表5的no1至no4。
[0202]
为了以前进2速向输出轴53进行动力传递,将第5离合器66以及第7离合器67结合,将第4离合器58、第10离合器68以及第9离合器69释放。在该状态下,将第6离合器59和第8离合器60中的任意一方或双方释放。前进2速相当于后述表5的no9至no11。
[0203]
为了以前进3速向输出轴53进行动力传递,将第4离合器58以及第8离合器60结合,将第5离合器66以及第6离合器59释放。在该状态下,将第7离合器67、第10离合器68和第9离合器69中的任意两个以上释放。前进3速相当于后述表5的no5至no8。
[0204]
为了以前进4速向输出轴53进行动力传递,将第5离合器66以及第10离合器68结合,将第4离合器58、第7离合器67以及第9离合器69释放。在该状态下,将第6离合器59和第8离合器60中的任意一方或双方释放。前进4速相当于后述表5的no12至no14。
[0205]
为了以后退1速向输出轴53进行动力传递,将第5离合器66以及第9离合器69结合,将第4离合器58、第7离合器67以及第10离合器68释放。在该状态下,将第6离合器59和第8离合器60中的任意一方或双方释放。后退1速相当于后述表5的no15至no17。
[0206]
当从惰轮28b通过奇数轴51向输出轴53传递动力时,能够进行第7离合器67、第10离合器68以及第9离合器69的结合与释放的切换。由此,能够将前进2速齿轮63、前进4速齿轮64或后退1速齿轮65的任意一个与偶数挡轴70预先结合。同样地,当从惰轮28b通过偶数轴52向输出轴53传递动力时,能够进行第6离合器59以及第8离合器60的结合与释放的切换。由此,能够将前进1速齿轮56或前进3速齿轮57的某一个与奇数挡轴61预先结合。
[0207]
从惰轮28b向输出轴53的动力传递能够从将第4离合器58结合并将第5离合器66释放的状态下,将第4离合器58释放并将第5离合器66结合,由此从经由奇数挡轴61的模式切换为经由偶数挡轴70的模式。同样地,从惰轮28b向输出轴53的动力传递能够从将第4离合器58释放并将第5离合器66结合的状态下,将第4离合器58结合并将第5离合器66释放,由此从经由偶数挡轴70的模式切换为经由奇数挡轴61的模式。
[0208]
然而,第4离合器58与第5离合器66的结合的切换不需要必须交替进行。例如,具有
如下的表5中所示的、从no1~4向no5~8的切换、从no5~8向no1~4的切换。该情况下,在将第4离合器58释放后,将第6离合器59与第8离合器60结合或释放。然后,使释放的第4离合器58结合。另外,还具有从no9~11向no12~14的切换、从no12~14向no9~11的切换、从no9~11向no15~17的切换、从no15~17向no9~11的切换、从no12~14向no15~17的切换、从no15~17向no12~14的切换。该情况下,在将第5离合器66释放后,使第7离合器67、第10离合器68和第9离合器69结合或释放。然后,使释放的第5离合器66结合。
[0209]
[表5]
[0210][0211][0212]
此外,在轮式装载机1进行以砂砾等的翻斗车装载作业为主体的v型循环的情况下,使车辆前进来进行砂砾等的挖掘,然后,使车辆朝向翻斗车移动。此时,举出第1实施方式(即,表4的no1-a)中的具体例来说明。行星式无级变速机构24根据图7所示的行星齿轮机构29的速度关系线y1的关系来控制与第1变速器33相连的第1连结部件30的旋转速度,由此能够使与惰轮28b相连的第3连结部件32的旋转方向反转。但是,在相对于第1太阳齿轮29b的旋转方向而想要使第2太阳齿轮29c的旋转方向倒转的情况(即,向图7的右下方向控制的情况)下,第1太阳齿轮29b的旋转速度变高。同样地,在相对于第2太阳齿轮29c的旋转方向而想要使第1太阳齿轮29b的旋转方向倒转的情况(向图7的左上方向控制的情况)下,第2太阳齿轮29c的旋转速度变高。
[0213]
在这样的情况下,与第1连结部件30连接的第1变速器33不得不采用最高旋转速度的限制更高的设备。因此,为了使与第1变速器33相连的第1连结部件30高速旋转,并使与惰轮28b相连的第3连结部件32的旋转方向从正转成为倒转,而采用最高旋转速度高的高价的第1变速器33。由此,具有行星式无级变速机构24的原价增大的可能性。因此,希望当轮式装载机1后退时使用多级变速机构26,使输出轴53(输出轴23)的旋转方向从前进方向倒转至后退方向。由此,能够使倒转时连接的第1变速器33的旋转速度降低,能够使用廉价的第1变速器33。此外,虽然以第1实施方式(即,表4的no1-a)为例,但第4变形例(即,表4的no1-b)、第5变形例(即,表4的no1-c)的情况下,同样地,使用多级变速机构26,切换输出轴53的旋转方向,由此切换前进方向和后退方向,这种方式能够使倒转时连接的第1变速器33的旋转速度降低,能够使用廉价的第1变速器33。
[0214]
