球伞弧锥自动变速器的制作方法
1.本发明涉及齿轮传动技术领域,具体涉及球伞弧锥自动变速器。
背景技术:
2.现有机械自动变速器包括两大类:一种是有级的,通过自动控制系统的自动控制实现自动变速的目的,比如amt、at、dct等;第二种是无级自动变速则cvt。两种自动变速器都需配置复杂的自动控制系统和机械传动系统,有级自动变速历史更久,应用最多,但比起cvt来在运行平顺度和能耗上都显不足。
3.在自动变速领域,无级自动变速无疑将代表未来。现在的cvt技术主要来自日本,其技术难点主要是传动皮带的设计制造和两个传动轮的变径控制。现在的cvt几嫀完美,但仍存在以下缺点:第一、需要一个复杂的自动控制系统控制两个传动轮的变径运动,没能做到仅依靠机械运动来实现两个传动轮的变径运动——则“纯机械自动化”。第二、传动带构造复杂——提高了设计制造和维修难度;双向摩擦——增加耗能和发热;有一定的转弯半径要求——使两个传动轮的变径幅度受到限制,直接导致现有的cvt的速比度严重受限。一般只有5
‑
6倍,按现有的公开资料最大的也仅有8.7倍。速比度是最大变速倍数与最小变速倍数之比,速比度越大说明变速范围越广、性能越佳;现在的cvt在高速时(一般超过100km/h)耗油大,速比度不能做大是其中最重要的原因。第三、三个方向的外型尺寸都比较大,对前后加装固定变速组、与发动机一起在机舱内的布置等造成困扰。
4.因此,继续一种新的变速器来解决上述的问题。
技术实现要素:
5.本发明的目的在于针对现有技术中的不足,而提供一种球伞弧锥自动变速器,采用该变速器能够解决以往传递结构复杂的问题。
6.本发明的目的通过以下技术方案实现:
7.提供一种球伞弧锥自动变速器,包括至少一个弧锥齿轮组件和至少一个与弧锥齿轮组件间隔设置的球伞齿轮组件;球伞齿轮组件包括主动轴和可转动的旋转盘,旋转盘固接在主动轴的一端,旋转盘设有多个沿旋转盘周向排布的齿合臂,各个齿合臂均通过铰接件与旋转盘铰接,旋转盘转动时带动齿合臂绕铰接件作圆周运动;弧锥齿轮组件包括可转动的锥台和从动轴,从动轴与锥台的底面固接,锥台的母线为弧线,弧线与齿合臂作圆周运动的轨迹相匹配,锥台的外周侧面设有多圈与齿合臂啮合的第一咬合齿;多圈第一咬合齿沿所述锥台的高度方向从上至下依次排布在所述锥台的外周侧面,各个圈第一咬合齿的齿数或齿间间距均不同。
8.其中,球伞齿轮组件设有两个,弧锥齿轮组件设有一个,弧锥齿轮组件位于两个球伞齿轮组件之间,各个球伞齿轮组件的齿合臂均与弧锥齿轮组件的锥台的第一咬合齿啮合;球伞齿轮组件的主轴轴由主动齿轮组进行驱动。
9.其中,球伞齿轮组件设有一个,弧锥齿轮组件设有两个,两个弧锥齿轮组件位于球
伞齿轮组件的两侧,在运动状态下,球伞齿轮组件的齿合臂均与各个弧锥齿轮组件的锥台的第一咬合齿啮合。
10.其中,球伞齿轮组件设有一个,弧锥齿轮组件设有多个,多个弧锥齿轮组件沿旋转盘的周向排布在球伞齿轮组件的外周侧,在运动状态下,球伞齿轮组件的齿合臂均与各个弧锥齿轮组件的锥台的第一咬合齿啮合
