一种自动变速器同步器特性点自学习方法及系统与流程
1.本发明属于汽车变速器技术领域,具体涉及一种自动变速器同步器特性点自学习方法及系统。
背景技术:
2.由于零部件制造尺寸差异,每台变速器在整车控制中具有不同的最佳换挡控制参数。
3.现有一种湿式双离合器液压控制系统,包括依次顺序连接形成闭环的变速箱控制单元tcu、驱动电路、液压模块上的并列设置的电磁阀以及两个离合器,其中,tcu作为整个控制系统中枢,将来自离合器反馈的压力以及来自电磁阀的电流信号经过与控制系统中本身计算得到的当前的目标压力信号经过计算处理,对驱动电路发出占空比信号;占空比信号驱动驱动电路从而实现对电磁阀的控制,电磁阀控制液压模块对同步器的压力,从而实现同步器换挡动作,
4.上述方法是在驾驶过程中采用算法来改善同步器换挡性能,大大增加了控制系统的运算量,对硬件性能提出了更高的要求。
技术实现要素:
5.本发明实施例所要解决的技术问题在于,现有技术在解决同步器由于零部件制造尺寸差异导致的换挡性能不一致问题时需要更大的运算量和更高的硬件配置。
6.为解决上述技术问题,本发明提供了一种自动变速器同步器特性点自学习方法,在下线台架上对自动变速器同步器特性点进行学习,自学习方法包括:
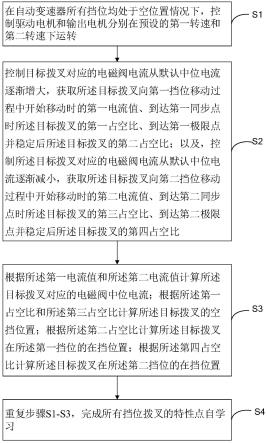
7.步骤s1,在自动变速器所有挡位均处于空位置情况下,控制驱动电机和输出电机分别在预设的第一转速和第二转速下运转;
8.步骤s2,控制目标拨叉对应的电磁阀电流从默认中位电流逐渐增大,获取所述目标拨叉向第一挡位移动过程中开始移动时的第一电流值、到达第一同步点时所述目标拨叉的第一占空比、到达第一极限点并稳定后所述目标拨叉的第二占空比;
9.以及,控制所述目标拨叉对应的电磁阀电流从默认中位电流逐渐减小,获取所述目标拨叉向第二挡位移动过程中开始移动时的第二电流值、到达第二同步点时所述目标拨叉的第三占空比、到达第二极限点并稳定后所述目标拨叉的第四占空比;
10.步骤s3,根据所述第一电流值和所述第二电流值计算所述目标拨叉对应的电磁阀中位电流;
11.根据所述第一占空比和所述第三占空比计算所述目标拨叉的空挡位置;
12.根据所述第二占空比计算所述目标拨叉在所述第一挡位的在挡位置;
13.根据所述第四占空比计算所述目标拨叉在所述第二挡位的在挡位置;
14.步骤s4,重复步骤s1-s3,完成所有挡位拨叉的特性点自学习。
15.进一步地,所述第二转速等于预设的目标转速除以第一挡位的速比,所述步骤s2
中,获取所述目标拨叉向第一挡位移动过程中到达第一同步点时所述目标拨叉的第一占空比,具体包括:
16.控制所述目标拨叉持续移动,当所述第一挡位的离合器转速达到所述目标转速时,读取所述目标拨叉的位置传感器的第一占空比。
17.进一步地,所述步骤s2中,获取所述目标拨叉向第一挡位移动过程中到达第一极限点并稳定后所述目标拨叉的第二占空比,具体包括:
18.将所述目标拨叉对应的电磁阀电流切换到最大值,直到所述目标拨叉的位置传感器的占空比不再发生变化时,将所述目标拨叉对应的电磁阀电流切换至默认中位电流,待所述目标拨叉的位置稳定后,读取所述目标拨叉的位置传感器的第二占空比。
19.进一步地,所述第二转速等于预设的目标转速除以第二挡位的速比,所述步骤s2中,获取所述目标拨叉向第二挡位移动过程中到达第二同步点时所述目标拨叉的第三占空比,具体包括:
20.控制所述目标拨叉持续移动,当所述第二挡位的离合器转速达到所述目标转速时,读取所述目标拨叉的位置传感器的第三占空比。