以上那样地,根据第1实施方式,变速装置21具有与动力源(发动机9)相连的输入轴22(输入部件)、与负载(前轴12、后轴13)相连的输出轴23(输出部件)、设于输入轴22与输出轴23之间的行星齿轮机构29(行星机构)、与行星齿轮机构29连接的第1变速器33、对于第1变速器33另外设置的第2变速器34、和变更第1变速器33的旋转速度的控制器25。并且,行星齿轮机构29的构成包括如下三个部件(旋转部件):行星齿轮架29a、以行星齿轮架29a的旋转中心轴为中心自转的第1太阳齿轮29b(第1太阳轮部件)、和以行星齿轮架29a的旋转中心轴为中心自转的第2太阳齿轮29c(第2太阳轮部件)。
[0215]
该情况下,例如,如图4以及图5所示,三个部件中的一个的成为第1部件的行星齿轮架29a经由第2连结部件31(其他部件)与输入轴22连接。行星齿轮架29a之外的成为第2部件的第1太阳齿轮29b经由第1连结部件30、第2离合器36(均为其他部件)与第1变速器33连接。行星齿轮架29a以及第1太阳齿轮29b之外的成为第3部件的第2太阳齿轮29c经由第3连结部件32、惰性元件28、多级变速机构26(均为其他部件)与输出轴23连接。此外,行星齿轮架29a(第1部件)也可以与输入轴22直接连接。第1太阳齿轮29b(第2部件)也可以与第1变速器33直接连接。第2太阳齿轮29c(第3部件)也可以与输出轴23直接连接。
[0216]
在此,在行星齿轮架29a上,支承有一边在以行星齿轮架29a的旋转中心轴s为中心公转的同时与第1太阳齿轮29b和第2太阳齿轮29c一起旋转、一边进行动力传递的行星齿轮29d(行星部件)以及成为反转齿轮的平衡齿轮29e(平衡部件)。并且,行星齿轮机构29将从发动机9传递至行星齿轮机构29的行星齿轮架29a(第1部件)的转矩向第1太阳齿轮29b(第2部件)和第2太阳齿轮29c(第3部件)分配。行星齿轮机构29在行星齿轮架29a、第1太阳齿轮29b和第2太阳齿轮29c之间进行双自由度的旋转运动。第2变速器34将从第1变速器33传递来的动力向负载(输出轴23)或动力源(输入轴22)传递,或将从负载(输出轴23)或动力源(输入轴22)传递来的动力向第1变速器33传递。并且,控制器25通过变更第1变速器33的旋转速度,来变更相对于输入轴22的旋转速度的输出轴23的旋转速度。
[0217]
即,第1实施方式的变速装置21通过行星齿轮机构29进行无级变速,将来自动力源(输入轴22)的动力向负载(输出轴23)传递,或将来自负载(输出轴23)的动力向动力源(输入轴22)传递。该情况下,变速装置21具有设在输入轴22与输出轴23之间的行星齿轮机构29、与行星齿轮机构29连接的第1变速器33、和将从第1变速器33传递来的动力向负载或动力源传递的第2变速器34。并且,行星齿轮机构29具有:与输入轴22连接并支承行星齿轮29d以及平衡齿轮29e的行星齿轮架29a;与第1变速器33连接的第1太阳齿轮29b;和经由惰性元
件28以及多级变速机构26与输出轴23连接的第2太阳齿轮29c。而且,变速装置21具有内部锁止和外部锁止(直结机构27)中的至少一方锁止。并且,变速装置21能够切换基于行星式无级变速机构24的动力传递和基于锁止的动力传递。
[0218]
因此,能够提供传递效率高的变速装置21,能够降低作为作业车辆的轮式装载机1的动力损失。该情况下,能够有效使用构成包括行星齿轮机构29、第1变速器33和第2变速器34的行星式无级变速机构24的增速的变速范围。在此基础上,能够当从基于行星式无级变速机构24的动力传递切换至基于锁止的动力传递时,减少车辆的加减速度的变化。而且,在第1变速器33的旋转速度的上限值和可产生(吸收)转矩的上限值被限制的情况下,能够提供行星齿轮机构29的齿轮比为最佳值的齿轮排列,能够提高行星式无级变速机构24的传递效率。即,即使在使用旋转速度的上限值和可产生(吸收)转矩的上限值被限制的廉价且小型的第1变速器33的情况下,也能够提高行星式无级变速机构24的传递效率。
[0219]
例如,第1实施方式中,在使装卸作业机7不动作,或没有要求装卸作业机7的高操作性的条件下,进行基于锁止机构的动力传递。因此,在该情况下,能够通过传递效率高的齿轮彼此的啮合来进行动力传递(内部锁止、外部锁止)。另一方面,在使装卸作业机7动作,或要求了装卸作业机7的高操作性的条件下,进行基于行星式无级变速机构24的动力传递。因此,能够使行星式无级变速机构24动作,进行无级变速。此外,基于行星式无级变速机构24的动力传递与仅通过齿轮彼此的啮合进行的动力传递(内部锁止、外部锁止)相比具有传递效率变低的可能性。但是,基于行星式无级变速机构24的无级变速能够与基于转矩逆变器的无级变速相比提高传递效率。由此,当将一个发动机9的动力向“用于使车辆行驶的变速装置21”和“用于使装卸作业机7动作的液压泵10”分配时,能够使基于变速装置21的变速造成的发动机9的旋转速度的变化平稳。因此,能够抑制装卸作业机7的动作速度急变,能够提高装卸作业机7的操作性。在此基础上,当将一个发动机9的动力向变速装置21和液压泵10分配时,能够降低由分配导致的动力损失。
[0220]