11.其中,球伞齿轮组件设有多个,弧锥齿轮组件设有一个,多个球伞齿轮组件沿锥台的周向均布在弧锥齿轮组件的外周侧,在运动状态下,各个球伞齿轮组件的齿合臂均与弧锥齿轮组件的锥台的第一咬合齿啮合
12.其中,旋转盘朝向锥台的端面竖直延伸出多个沿旋转盘周向间隔排布的第一隔板,相邻的第一隔板之间形成用于容置一个齿合臂端部插入的第一凹槽。
13.其中,各个第一隔板朝向锥台的端面均开设有第一轴环槽,各个齿合臂朝向旋转盘的端部均开设有铰接孔;球伞齿轮组件还包括半球形支架,半球形支架中部开设有通孔,半球形支架的外周侧面开设有多个沿旋转盘周向间隔排布的轨道槽,各个轨道槽均对应与一个第一凹槽连通,半球形支架与旋转盘固接,主动轴穿过通孔,各个齿合臂对应插入一个轨道槽中;球伞齿轮组件还包括至少两个轴环,半球形支架朝向旋转盘的端面开设有供多个第一隔板插入的轴配型槽,轴配型槽的槽底开设有第一圆弧槽,在装配状态下,各个齿合臂通过铰接孔套设在对应的轴环上,各个轴环首尾相接围成第一圆环体,第一圆环体卡持在半球形支架的第一圆弧槽和第一隔板的第一轴环槽之间。
14.其中,球伞齿轮组件包括伞架滑块、弹性件和多个连杆,各个连杆的一端对应与一个齿合臂的中部铰接,各个连杆的另一端与伞架滑块铰接;伞架滑块可滑动地套设在主动轴上,弹性件设置在伞架滑块与旋转盘之间,弹性件驱使伞架滑块朝远离旋转盘的方向运动;伞架滑块的外周侧面朝外延伸出多个沿旋转盘周向间隔排布的第二隔板,相邻的第一隔板之间形成用于容置一个连杆端部插入的第二凹槽;球伞齿轮组件还包括伞架套件和至少两个钢环,伞架套件套设并固定在伞架滑块的外周侧面,伞架套件朝向第二隔板的端面开设有第二圆弧槽,各个第二隔板朝向伞架套件的端面均开设有第二轴环槽,在装配状态下,各个连杆的端部套设在对应的钢环上,各个钢环首尾相接围成第二圆环体,第二圆环体卡持在伞架套件的第二圆弧槽和第二隔板的第二轴环槽之间。
15.其中,各个齿合臂朝向锥台的端部形成有与第一咬合齿啮合的第二咬合齿。
16.本申请的球伞弧锥自动变速器的工作过程为:外部驱动源驱动主动轴转动,主动轴转动带动旋转盘转动,旋转盘转动的同时带动齿合臂绕铰接件作圆周运动,齿合臂由收拢状态转变至撑开状态,齿合臂在撑开的过程中,齿合臂的端部会与锥台外周侧面位于底部的第一咬合齿啮合,从而带动锥台转动,锥台转动从而带动从动轴转动,当齿合臂撑开的角度发生变化时,齿合臂会沿锥台的母线作圆周运动,齿合臂会与锥台外周侧面另外一圈的第一咬合齿啮合,由于第一咬合齿的齿数或齿间间距发生了变化,从而间接导致了主动轴与从动轴之间的传动比发生变化,令从动轴的转速提高或降低,从而达到变速的目的;
17.与现有技术相比,利用旋转盘转动所产生的离心力使齿合臂作圆周运动,从而使球伞齿轮组件转化为可变径的齿轮,实现了与锥台不同的第一咬合齿啮合传动,实现了不同速度的变化,整体结构具有体量更小、能损更低、运行顺畅、速比度大、维护简单等显著优点。
附图说明