21.进一步地,所述步骤s2中,获取所述目标拨叉向第二挡位移动过程中到达第二极限点并稳定后所述目标拨叉的第四占空比,具体包括:
22.将所述目标拨叉对应的电磁阀电流切换到最小值,直到所述目标拨叉的位置传感器的占空比不再发生变化时,将所述目标拨叉对应的电磁阀电流切换至默认中位电流,待所述目标拨叉的位置稳定后,读取所述目标拨叉的位置传感器的第四占空比。
23.进一步地,所述自动变速器同步器特性点计算方法如下:
24.所述目标拨叉对应的电磁阀中位电流i=(i1+i2)/2;
25.所述目标拨叉的空挡位置s0=(dr1+dr3)
×
l/2;
26.所述目标拨叉在所述第一挡位的在挡位置s1=dr2×
l;
27.所述目标拨叉在所述第二挡位的在挡位置s2=dr4×
l;
28.其中,i1、i2分别为第一电流值和第二电流值,dr1、dr2、dr3、dr4分别为第一占空比、第二占空比、第三占空比和第四占空比,l为所述目标拨叉在轴上的行程。
29.进一步地,所述步骤s2中,控制目标拨叉对应的电磁阀电流从默认中位电流逐渐增大或逐渐减小的步骤中,电流增大或减小的速率为0.125ma/10ms。
30.进一步地,所述第一转速为1500rpm。
31.进一步地,所述目标转速为2500rpm。
32.一种自动变速器同步器特性点自学习系统,包括:
33.电流控制单元,用于控制目标拨叉对应的电磁阀电流从默认中位电流逐渐增大或逐渐减小;
34.电流获取单元,用于获取所述目标拨叉向第一挡位移动过程中开始移动时的第一电流值,以及获取所述目标拨叉向第二挡位移动过程中开始移动时的第二电流值;
35.若干拨叉位置传感器,分别设置在各个拨叉上,用于获取相应的目标拨叉向第一挡位移动过程中到达第一同步点时目标拨叉的第一占空比、到达第一极限点时目标拨叉的第二占空比;以及获取相应的目标拨叉向第二挡位移动过程中到达第二同步点时目标拨叉的第三占空比、到达第二极限点时目标拨叉的第四占空比;
36.计算单元,用于根据所述第一电流值和所述第二电流值计算所述目标拨叉对应的电磁阀中位电流;
37.根据所述第一占空比和所述第三占空比计算所述目标拨叉的空挡位置;
38.根据所述第二占空比计算所述目标拨叉在所述第一挡位的在挡位置;
39.根据所述第四占空比计算所述目标拨叉在所述第二挡位的在挡位置。
40.实施本发明实施例,具有如下有益效果:本发明实施例在下线台架驱动电机和输出电机给定相应转速的条件下,通过控制同步器各挡位拨叉相应的电磁阀电流使拨叉逐步移动至极限位置的过程来识别同步器开始动作的电流及同步完成点和极限位置点的状态,最终计算得出同步器的中位电流及空挡位置和在挡位置,该方法可以为零部件制造尺寸存在差异的每台变速器,给出在整车控制中更为合理的控制参数,从而使得车辆具有最优的换挡控制性能和驾驶性。
附图说明
41.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
42.图1为本发明实施例一一种自动变速器同步器特性点自学习方法的流程示意图。
43.图2为本发明实施例一种自动变速器同步器特性点自学习方法示意图。
44.图3为本发明实施例一一种自动变速器同步器特性点自学习控制逻辑图。
具体实施方式
45.以下各实施例的说明是参考附图,用以示例本发明可以用以实施的特定实施例。
46.请参照图1所示,本发明实施例一提供一种自动变速器同步器特性点自学习方法,具体是在下线台架上对自动变速器进行测试,得到自动变速器同步器特性点,自学习方法包括:
