离合器扭矩的控制方法与流程
1.本发明涉及双离合变速器的扭矩控制技术领域,特别涉及一种离合器扭矩的控制方 法。
背景技术:
2.双离合器变速器是一种机、电、液系统共同作用的复杂系统。搭载双离合器变速器 的汽车,在起步过程中,需要实时计算精确的离合器控制扭矩,以使离合器的扭矩能与 发动机的转速保持同步。
3.当发动机的转速出现顶点时,这时发动机的转速加速度为0,惯性扭矩为0,此时离 合器扭矩刚好可以传递当前的发动机扭矩。但是,此时离合器的最终目标扭矩、发动机 的实际扭矩差距较大,如果按该离合器的目标扭矩继续对离合器加压会造成发动机转速 下拉。这会使得车辆在起步过程中因发动机转速波动而产生明显的顿挫感。即使是有pid 调节的介入,也仍避免不了发动机转速波动的问题。
4.因此,现有的双离合器变速器在起步过程中需要离合器扭矩自适应控制以提高控制 其稳定性。
技术实现要素:
5.本发明的目的在于解决现有技术中双离合器变速器在起步过程中平顺性较差的问题。
6.为解决上述问题,本发明的实施方式公开了一种离合器扭矩的控制方法,用于对双 离合变速箱系统在起步过程中的闭环转速控制阶段的离合器扭矩进行控制;双离合变速 箱系统包括发动机、变速器、以及离合器,离合器设置在发动机和变速器之间;并且, 离合器扭矩的控制方法包括以下步骤:
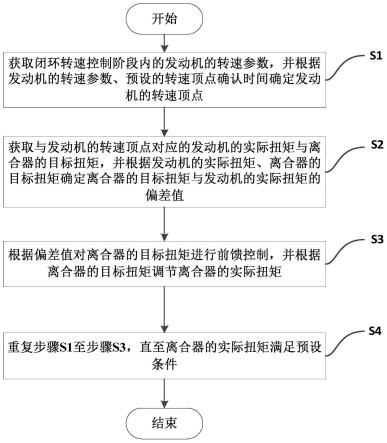
7.s1:获取闭环转速控制阶段内的发动机的转速参数,并根据发动机的转速参数、预 设的转速顶点确认时间确定发动机的转速顶点;
8.s2:获取与发动机的转速顶点对应的发动机的实际扭矩与离合器的目标扭矩,并根 据发动机的实际扭矩、离合器的目标扭矩确定离合器的目标扭矩与发动机的实际扭矩的 偏差值;
9.s3:根据偏差值对离合器的目标扭矩进行前馈控制,并根据离合器的目标扭矩调节 离合器的实际扭矩;
10.s4:重复步骤s1至步骤s3,直至满足预设条件。
11.采用上述方案,利用离合器的目标扭矩与发动机的实际扭矩确定前馈控制的偏差值, 并利用该偏差值不断调整下一次前馈控制过程中的离合器的目标扭矩,能够使得发动机 的扭矩和转速在不发生大幅波动的前提下快速地使离合器的扭矩与发动机的扭矩相匹配, 提高了双离合器变速器在起步过程中的平顺性。
12.根据本发明的另一具体实施方式,本发明实施方式公开的离合器扭矩的控制方
法, 发动机的转速参数包括发动机的实际转速;并且,步骤s1包括:
13.s11:获取发动机的实际转速的最大值;
14.s12:判断发动机的实际转速是否为实际转速的最大值且持续的时长大于或等于转速 顶点确认时间;
15.若是,则将转速顶点确认时间前一时刻的发动机的实际转速作为发动机的转速顶点;
16.若否,则继续执行步骤s11。
17.采用上述方案,通过将转速顶点确认时间前一时刻的发动机的实际转速作为发动机 的转速顶点这样的方式,确定出的发动机的转速顶点不会受到发动机转速的变化率的影 响。由此,确定出的发动机的转速顶点更准确。
18.根据本发明的另一具体实施方式,本发明实施方式公开的离合器扭矩的控制方法, 步骤s1之前,还包括:获取离合器的扭矩参数、发动机的扭矩参数、发动机的启动参数, 并判断离合器的扭矩参数、发动机的扭矩参数、发动机的启动参数是否均满足预设的转 速顶点确定条件;
19.若是,则执行步骤s1;
20.若否,则继续判断离合器的扭矩参数、发动机的扭矩参数、发动机的启动参数是否 均满足预设的转速顶点确定条件。
21.采用上述方案,通过设置转速顶点确定条件,将预设的转速顶点确定条件进行存储, 并在条件满足时直接获取发动机的转速最大值,不会错过获取转速顶点的时机,能提高 扭矩调节的效率。
22.根据本发明的另一具体实施方式,本发明实施方式公开的离合器扭矩的控制方法, 离合器的扭矩参数包括离合器的目标扭矩;发动机的扭矩参数包括发动机的目标扭矩、 发动机的实际扭矩;发动机的启动参数包括发动机的启动时间;并且,预设的转速顶点 确定条件包括:离合器的目标扭矩在一段时间内单调递增或变化率为0;发动机的实际扭 矩与发动机的目标扭矩的差值的范围为0至10%;发动机的目标扭矩大于预设的扭矩阈 值,其中,预设的扭矩阈值的范围为50n