18.利用附图对本发明作进一步说明,但附图中的实施例不构成对本发明的任何限制,对于本领域的普通技术人员,在不付出创造性劳动的前提下,还可以根据以下附图获得其它的附图。
19.图1为实施例1中球伞弧锥自动变速器在收拢状态下的剖视图。
20.图2为实施例1中旋转盘和齿合臂的结构示意图。
21.图3为实施例1中锥台的结构示意图。
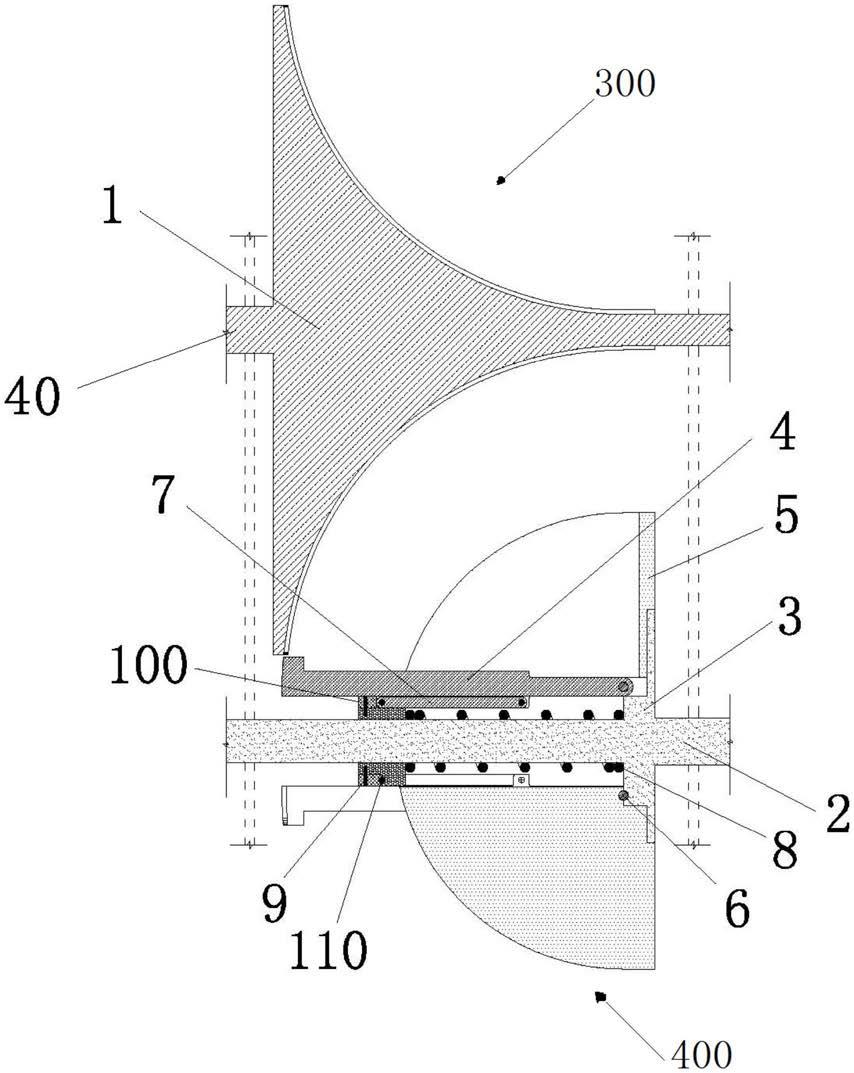
22.图4为实施例1中球伞弧锥自动变速器在撑开状态下的示意图。
23.图5为实施例1中旋转盘的的结构示意图。
24.图6为实施例1中半球形支架的结构示意图。
25.图7为实施例1中轴环的结构示意图。
26.图8为实施例1中球伞齿轮机构的剖视图。
27.图9为实施例1中球伞滑块的结构示意图。
28.图10为实施例1中钢环的结构示意图。
29.图11为实施例1中球伞套件的结构示意图。
30.图12为实施例1中齿合臂的结构示意图。
31.图13为实施例2中球伞弧锥自动变速器的结构示意图。
32.图14为实施例3中球伞弧锥自动变速器的结构示意图。
33.图15为实施例4中球伞弧锥自动变速器的结构示意图。
34.图16为实施例5中球伞弧锥自动变速器的结构示意图。
35.附图标记:锥台1,第一咬合齿11,主动轴2,旋转盘3,第一隔板31,第一轴环槽32,第一凹槽33,齿合臂4,从动轴40,第二咬合齿41,半球形支架5,轴配型槽51,第一圆弧槽52,轨道槽53,轴环6,连杆7,弹性件8,球伞滑块9,第二隔板91,第二轴环槽92,第二凹槽93,球伞套件100,第二圆弧槽101,钢环110,弧锥齿轮组件300,球伞齿轮组件400。
具体实施方式
36.结合以下实施例对本发明作进一步描述。
37.实施例1
38.本发明的一种球伞弧锥自动变速器的具体实施方式之一,请见图1至图4,包括一个弧锥齿轮组件和与弧锥齿轮组件间隔设置的一个球伞齿轮组件,本实施例以应用在变速器中为例进行说明,弧锥齿轮组件和球伞齿轮组件为相对且错位地设置。
39.在本实施例中,球伞齿轮组件包括可转动的旋转盘3,在实际应用中,旋转盘3可以直接与主动电机的输出轴进行固接。结合图2,旋转盘3设有多个沿旋转盘3周向排布的齿合臂4,各个齿合臂4均通过铰接件与旋转盘3铰接,旋转盘3转动时,齿合臂4的末端会产生离心力,离心力带动齿合臂4绕铰接件作圆周运动,其原理等于游乐场中的空中飞椅的运动原理。齿合臂4在外部动力源驱动主动轴2转动的离心力带动下会越快张得越大,齿合臂4的张开角度随主动轴2转动由慢到最快也将在0度与90度之间进行变化。
40.在本实施例中,弧锥齿轮组件包括从动轴40和可转动的锥台1,从动轴40与锥台1的底面固接,锥台1的母线为弧线,即锥台1的外周侧面为一个向内凹陷的湖面。弧线与齿合