根据第1实施方式,控制器25使行星齿轮机构29的第1太阳齿轮29b(第2部件)的旋转停止,实现内部锁止的状态。即,控制器25使第1太阳齿轮29b的旋转停止,从在行星齿轮架29a、第1太阳齿轮29b和第2太阳齿轮29c之间进行双自由度的旋转运动的状态变化为进行单自由度的旋转运动的状态。由此,变速装置21在行星齿轮机构29为单自由度的状态下,将从动力源向行星齿轮机构29传递来的动力向负载传递。此时,控制器25向第1变速器33输出使旋转速度为0的指令。或控制器25输出使与第1变速器33连接的部件的旋转通过机械式结合而停止的指令。或控制器25输出将从第1变速器33向第2变速器34传送的动力截断的指令。由此,控制器25使第1太阳齿轮29b的旋转停止。在任意一种情况下,通过使行星齿轮机构29的第1太阳齿轮29b的旋转停止,都能够实现内部锁止,能够提高传递效率。
[0221]
根据第1实施方式,变速装置21具有第1动力传递路径(行星式无级变速机构24)和第2动力传递路径(直结机构27)这两个动力传递路径。即,将通过行星齿轮机构29从动力源向负载(输出轴23)传递动力的动力传递路径设为第1动力传递路径。在该情况下,在变速装置21中,与第1动力传递路径并列地设有第2动力传递路径。第2动力传递路径是不经由行星齿轮机构29而通过齿轮彼此的啮合向负载(输出轴23)传递动力的直结机构27(外部锁止机构)。第2动力传递路径(直结机构27)具有切换联结和释放的第1离合器27c。控制器25使第1离合器27c联结,通过第2动力传递路径(直结机构27)进行动力传递。由此,例如,与仅进行
内部锁止的构成相比较,能够提高传递效率。
[0222]
根据第1实施方式,将行星齿轮架29a(第1部件)的旋转速度和第2太阳齿轮29c(第3部件)的旋转速度相同时的速度比设为同步旋转速度比。另外,将通过将第1离合器27c联结而经由第2动力传递路径(直结机构27)进行动力传递时的第2太阳齿轮29c(第3部件)的旋转速度除以动力源的旋转速度得到的值设为锁止旋转速度比。该情况下,锁止旋转速度比大于同步旋转速度比。因此,当通过作为外部锁止机构的第2动力传递路径传递动力时,能够增速。
[0223]
根据第1实施方式,在第1太阳齿轮29b(第2部件)与第1变速器33之间设有对第1太阳齿轮29b(第2部件)与第1变速器33之间的动力的传递和释放进行切换的第2离合器36。并且,控制器25当作业车辆(轮式装载机1)停止时,通过使第2离合器36释放而切断第1太阳齿轮29b(第2部件)与第1变速器33之间的动力传递。由此,当轮式装载机1的车速为0时,能够阻止向第1变速器33的动力传递。
[0224]
根据第1实施方式,控制器25为了使第1太阳齿轮29b(第2部件)停止,而将第2离合器36联结。因此,当内部锁止时,能够使第1太阳齿轮29b(第2部件)的旋转停止。另外,第1实施方式中,在第2变速器34与负载或动力源之间,设有对第2变速器34与负载或动力源之间的动力的传递和释放进行切换的第3离合器37。并且,控制器25当第1太阳齿轮29b(第2部件)停止时,使第3离合器37释放。因此,当内部锁止时,能够阻止向第2变速器34的动力传递。此外,内部锁止时,第2离合器36必须联结,但第3离合器37可以为释放或联结的某一方。
[0225]
根据第1实施方式,控制器25当第1离合器27c联结时,使第2离合器36释放。因此,当外部锁止时,能够阻止向第1变速器33的动力传递。另外,控制器25当第1离合器27c联结时,使第3离合器37释放。因此,当外部锁止时,能够阻止向第2变速器34的动力传递。此外,当外部锁止时,第2离合器36和第3离合器37可以为释放或联结的某一方。
[0226]
根据第1实施方式,变速装置21在第2太阳齿轮29c(第3部件)与输出轴23(输出部件)之间设有多级变速机构26。多级变速机构26具有第1输出传递路径(奇数轴51)和第2输出传递路径(偶数轴52)。该情况下,第1输出传递路径(奇数轴51)在第2太阳齿轮29c(第3部件)与输出轴23(输出部件)之间,齿轮啮合次数为奇数次。第2输出传递路径(偶数轴52)在第2太阳齿轮29c(第3部件)与输出轴23(输出部件)之间,齿轮啮合次数为奇数次和偶数次的双方。具体地,第2输出传递路径(偶数轴52)中的、从惰轮28b经由偶数挡齿轮62、第5离合器66、第9离合器69、反转齿轮54、后退1速齿轮75向输出轴53传递的路径,为偶数次的齿轮啮合次数。基于其他路径的第2太阳齿轮29c(第3部件)与输出轴23(输出部件)的齿轮啮合次数为奇数次。并且,第1输出传递路径(奇数轴51)具有对第1输出传递路径的动力的传递和释放进行切换的第1输出离合器(第4离合器58、第6离合器59、第8离合器60)。第2输出传递路径(偶数轴52)具有对第2输出传递路径的动力的传递和释放进行切换的第2输出离合器(第5离合器66、第7离合器67、第10离合器68、第9离合器69)。控制器25通过对使第1输出离合器(例如第4离合器58、第6离合器59)联结并使第2输出离合器(例如第5离合器66)释放的正转模式(例如1速模式)、和使第1输出离合器(例如第4离合器58)释放并使第2输出离合器(例如第5离合器66、第9离合器69)联结的倒转模式(后退模式)进行切换,而使轮式装载机1(车辆)的行进方向反转。因此,变速装置21能够使负载(输出轴23)的旋转方向反转。
[0227]
根据第1实施方式,在变速装置21中设有作为副变速机构的多级变速机构26。并