·
m至60n
·
m;发动机的启动时间大于100 秒;并且,上述条件需同时满足。
23.采用上述方案,在确定发动机的转速顶点时,综合考虑了发动机的启动时间、离合 器的目标扭矩、发动机的目标扭矩、发动机的实际扭矩等的影响,使得确定出的转速顶 点更准确。
24.根据本发明的另一具体实施方式,本发明实施方式公开的离合器扭矩的控制方法, 双离合变速箱系统还包括控制装置;并且,步骤s2包括:
25.s21:获取双离合变速箱系统的控制装置的运行周期;
26.s22:根据控制装置的运行周期、以及转速顶点确认时间,以先入先出的方式确定出 预设时间段内的多组发动机的实际扭矩、离合器的目标扭矩;其中
27.预设时间段的时长大于或等于转速顶点确认时间的时长,且预设时间段的终点与转 速顶点确认时间的终点相同;
28.s23:将转速顶点确认时间前一时刻对应的发动机的实际扭矩、离合器的目标扭矩的 差值作为偏差值。
29.采用上述方案,在确定偏差值时,考虑了控制装置的运行周期,避免了发动机的转 速顶点的数据并未存储在控制装置中,无法确定转速顶点的问题。并且,根据控制装置 的运行周期、以及转速顶点确认时间确定出预设时间段内的多组发动机的实际扭矩、离 合器的目标扭矩,无需在控制装置中存储大量数据,提高了运算效率。
30.根据本发明的另一具体实施方式,本发明实施方式公开的离合器扭矩的控制方法, 步骤s23还包括:获取流经离合器的油液温度,并根据油液温度、转速顶点确认时间确 定偏差确认时间;获取偏差确认时间对应的发动机的实际扭矩、离合器的目标扭矩,并 将偏差确认时间对应的发动机的实际扭矩、离合器的目标扭矩的差值作为偏差值。
31.采用上述方案,通过根据油液温度在转速顶点确认时间的基础上再延时一定的时间, 得到偏差确认时间,并将偏差确认时间对应的发动机的实际扭矩、离合器的目标扭矩的 差值即为离合器与发动机的扭矩不匹配的量,提高确定出的偏差值的准确性。
32.根据本发明的另一具体实施方式,本发明实施方式公开的离合器扭矩的控制方法, 步骤s3还包括:
33.s3’:获取发动机的控制参数,并根据控制参数、以及发动机的转速参数对离合器的 目标扭矩进行反馈控制;其中,发动机的控制参数包括发动机的目标转速、发动机的目 标扭矩。
34.采用上述方案,在前馈控制的同时增加反馈控制,能使离合器的目标扭矩能快速达 到控制目标。
35.根据本发明的另一具体实施方式,本发明实施方式公开的离合器扭矩的控制方法, 发动机的转速参数包括发动机的实际转速;发动机的控制参数还包括发动机的转动惯量、 发动机的目标转速的变化率;并且,根据以下公式调节离合器的目标扭矩:
[0036][0037]
其中,tc为离合器的最终目标扭矩,te为发动机的目标扭矩,je为发动机的转动惯量,为发动机的目标转速的变化率,ωe为发动机的实际转速,ω
t
为发动机的目标转速, pid(ω
t
,ωe)为关于发动机的实际转速、发动机的目标转速的pid控制结果,adaofst为偏 差值。
[0038]
根据本发明的另一具体实施方式,本发明实施方式公开的离合器扭矩的控制方法, 步骤s4包括:重复步骤s1至步骤s3,并将每次前馈控制的偏差值根据流经离合器的油 液温度、以及发动机的实际扭矩进行分类存储;根据当前的流经离合器的油液温度、以 及对发动机的实际扭矩确定出本次前馈控制的偏差值,并根据本次前馈控制的偏差值对 下一次前馈控制过程中的离合器的目标扭矩进行前馈控制,直至满足预设条件。
[0039]
采用上述方案,车辆在下一次起步时,能直接调用对应于不同油温和离合器扭矩的 偏差值,提高了扭矩调节的效率。
[0040]
根据本发明的另一具体实施方式,本发明实施方式公开的离合器扭矩的控制方法, 预设的转速顶点确认时间的范围为50毫秒至60毫秒;并且,预设条件包括:发动机的 目标扭矩与发动机的实际扭矩偏差较小。
[0041]
本发明的有益效果是:
[0042]