47.步骤s1,在自动变速器所有挡位均处于空位置情况下,控制驱动电机和输出电机分别在预设的第一转速和第二转速下运转。
48.具体地,事先确保所有挡位及离合器处于空位置,即控制所有拨叉对应的电磁阀电流为默认中位电流,通常在500ma~560ma之间,例如可以设置为530ma。设置下线台架的驱动电机和输出电机全部为转速控制模式,并预先设置两个电机的转速。可以设置驱动电机的转速为1500rpm,输出电机的转速根据待测目标挡位进行设定,可以设置输出电机的转速=目标转速/待测目标挡位的速比,其中,目标转速可以设置为2500rpm。
49.步骤s2,控制目标拨叉对应的电磁阀电流从默认中位电流逐渐增大,获取所述目标拨叉向第一挡位移动过程中开始移动时的第一电流值、到达第一同步点时所述目标拨叉的第一占空比、到达第一极限点并稳定后所述目标拨叉的第二占空比;
50.以及,控制所述目标拨叉对应的电磁阀电流从默认中位电流逐渐减小,获取所述目标拨叉向第二挡位移动过程中开始移动时的第二电流值、到达第二同步点时所述目标拨叉的第三占空比、到达第二极限点并稳定后所述目标拨叉的第四占空比。
51.具体的测试场景如图2所示,以测试拨叉挂1挡以及挂5挡的特性为例进行说明。其中,空挡时,拨叉位于输入轴上1挡和5挡位置之间的某处位置o,拨叉对应的电磁阀电流为默认中位电流,大概在500ma~560ma之间,控制电磁阀电流缓慢增大,例如以0.125ma/10ms的速率增大,当电磁阀电流逐渐增大至i1时,拨叉开始向右移动,控制拨叉继续缓慢移动,当拨叉移动至位置a时,5挡离合器转速达到目标转速2500rpm时,表明拨叉到达了5挡同步点,读取拨叉的位置传感器的第一占空比,需要说明的是,位置传感器反馈的占空比表示拨叉当前位置处于拨叉整个行程的百分比,第一占空比dr1=fa/fc。继续增大电磁阀电流,使拨叉移动到5挡极限位置c,具体可以以较快的速率增大电流值,将电流值增大至最大值,当拨叉的位置传感器的占空比不再变化时表明拨叉已达到5挡极限位置c,然后撤掉电磁阀电流,即将电磁阀电流切换至默认中位电流,在撤力的情况下,拨叉会从极限位置c向内反弹至稳定位置b,待反弹结束后,读取拨叉稳定后的第二占空比,第二占空比dr2=fb/fc。
52.同理,空挡情况下,控制电磁阀电流缓慢减小,例如以0.125ma/10ms的速率减小,当电磁阀电流逐渐减小至i2时,拨叉从位置o开始向左移动,控制拨叉继续缓慢移动,当拨叉移动至位置d时,1挡离合器转速达到目标转速2500rpm时,表明拨叉到达了1挡同步点,读取拨叉的位置传感器的第三占空比,第三占空比dr3=fd/fc。继续减小电磁阀电流,使拨叉移动到1挡极限位置f,具体可以以较快的速率减小电流值,将电流值减小至最小值(极限为0),当拨叉的位置传感器的占空比不再变化时表明拨叉已达到1挡极限位置f,然后恢复电磁阀电流,将电磁阀电流切换至默认中位电流,在撤力的情况下,拨叉会从极限位置f向内反弹至稳定位置e,待反弹结束后,读取拨叉稳定后的第四占空比,第四占空比dr4=fe/fc。
53.步骤s3,根据所述第一电流值和所述第二电流值计算所述目标拨叉对应的电磁阀中位电流;
54.根据所述第一占空比和所述第三占空比计算所述目标拨叉的空挡位置;
55.根据所述第二占空比计算所述目标拨叉在所述第一挡位的在挡位置;
56.根据所述第四占空比计算所述目标拨叉在所述第二挡位的在挡位置。