且,第2变速器34与设在行星齿轮机构29与多级变速机构26之间的惰性元件(具体地,为旋转元件的惰轮28b)连接。此外,如图20所示的第6变形例那样,第2变速器34也可以与输出轴23(输出部件)连接。即,如后述图30至图39所示,第2变速器34可以作为与如下旋转元件连接的构成,这些旋转元件包括设在输入轴22(输入部件)与驱动源(发动机9)之间的旋转元件、构成多级变速机构26的旋转元件、设在多级变速机构26与输出轴23(输出部件)之间的旋转元件、输出轴23(输出部件)、或设在输出轴23与负载之间的旋转元件。
[0228]
接着,图21至图24表示第2实施方式。第2实施方式的特征在于,由行星齿轮架、太阳齿轮和环形齿轮来构成行星齿轮机构。此外,第2实施方式中,对于与第1实施方式相同的构成元件标注同一附图标记,并省略其说明。
[0229]
第1实施方式中,以由行星齿轮架和两个太阳齿轮来构成行星式无级变速机构24的行星齿轮机构29的情况为例进行了说明。相对于此,第2实施方式中,使行星式无级变速机构24的行星齿轮机构81由行星齿轮架81a、太阳齿轮81b和环形齿轮81c构成。如下的表6表示行星齿轮机构81的构成元件(行星齿轮架、太阳齿轮、环形齿轮)的组合。在任意情况下都能够进行动力传递。从能够提高行星式无级变速机构24的传递效率,能够缩小第1变速器33的最大吸收转矩,且能够小型且轻量地构成行星式无级变速机构24整体的角度看,表6中的“no2-a”为最合适。
[0230]
[表6]
[0231][0232]
如图21以及图22所示,第2实施方式中,行星齿轮机构81具有与第1部件对应的行星齿轮架81a、与第2部件对应的太阳齿轮81b、与第3部件对应的环形齿轮81c、和行星齿轮81d。此外,太阳齿轮81b、环形齿轮81c,行星齿轮81d可以不是基于齿轮(齿轮)的啮合的动力传递,例如可以是基于罗拉辊(外周面)的摩擦的动力传递。
[0233]
发动机9经由第2连结部件31与行星齿轮架81a结合。太阳齿轮81b经由第1连结部件30与第1变速器33连接。环形齿轮81c经由第3连结部件32与惰性元件28(惰轮28b)连接。太阳齿轮81b与行星齿轮81d啮合。另外,行星齿轮81d与环形齿轮81c啮合。行星齿轮81d的自转轴sp(图23)支承于行星齿轮架81a。因此,行星齿轮81d一边以行星齿轮机构81的中心轴s(图23)为中心公转一边自转。
[0234]
接着,说明由行星齿轮架81a、太阳齿轮81b和环形齿轮81c构成的行星齿轮机构81的动作。以下,在表6的“no2-a”、“no2-b”、“no2-c”、“no2-d”、“no2-f”的全部条件下成立。
[0235]
首先,说明行星齿轮机构81的三个部件(行星齿轮架81a、太阳齿轮81b、环形齿轮
81c)的转矩的分配。图23是从动力源侧观察行星齿轮机构81的剖视图。行星齿轮架81a、太阳齿轮81b以及环形齿轮81c同心配置。即,行星齿轮架81a、太阳齿轮81b以及环形齿轮81c的中心轴s(旋转中心轴)一致。行星齿轮81d以与太阳齿轮81b的外周和环形齿轮81c的内周接触的方式配置。行星齿轮81d与太阳齿轮81b以及环形齿轮81c啮合。行星齿轮架81a、太阳齿轮81b以及环形齿轮81c以使各自的齿轮的啮合成立的方式,能够以中心轴s为中心自转,且以在其他方向上无法移动的方式由行星式无级变速机构24的壳体支承。行星齿轮81d以能够以作为行星齿轮81d的中心轴的自转轴sp为中心自转且在其他方向上无法移动的方式由行星齿轮架81a支承。行星齿轮81d一边以行星齿轮架81a的中心轴s为中心公转一边以行星齿轮81d的中心轴sp为中心自转。
[0236]
如图23所示,行星齿轮机构81的制约条件为,需要太阳齿轮81b、环形齿轮81c和行星齿轮81d啮合。另外,为了确保齿轮的强度,需要增大行星齿轮81d的直径。即,行星齿轮机构81的制约条件为,太阳齿轮81b的啮合半径rs大幅小于环形齿轮81c的啮合半径rr。
[0237]
表6的“no2-a”的构成为,行星齿轮架81a跟与发动机9(动力源)相连的第2连结部件31连接。因此,行星齿轮架81a的转矩tc是发动机9能够产生的转矩。太阳齿轮81b跟与第1变速器33相连的第1连结部件30连接。因此,太阳齿轮81b的转矩ts是第1变速器33能够产生的转矩。环形齿轮81c跟与惰性元件28相连的第3连结部件32连接。因此,环形齿轮81c的转矩tr是从惰轮28b受到的转矩反力。
[0238]
表6的“no2-b”的构成为,环形齿轮81c与第2连结部件31连接。因此,环形齿轮81c的转矩tr是发动机9能够产生的转矩。行星齿轮架81a与第1连结部件30连接。因此,行星齿轮架81a的转矩tc是第1变速器33能够产生的转矩。太阳齿轮81b与第3连结部件32连接。因此,太阳齿轮81b的转矩ts是从惰轮28b受到的转矩反力。
[0239]
表6的“no2-c”的构成为,行星齿轮架81a与第2连结部件31连接,环形齿轮81c与第1连结部件30连接,太阳齿轮81b与第3连结部件32连接。表6的”no2-d”的构成为,环形齿轮81c与第2连结部件31连接,太阳齿轮81b与第1连结部件30连接,行星齿轮架81a与第3连结部件32连接。表6的“no2-e”的构成为,太阳齿轮81b与第2连结部件31连接,环形齿轮81c与第1连结部件30连接,行星齿轮架81a与第3连结部件32连接。表6的“no2-f”的构成为,太阳齿轮81b与第2连结部件31连接,行星齿轮架81a与第1连结部件30连接,环形齿轮81c与第3连结部件32连接。