臂4作圆周运动的轨迹相匹配,即弧线为齿合臂4圆周运动的轨迹。由于本实施例以变速机构为例进行说明,结合图3,锥台1的外周侧面沿锥台1的高度方向从上至下依次设有多圈第一咬合齿11,各个圈第一咬合齿11的齿数或齿间间距均不同,齿合臂4作圆周运动,齿合臂4张开的角度不同,齿合臂4会与锥台1上不同圈组的第一咬合齿11所啮合,从而实现调节传动比,从而根据齿合臂4张开角度的不同来调节锥台1自身的转速,实现锥台1的无极变速,达到调速的效果。
41.在本实施例中,球伞齿轮组件包括主动轴2,旋转盘3固接在主动轴2的一端,旋转盘3可以与主动轴2为一体结构,这样能够增强主动轴2和旋转盘3的结构强度,也可以通过套接和键槽的方式进行固接。结合图5,旋转盘3朝向锥台1的端面竖直延伸出多个沿旋转盘3周向间隔排布的第一隔板31,相邻的第一隔板31之间形成用于容置一个齿合臂4端部插入的第一凹槽33,当齿合臂4的端部插入到第一凹槽33中,通过铰接件将齿合臂4的端部铰接在第一凹槽33内,从而使齿合臂4能够在第一凹槽33内发生转动。各个第一隔板31朝向锥台1的端面均开设有第一轴环槽32,各个齿合臂4朝向旋转盘3的端部均开设有铰接孔。结合图6,球伞齿轮组件还包括半球形支架5,半球形支架5中部开设有通孔,半球形支架5的外周侧面开设有多个沿旋转盘3周向间隔排布的轨道槽53,各个轨道槽53均对应与一个第一凹槽33连通,半球形支架5与旋转盘3固接,主动轴2穿过通孔,各个齿合臂4对应插入一个轨道槽53中。半球形支架5主要的作用是提高球伞齿轮组件的结构强度,防止齿合臂4在转动过程中断裂,保证运动的稳定性和流畅性。
42.在本实施例中,结合图7,球伞齿轮组件还包括至少两个轴环6,半球形支架5朝向旋转盘3的端面开设有供多个第一隔板31插入的轴配型槽51,轴配型槽51的槽底开设有第一圆弧槽52,在装配状态下,各个齿合臂4通过铰接孔套设在对应的轴环6上,各个轴环6首尾相接围成第一圆环体,第一圆环体卡持在半球形支架5的第一圆弧槽52和第一隔板31的第一轴环槽32之间。半球形支架5是一个复杂的半球加工件,其作用是作为球伞齿轮组件的支座:其一是作为伞型机构的固定架,其二是固定每一条齿合臂4的张开轨道、消除齿合臂4因受弯和受扭而破坏的可能。
43.为了使齿合臂4能够自动收拢,结合图8,球伞齿轮组件还包括伞架滑块、弹性件8和多个连杆7,各个连杆7的一端对应与一个齿合臂4的中部铰接,各个连杆7的另一端与伞架滑块铰接。伞架滑块可滑动地套设在主动轴2上,弹性件8设置在伞架滑块与旋转盘3之间,弹性件8驱使伞架滑块朝远离旋转盘3的方向运动。在本实施例中,弹性件8为弹簧,随着齿合臂4张开的角度增大,弹簧受到的压力也随之增大,作用到弹簧上的压缩力也会随之增大,弹簧所提供的反作用力也随之增大,当主动轴2的转速减慢时,作用到齿合臂4上的离心力小于弹簧的反作用力,弹簧则会驱使齿合臂4从撑开状态转化为收拢状态,从而实现齿合臂4的自动收拢。弹簧的加入可以大幅提高主动轴2的最高转动速度限制,不至于主动轴2稍微提高速度齿合臂4就已张到接近90度。以设定的主动轴2最高转动速度,当转速逐渐升到最高转速时,齿合臂4张开角度刚好贴近90度。依此逻辑关系对具体的球伞机构,可以通过计算进行预选并最终以实验数据为依据确定弹簧的弹性系数和弹簧的尺寸。在从动轴40反力和主动轴驱动力的相互作用下,主动轴转速会不断变化,齿合臂4的张开角也跟随自动变化,变速倍数也自动变化。在整个过程中变速倍数变化是连续不间断的,并且期间无需变速控制系统的加持,是正真意义上的纯机械自动化。