57.具体地,拨叉各同步特性参数计算如下:
58.拨叉对应的电磁阀中位电流i=(i1+i2)/2,即取拨叉在两个方向开始动作所对应的电流值的平均值;
59.拨叉的空挡位置s0=(dr1+dr3)
×
l/2=(fa+fd)/2,即取拨叉在两个方向的同步点位置的中间位置;
60.拨叉在5挡位的在挡位置s1=dr2×
l=fb,即取拨叉在5挡极限位置反弹并稳定后的位置;
61.拨叉在1挡位的在挡位置s2=dr4×
l=fe,即取拨叉在1挡极限位置反弹并稳定后的位置;
62.其中,i1、i2分别为第一电流值和第二电流值,dr1、dr2、dr3、dr4分别为第一占空比、第二占空比、第三占空比和第四占空比,l为拨叉在轴上的行程。
63.步骤s4,重复步骤s1-s3,完成所有挡位拨叉的特性点自学习。
64.本发明实施例提供了一种具体的自动变速器同步器特性点自学习控制逻辑,如图3所示。
65.本发明实施例在量产下线台架上对同步器的中间位置电流和控制系统的关键参
量进行学习,具体是在下线台架驱动电机和输出电机给定相应转速的条件下,通过控制同步器各挡位拨叉相应的电磁阀电流使拨叉逐步移动至极限位置的过程来识别同步器开始动作的电流及同步完成点和极限位置点的状态,最终计算得出同步器的中位电流及空挡位置和在挡位置,该方法可以为零部件制造尺寸存在差异的每台变速器,给出在整车控制中更为合理的控制参数,从而使得车辆具有最优的换挡控制性能和驾驶性。
66.相应于本发明实施例一提供的自动变速器同步器特性点自学习方法,本发明实施例二还提供一种自动变速器同步器特性点自学习系统,包括:
67.电流控制单元,用于控制目标拨叉对应的电磁阀电流从默认中位电流逐渐增大或逐渐减小;
68.电流获取单元,用于获取所述目标拨叉向第一挡位移动过程中开始移动时的第一电流值,以及获取所述目标拨叉向第二挡位移动过程中开始移动时的第二电流值;
69.若干拨叉位置传感器,分别设置在各个拨叉上,用于获取相应的目标拨叉向第一挡位移动过程中到达第一同步点时目标拨叉的第一占空比、到达第一极限点时目标拨叉的第二占空比;以及获取相应的目标拨叉向第二挡位移动过程中到达第二同步点时目标拨叉的第三占空比、到达第二极限点时目标拨叉的第四占空比;
70.计算单元,用于根据所述第一电流值和所述第二电流值计算所述目标拨叉对应的电磁阀中位电流;
71.根据所述第一占空比和所述第三占空比计算所述目标拨叉的空挡位置;
72.根据所述第二占空比计算所述目标拨叉在所述第一挡位的在挡位置;
73.根据所述第四占空比计算所述目标拨叉在所述第二挡位的在挡位置。
74.有关本实施例自动变速器同步器特性点自学习系统的工作原理和过程,参见前述本发明实施例一的说明,此处不再赘述。
75.通过上述说明可知,与现有技术相比,本发明的有益效果在于:本发明实施例在量产下线台架上对同步器的中间位置电流和控制系统的关键参量进行学习,具体是在下线台架驱动电机和输出电机给定相应转速的条件下,通过控制同步器各挡位拨叉相应的电磁阀电流使拨叉逐步移动至极限位置的过程来识别同步器开始动作的电流及同步完成点和极限位置点的状态,最终计算得出同步器的中位电流及空挡位置和在挡位置,该方法可以为零部件制造尺寸存在差异的每台变速器,给出在整车控制中更为合理的控制参数,从而使得车辆具有最优的换挡控制性能和驾驶性。
76.以上所揭露的仅为本发明较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1