[0240]
接着,说明太阳齿轮81b的转矩ts、环形齿轮81c的转矩tr以及行星齿轮架81a的转矩tc的关系性。太阳齿轮81b和环形齿轮81c经由行星齿轮81d啮合。因此,太阳齿轮81b与行星齿轮81d的啮合切向力、和行星齿轮81d与环形齿轮81c的啮合切向力相等。即,能够获得如下的数式16以及数式17。
[0241]
[数式16]
[0242]
ts=rs/(rs+rr)
×
tc
[0243]
[数式17]
[0244]
tr=rr/(rs+rr)
×
tc
[0245]
根据作用反作用的关系,能够获得如下的数式18。
[0246]
[数式18]
[0247]
tc=ts+tr
[0248]
根据这些数式16、数式17、数式18,太阳齿轮81b的转矩ts、环形齿轮81c的转矩tr以及行星齿轮架81a的转矩tc能够通过环形齿轮81c的啮合半径rr以及太阳齿轮81b的啮合半径rs来计算。环形齿轮81c的啮合半径rr以及太阳齿轮81b的啮合半径rs由各自的齿轮的啮合半径所决定,由此在行星式无级变速机构24进行动力传递的过程中无法变更。因此,太阳齿轮81b的转矩ts、环形齿轮81c的转矩tr以及行星齿轮架81a的转矩tc的比例在行星式无级变速机构24进行动力传递的期间内是不变的。
[0249]
控制器25基于该法则,输出对第1变速器33进行控制的信号,控制与第1变速器33相连的第1连结部件30(例如太阳齿轮81b)的转矩。即,控制器25通过控制第1变速器33来控制第1连结部件30(例如太阳齿轮81b)的转矩。由此,控制器25间接控制与发动机9相连的第2连结部件31(例如行星齿轮架81a)的转矩和与惰性元件28相连的第3连结部件32(例如环形齿轮81c)的转矩。该结果为,能够在与发动机9相连的第2连结部件31(例如行星齿轮架81a)跟与惰性元件28相连的第3连结部件32(例如环形齿轮81c)之间,控制传递转矩。
[0250]
接着,说明太阳齿轮81b的自转速度、环形齿轮81c的自转速度以及行星齿轮架81a的自转速度的关系性。首先,太阳齿轮81b和环形齿轮81c经由行星齿轮81d啮合。太阳齿轮81b和环形齿轮81c以中心轴s为中心自转。行星齿轮81d通过行星齿轮架81a在自转方向上自由旋转,且相对于行星齿轮架29a的中心轴s在公转方向上被拘束。若根据这些求旋转速度的关系,则如下的数式19成立。此外,数式19中的“kb”跟数式20相同。此外,将行星齿轮架81a的自转速度设为“vc”,将太阳齿轮81b的自转速度设为“vs”,将环形齿轮81c的自转速度设为“vr”。
[0251]
[数式19]
[0252]
vr/vc=-kb{vs/vc}+(kb+1)
[0253]
[数式20]
[0254]
kb=(rs/rr)
[0255]
图24表示行星齿轮机构81的旋转速度的关系。图24中的速度关系线y2用线图表示数式19。假设行星齿轮架81a的自转速度固定。该情况下,若环形齿轮81c的自转速度变高,则太阳齿轮81b的自转速度变低。相反地,若环形齿轮81c的自转速度变低,则太阳齿轮81b的自转速度变高。控制器25基于该法则,输出对第1变速器33进行控制的信号,控制与第1变速器33相连的第1连结部件30(例如太阳齿轮81b)的旋转速度。即,控制器25通过控制第1变速器33而控制第1连结部件30(例如太阳齿轮81b)的旋转速度。由此,控制器25间接地控制与发动机9相连的第2连结部件31(例如行星齿轮架81a)的旋转速度和与惰性元件28相连的第3连结部件32(例如环形齿轮81c)的旋转速度。该结果为,在与发动机9相连的第2连结部件31(例如行星齿轮架81a)跟与惰性元件28相连的第3连结部件32(例如环形齿轮81c)之间,能够控制变速比。
[0256]
如上述那样,行星齿轮机构81需要使太阳齿轮81b、环形齿轮81c和行星齿轮81d啮合。另外,为了确保齿轮的强度需要增大行星齿轮81d的直径。但是,若增大行星齿轮81d的直径则行星齿轮机构81会大型化。即,行星齿轮机构81的构造的制约在于,若想要将行星齿轮机构81设计为小型,则太阳齿轮81b的啮合半径rs会大幅小于环形齿轮81c的啮合半径rr。因此,行星齿轮机构81具有难以使kb值比0.3大,过度小于理想kb值的可能性。
[0257]
根据该构造的制约,行星齿轮机构81从转矩tc、ts、tr的关系式(数式16、数式17、
数式18)以及自转速度vs、vr、vc的关系式(数式19、数式20)中,与第1变速器33能够吸收的转矩和可允许的最高旋转速度相应地,调整太阳齿轮81b的啮合半径rs和环形齿轮81c的啮合半径rr。由此,将数式20的kb值设定为理想值,并将图24所示的速度关系线y2的倾斜设为理想值,由此能够降低第1变速器33能够吸收的转矩和可允许的最高旋转速度的双方。但是,若这样做,kb值变得过小,难以同时实现。即,第2实施方式与第1实施方式相比较,有可能不利于提供使第1变速器33能够吸收的转矩和可允许的最高旋转速度的双方为最佳化的行星齿轮机构81的排列。即,第2实施方式与第1实施方式相比较,具有第1变速器33成为高价的倾向,且具有行星式无级变速机构24的传递效率降低的可能性。