44.在本实施例中,结合图9,伞架滑块的外周侧面朝外延伸出多个沿旋转盘3周向间隔排布的第二隔板91,相邻的第一隔板31之间形成用于容置一个连杆7端部插入的第二凹槽93。结合图10和图11,球伞齿轮组件还包括伞架套件和至少两个钢环110,伞架套件套设并固定在伞架滑块的外周侧面,伞架套件朝向第二隔板91的端面开设有第二圆弧槽101,各个第二隔板91朝向伞架套件的端面均开设有第二轴环槽92,在装配状态下,各个连杆7的端部套设在对应的钢环110上,各个钢环110首尾相接围成第二圆环体,第二圆环体卡持在伞架套件的第二圆弧槽101和第二隔板91的第二轴环槽92之间。
45.在本实施例中,结合图12,各个齿合臂4朝向锥台1的端部形成有与第一咬合齿11啮合的第二咬合齿41。
46.本实施例的球伞弧锥自动变速器的工作过程为:外部电机带动主动轴2进行旋转,主动轴2旋转会带动旋转盘3转动,旋转盘3转动的同时,离心力会带动齿合臂4绕轴环6作圆周运动,即齿合臂4由收拢状态转变为撑开状态,齿合臂4在撑开的过程中,齿合臂4的端部会与锥台1外周侧面上的第一咬合齿11啮合,从而带动锥台1转动,实现类齿轮传动结构。
47.在齿合臂4撑开的过程中,齿合臂4通过连杆7从而带动伞架滑块沿主动轴2朝压缩弹性件8的方向进行滑动,从而压缩弹性件8,弹性件8处于压缩状态并提供一个反作用力抵消齿合臂4作用到伞架滑块上的拉力,当弹簧的反作用力等于伞架滑块滑动的拉力,锥台1以匀速状态进行运转;当弹簧的反作用力大于伞架滑块滑动的拉力,齿合臂4会朝收拢状态进行收拢,齿合臂4会与锥台1上不同第一咬合齿11进行啮合,从而使锥台1的转速减慢;当弹簧的反作用力小于伞架滑块滑动的拉力,齿合臂4会不断地撑开,直至达到最大撑开角度,齿合臂4不断撑开的过程中,锥台1的转速会不断提高,从而达到无极变速的效果。
48.与现有技术相比,利用旋转盘3转动所产生的离心力使齿合臂4作圆周运动,从而使球伞齿轮组件转化为可变径的齿轮,实现了与锥台1的啮合传动,具有体量更小、能损更低、运行顺畅、速比度大、维护简单等显著优点,在从动轴40反力和主动轴驱动力的相互作用下,原理不断变化,从而实现无级变速的目的。与cvt比较中间皮带的消失,使由皮带造成的瑕疵也不复存在,其中包括:构造复杂已不存在、双向摩擦已不存在、有一定的转弯半径要求已不存在。本实施例的变速器没有皮带的束缚,球伞和弧锥的变径度都比较大,直接导致速比度轻松做到50倍以上,实现同性能变速器体量的有效缩小。
49.实施例2