[0258]
此外,第1变速器33的大小以及价格与能够吸收的转矩的大小成比例。因此,希望第1变速器33的吸收转矩较小。第2实施方式(即,表6的no2-a)中举出具体例来说明。首先,希望缩小数式20的kb值。另外,向第1变速器33分配的转矩越小,越能够提高行星式无级变速机构24的传递效率。因此,缩小数式20的kb值,对于行星式无级变速机构24来说是有利的。
[0259]
另一方面,若在图24所示的速度关系线y2中缩小kb值,则第1变速器33的旋转速度会上升。因此,希望kb值在不超过第1变速器33能够允许的最高旋转速度的范围内缩小。由太阳齿轮、环形齿轮和行星齿轮架构成的行星齿轮机构81具有如下的构造制约,即,若想要将行星齿轮机构81设计为小型,则太阳齿轮81b的啮合半径rs大幅小于环形齿轮81c的啮合半径rr。因此,若想要将行星齿轮机构81设计为小型,则kb值变得过小。该结果为,具有第1变速器33的旋转速度变高,超出第1变速器33的可允许的最高旋转速度的可能性。因此,能够以高旋转进行驾驶的行星齿轮机构81变为必要。即,具有如下可能性:第1变速器33为与高旋转对应的高价设备,行星齿轮机构81为大型设备,且行星式无级变速机构24的传递效率降低。
[0260]
接着,比较第1实施方式的行星齿轮机构29和第2实施方式的行星齿轮机构81。即,这两个行星齿轮机构29、81各自具有特征,无法一概而论地断言哪个更好。即,在能够自由设定第1变速器33能够吸收的转矩和第1变速器33的可允许的最高旋转速度的情况下优选采用构造简洁的行星齿轮机构81。由此,通过与行星齿轮机构81的太阳齿轮81b的啮合半径rs和环形齿轮81c的啮合半径rr的构造的制约(kb值)配合地设计第1变速器33,能够使用小型且廉价的第1变速器33。该结果为,能够使行星齿轮机构81简洁,且能够提高行星式无级变速机构24的传递效率。
[0261]
另一方面,在无法自由设定第1变速器33能够吸收的转矩和可允许的最高旋转速度的情况下,优选采用第1实施方式的行星齿轮机构29。该情况下,希望将ka值设定为理想值,将图7所示的速度关系线y1的倾斜设为理想值,由此能够完全使用第1变速器33能够吸收的转矩和可允许的最高旋转速度。由此能够使用小型且廉价的第1变速器33且能够提高行星式无级变速机构24的传递效率。
[0262]
接着,说明第2实施方式的行星式无级变速机构24的内部锁止变速比in。内部锁止动作时,向上述的数式19中作为0而代入与第1变速器33相连的第1连结部件30的旋转速度,由此能够计算内部锁止变速比in。例如,第2实施方式(表6的no2-a)中,向数式19中,作为0而代入与第1连结部件30连接的太阳齿轮81b的自转速度vs。即,内部锁止变速比in为如下的数式21。
[0263]
[数式21]
[0264]
vr/vc=kb+1
[0265]
由此
[0266]
in=kb+1
[0267]
图25所示的第7变形例(表6的no2-b)中,使数式19变形,并且作为0而代入与第1连结部件30连接的行星齿轮架81a的自转速度vc。即,内部锁止变速比in为如下的数式22。
[0268]
[数式22]
[0269][0270]
由此
[0271][0272]
图26所示的第8变形例(表6的no2-c)中,向数式19中作为0而代入与第1连结部件30连接的环形齿轮81c的自转速度vr即,内部锁止变速比in为如下的数式23。
[0273]
[数式23]
[0274][0275]
由此
[0276][0277]
图27所示的第9变形例(表6的no2-d)中,向数式19中作为0而代入与第1连结部件30连接的太阳齿轮81b的自转速度vs。即,内部锁止变速比in为如下的数式24。
[0278]
[数式24]
[0279][0280]
由此
[0281][0282]
图28所示的第10变形例(表6的no2-e)中,向数式19中作为0而代入与第1连结部件30连接的环形齿轮81c的自转速度vr。即,内部锁止变速比in为如下的数式25。
[0283]
[数式25]
[0284][0285]
由此
[0286][0287]
图29所示的第11变形例(表6的no2-f)中,使数式19变形,并作为0而代入与第1连结部件30连接的行星齿轮架81a的自转速度vc。即,内部锁止变速比in为如下的数式26。
[0288]
[数式26]
[0289]
vr/vs=-kb
[0290]
由此
[0291]
in=vr/vs=-nb
[0292]
这样地,第2实施方式的行星式无级变速机构24的内部锁止变速比in依赖于行星齿轮机构81的齿轮的组合、和kb。
[0293]
以上那样地,根据第2实施方式,变速装置21具有输入轴22(输入部件)、输出轴23(输出部件)、行星齿轮机构81(行星机构)、第1变速器33、第2变速器34和控制器25。并且,行星齿轮机构81的构成包括如下的三个部件(旋转部件):行星齿轮架81a、以行星齿轮架81a的旋转中心轴为中心自转的太阳齿轮81b(太阳轮部件)、和与太阳齿轮81b相比位于径向外侧且以行星齿轮架81a的旋转中心轴为中心自转的环形齿轮81c(环形部件)。
[0294]
该情况下,例如,如图21以及图22所示,作为三个部件中的一个的成为第1部件的行星齿轮架81a经由第2连结部件31(其他部件)与输入轴22连接。行星齿轮架81a之外的成为第2部件的太阳齿轮81b经由第1连结部件30、第2离合器36(均为其他部件)与第1变速器33连接。行星齿轮架81a以及太阳齿轮81b之外的成为第3部件的环形齿轮81c经由第3连结部件32、惰性元件28、多级变速机构26(均为其他部件)与输出轴23连接。此外,行星齿轮架81a(第1部件)也可以与输入轴22直接连接。太阳齿轮81b(第2部件)也可以与第1变速器33直接连接。环形齿轮81c(第3部件)也可以与输出轴23直接连接。
[0295]
在此,在行星齿轮架81a上,支承有一边在以行星齿轮架81a的旋转中心轴s为中心公转的同时与太阳齿轮81b和环形齿轮81c一起旋转、一边进行动力传递的行星齿轮81d(行星部件)。并且,行星齿轮机构81将从发动机9传递至行星齿轮机构81的行星齿轮架81a(第1部件)的转矩向太阳齿轮81b(第2部件)和环形齿轮81c(第3部件)分配。行星齿轮机构81在行星齿轮架81a、太阳齿轮81b与环形齿轮81c之间进行双自由度的旋转运动。第2变速器34将从第1变速器33传递来的动力向负载(输出轴23)或动力源(输入轴22)传递,或将从负载(输出轴23)或动力源(输入轴22)传递来的动力向第1变速器33传递。并且,控制器25通过变更第1变速器33的旋转速度,来变更相对于输入轴22的旋转速度的输出轴23的旋转速度。
[0296]
即,第2实施方式的变速装置21通过行星齿轮机构81进行无级变速,将来自动力源(输入轴22)的动力向负载(输出轴23)传递,或将来自负载(输出轴23)的动力向动力源(输入轴22)传递。该情况下,变速装置21具有设在输入轴22与输出轴23之间的行星齿轮机构81、与行星齿轮机构81连接的第1变速器33、和将从第1变速器33传递来的动力向负载或动力源传递的第2变速器34。并且,行星齿轮机构81具有与输入轴22连接并支承有行星齿轮81d的行星齿轮架29a、与第1变速器33连接的太阳齿轮81b、和经由惰性元件28以及多级变速机构26与输出轴23连接的环形齿轮81c。而且,变速装置21具有内部锁止和外部锁止(直结机构27)中的至少一方的锁止。并且,变速装置21能够切换基于行星式无级变速机构24的动力传递和基于锁止的动力传递。因此,第2实施方式也能够起到与第1实施方式同样的作用和效果。
[0297]
根据第2实施方式,与第1实施方式同样地,变速装置21具有第1动力传递路径(行星式无级变速机构24)和第2动力传递路径(直结机构27)这两个动力传递路径。由此,例如,与仅进行内部锁止的构成相比较,能够提高传递效率。
[0298]
根据第2实施方式,与第1实施方式同样地,控制器25使行星齿轮机构81的太阳齿轮81b(第2部件)的旋转停止,实现内部锁止的状态。该情况下,控制器25向第1变速器33输出使旋转速度为0的指令。或控制器25输出使与第1变速器33连接的部件的旋转通过机械式
结合而停止的指令。或控制器25输出将从第1变速器33向第2变速器34输送的动力截断的指令。由此,控制器25使太阳齿轮81b的旋转停止。在任意情况下,通过使行星齿轮机构81的太阳齿轮81b的旋转停止都能够实现内部锁止,能够提高传递效率。
[0299]
根据第2实施方式,与第1实施方式同样地,锁止旋转速度比大于同步旋转速度比。因此,当通过作为外部锁止机构的第2动力传递路径(直结机构27)传递动力时,能够增速。
[0300]
根据第2实施方式,与第1实施方式同样地,控制器25在车辆停止时,使第2离合器36释放。因此,当车速为0时,能够阻止向第1变速器的动力传递。
[0301]
根据第2实施方式,与第1实施方式同样地,控制器25为了使太阳齿轮81b(第2部件)停止,而使第2离合器36联结。并且,使第3离合器37释放。因此,当内部锁止时,能够阻止向第2变速器34的动力传递。
[0302]
根据第2实施方式,与第1实施方式同样地,控制器25当第1离合器27c被联结时,使第2离合器36和第3离合器37中的至少一方的离合器释放。因此,当外部锁止时,能够阻止向第1变速器33和第2变速器34中的至少一方的变速器的动力传递。
[0303]
根据第2实施方式,与第1实施方式同样地,变速装置21在环形齿轮81c(第3部件)与输出轴23(输出部件)之间设有成为副变速机构的多级变速机构26。因此,变速装置21能够使负载(输出轴23)的旋转方向反转。
[0304]
根据第2实施方式,与第1实施方式同样地,第2变速器34与设在行星齿轮机构81与多级变速机构26之间的惰性元件28(具体地,为旋转元件的惰轮28b)连接。此外,如图30至图39所示,第2变速器34也可以作为与如下元件连接的构成,这些元件包括设在输入轴22(输入部件)与驱动源(发动机9)之间的旋转元件、构成多级变速机构26的旋转元件、设在多级变速机构26与输出轴23(输出部件)之间的旋转元件、输出轴23(输出部件)、或设在输出轴23与负载之间的旋转元件。
[0305]