50.本申请的一种球伞弧锥自动变速器的具体实施方式之二,参见图13所示的球伞弧锥自动变速器的结构示意图,本实施例的主要技术方案与实施例1相同,在本实施例中未解释的特征,采用实施例1中的解释,在此不再进行赘述。本实施例与实施例1的区别在于:球伞齿轮组件设有两个,弧锥齿轮组件设有一个,弧锥齿轮组件位于两个球伞齿轮组件之间,各个球伞齿轮组件的齿合臂均与弧锥齿轮组件的锥台的第一咬合齿啮合。球伞齿轮组件的主轴轴由主动齿轮组进行驱动。通过采用两个球伞齿轮组件驱动一个弧锥齿轮组件,能够使弧锥齿轮组件工作更加稳定,使弧锥齿轮组件获得的动力更大,更平稳。
51.实施例3
52.本申请的一种球伞弧锥自动变速器的具体实施方式之三,参见图14所示的球伞弧锥自动变速器的结构示意图,本实施例的主要技术方案与实施例1相同,在本实施例中未解释的特征,采用实施例1中的解释,在此不再进行赘述。本实施例与实施例1的区别在于:球
伞齿轮组件设有一个,弧锥齿轮组件设有两个,两个弧锥齿轮组件位于球伞齿轮组件的两侧,在运动状态下,球伞齿轮组件的齿合臂均与各个弧锥齿轮组件的锥台的第一咬合齿啮合。这种结构适用于需要双输出轴的情况,仅采用一个球伞齿轮组件就能够为两个弧锥齿轮组件同时提供动力,使两个弧锥齿轮组件的工作得到同步,保证双工作端的同步性和稳定性。
53.实施例4
54.本申请的一种球伞弧锥自动变速器的具体实施方式之四,参见图15所示的球伞弧锥自动变速器的结构示意图,本实施例的主要技术方案与实施例1相同,在本实施例中未解释的特征,采用实施例1中的解释,在此不再进行赘述。本实施例与实施例1的区别在于:球伞齿轮组件设有一个,弧锥齿轮组件设有多个,多个弧锥齿轮组件沿旋转盘的周向排布在球伞齿轮组件的外周侧,在运动状态下,球伞齿轮组件的齿合臂均与各个弧锥齿轮组件的锥台的第一咬合齿啮合。这种结构适用于需要多输出轴的情况,仅采用一个球伞齿轮组件就能够为多个弧锥齿轮组件同时提供动力,使多个弧锥齿轮组件得同步运行,保证多个工作端的同步性和稳定性。
55.实施例5
56.本申请的一种球伞弧锥自动变速器的具体实施方式之五,参见图16所示的球伞弧锥自动变速器的结构示意图,本实施例的主要技术方案与实施例1相同,在本实施例中未解释的特征,采用实施例1中的解释,在此不再进行赘述。本实施例与实施例1的区别在于:球伞齿轮组件设有多个,弧锥齿轮组件设有一个,多个球伞齿轮组件沿锥台的周向均布在弧锥齿轮组件的外周侧,在运动状态下,各个球伞齿轮组件的齿合臂均与弧锥齿轮组件的锥台的第一咬合齿啮合。通过采用多个球伞齿轮组件驱动一个弧锥齿轮组件,能够使弧锥齿轮组件工作更加稳定,使弧锥齿轮组件获得的动力更大,更平稳。
57.最后应当说明的是,以上实施例仅用以说明本发明的技术方案,而非对本发明保护范围的限制,尽管参照较佳实施例对本发明作了详细地说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的实质和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1