即,第1实施方式以及第2实施方式中构成为,将第2变速器34与行星齿轮机构29相比更加连接于输出轴23(输出部件)侧,即,将第2变速器34连接至行星齿轮机构29与输出轴23之间。相对于此,图30表示第12变形例。第12变形例中,第2变速器34与设于输入轴22的直结机构27的输入齿轮27a连接。即,第2变速器34连接在行星齿轮机构29与输入轴22(输入部件)之间。这样地,第2变速器34可以构成为,与行星齿轮机构29相比更加连接于发动机9侧(驱动源侧)。此外,虽图示省略,但也可以将第2变速器34与直结机构27的锁止齿轮27b连接。
[0306]
图31表示第13变形例。第13变形例中,第2变速器34与跟惰性元件28相连的第3连结部件32连接。图32表示第14变形例。第14变形例中,第2变速器34与多级变速机构26的奇数挡齿轮55连接。此外,虽图示省略,但也可以将第2变速器34与多级变速机构26的偶数挡齿轮62连接。图33表示第15变形例。第15变形例中,第2变速器34与多级变速机构26的前进1速齿轮56。图34表示第16变形例,第2变速器34与多级变速机构26的前进3速齿轮57连接。图35表示第17变形例,第2变速器34与多级变速机构26的前进2速齿轮63连接。图36表示第18变形例,第2变速器34与多级变速机构26的前进4速齿轮64连接。图37表示第19变形例,第2变速器34与多级变速机构26的后退1速齿轮65连接。此外,虽图示省略,但也可以将第2变速器34与多级变速机构26的反转齿轮54连接。
[0307]
图38表示第20变形例,第2变速器34与多级变速机构26的输出轴53(变速装置21的
输出轴23)连接。此外,虽图示省略,但也可以将第2变速器34与多级变速机构26的1速输出齿轮71、2速输出齿轮72、3速输出齿轮73、4速输出齿轮74或后退1速输出齿轮75连接。图39表示第21变形例,第2变速器34与变速装置21的输出轴23相比更加连接于负载侧(前轴12侧、后轴13侧)。此外,虽图示省略,但也可以将第2变速器34与前轴12、后轴13、前传动轴14或后传动轴15连接。根据这些变形例、例如图33至图39所示的第15至第21变形例,通过使第2变速器34与惰轮28b相比更加连接于输出轴53侧,能够使惰性元件28(惰轮28b)以及多级变速机构26为小型。由此,能够廉价制造变速装置21。
[0308]
此外,第1实施方式中,以具有多级变速机构26的变速装置21为进行了说明。但是,并不限于此,变速装置21也可以省略多级变速机构26。该情况下,例如,通过使输出轴23的输出齿轮与第3连结部件32螺合,能够将行星式无级变速机构24的行星齿轮机构29与输出轴23(输出部件)连接。另外,该情况下,第2变速器34可以与行星齿轮机构29相比更加连接于输出轴23侧(输出部件侧),也可以与行星齿轮机构29相比更加连接于输入轴22侧(输入部件侧)。而且,第1实施方式中,以具有作为外部锁止机构的直结机构27的变速装置21为例进行了说明,但也可以省略直结机构27。这些情况针对第2实施方式以及各变形例也是同样。
[0309]
第1实施方式中,以将变速装置21搭载于轮式装载机1的情况为例进行了说明。但是,并不限于此,变速装置21例如可以搭载于液压挖掘机、液压起重机、翻斗卡车、叉车等轮式装载机以外的作业车辆(工程机械)。另外,不限于作业车辆,也可以作为组装至汽车、铁路车辆等各种车辆、或各种产业机械、普通机械的变速装置而广泛适用。该适用针对第2实施方式以及各变形例也是同样。
[0310]
另外,上述的各实施方式以及各变形例是示例,当然能够进行不同的实施方式以及变形例所示的构成的部分置换或组合。
[0311]
附图标记说明
[0312]
1轮式装载机(作业车辆)
[0313]
21、21a、21b、21c、21d、21e变速装置
[0314]
22输入轴(输入部件)
[0315]
23、23a、23b输出轴(输出部件)
[0316]
24行星式无级变速机构(第1动力传递路径)
[0317]
25控制器
[0318]
26多级变速机构(副变速机构、第1输出传递路径、第2输出传递路径)
[0319]
27直结机构(外部锁止机构、第2动力传递路径)
[0320]
27c第1离合器
[0321]
28惰性元件
[0322]
29行星齿轮机构(行星机构)
[0323]
29a行星齿轮架(第1部件、第2部件、第3部件)
[0324]
29b第1太阳齿轮(第1太阳轮部件、第1部件、第2部件、第3部件)
[0325]
29c第2太阳齿轮(第2太阳轮部件、第1部件、第2部件、第3部件)
[0326]
33第1变速器
[0327]
34第2变速器
[0328]
36第2离合器
[0329]
51奇数轴(第1输出传递路径)
[0330]
52偶数轴(第2输出传递路径)
[0331]
58第4离合器(第1输出离合器)
[0332]
66第5离合器(第2输出离合器)
[0333]
69第9离合器(第2输出离合器)
[0334]
81行星齿轮机构(行星机构)
[0335]
81a行星齿轮架(第1部件、第2部件、第3部件)
[0336]
81b太阳齿轮(太阳轮部件、第1部件、第2部件、第3部件)81c环形齿轮(环形部件、第1部件、第2部件、第3部件)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1