本方案利用离合器的目标扭矩与发动机的实际扭矩确定前馈控制的偏差值,并利用 该偏差值不断调整下一次前馈控制过程中得到的离合器的目标扭矩,能够使得发动机
施例提供的离合器扭矩的控制方法包括以下步骤:
[0054]
s1:获取闭环转速控制阶段内的发动机的转速参数,并根据发动机的转速参数、预 设的转速顶点确认时间确定发动机的转速顶点;
[0055]
s2:获取与发动机的转速顶点对应的发动机的实际扭矩与离合器的目标扭矩,并根 据发动机的实际扭矩、离合器的目标扭矩确定离合器的目标扭矩与发动机的实际扭矩的 偏差值;
[0056]
s3:根据偏差值对离合器的目标扭矩进行前馈控制,并根据离合器的目标扭矩调节 离合器的实际扭矩;
[0057]
s4:重复步骤s1至步骤s3,直至满足预设条件。
[0058]
采用上述方案,利用离合器的目标扭矩与发动机的实际扭矩确定前馈控制的偏差值, 并利用该偏差值不断调整下一次前馈控制过程中得到的离合器的目标扭矩,能够使得发 动机的扭矩和转速在不发生大幅波动的前提下快速地使离合器的扭矩与发动机的扭矩相 匹配,提高了双离合器变速器在起步过程中的平顺性。
[0059]
接下来,参考图1-4对本实施例提供的离合器扭矩的控制方法进行描述。
[0060]
在描述离合器扭矩的控制方法涉及的具体步骤之前,先对双离合变速箱系统进行说 明。参考图2,双离合变速箱系统包括发动机、变速器、以及离合器,离合器设置在发动 机和变速器之间。离合器能够切断或接通发动机与变速箱之间的扭矩传递。本实施例中 的双离合变速箱系统与现有技术中的双离合变速箱系统没有本质区别,本实施例不再赘 述。
[0061]
需要说明的是,本实施例提供的离合器扭矩的控制方法用于对双离合变速箱系统在 起步过程中的闭环转速控制阶段的离合器扭矩进行控制。参考图3,图3示出了双离合变 速箱系统的起步过程的参数曲线图。该图3中包含有5条曲线,曲线3-1表示发动机的 实际转速;曲线3-2表示离合器的输入轴转速;曲线3-3表示发动机的实际扭矩;图3-4 表示离合器的目标扭矩;曲线3-5表示离合器的实际扭矩。其中,曲线3-1、3-2表示转 速,其纵坐标的单位为转/分钟。曲线3-3、3-4、3-5均表示扭矩,其纵坐标的单位为牛
·
米。 双离合变速箱系统的起步过程主要分为4个阶段。
[0062]
第一阶段,即图3中的开环控制阶段(lash)。在此阶段下,离合器的扭矩以开环控 制的方式向发动机的目标扭矩过渡。
[0063]
第二阶段,即图3中的闭环转速控制阶段(synchro)。当发动机的转速与离合器的 目标输出轴转速接近时,开始进入闭环转速控制阶段。
[0064]
第三阶段,即图3中的平滑控制阶段(smooth)。当发动机的转速与离合器的目标轴 转速接近时,进入smooth控制,双离合变速箱平顺结合离合器。
[0065]
第四阶段,即图3中的恢复阶段(reinst)。在此阶段下,离合器完全结合,汽车退 出低速控制。
[0066]
以下为离合器扭矩的控制方法的具体步骤。
[0067]
首先,执行步骤s1,获取闭环转速控制阶段内的发动机的转速参数,并根据发动机 的转速参数、预设的转速顶点确认时间确定发动机的转速顶点。
[0068]
需要说明的是,发动机的转速参数包括发动机的实际转速。发动机的实际转速可以 用转速传感器实时测量得到。
[0069]
具体地,步骤s1包括以下步骤:
[0070]
s11:获取发动机的实际转速的最大值;
[0071]
s12:判断发动机的实际转速是否为实际转速的最大值且持续的时长大于或等于转速 顶点确认时间;
[0072]
若是,则将转速顶点确认时间前一时刻的发动机的实际转速作为发动机的转速顶点;
[0073]
若否,则继续执行步骤s11。
[0074]
也就是说,本实施例中,参考图4,转速传感器会实时测量发动机的实际转速,并将 实际转速的相关信息发送至双离合变速箱系统的控制装置(transmission control unit, tcu),控制装置会实时地将当前时刻的发动机转速与前一时刻的发动机转速进行比较, 并找出最大的发动机转速,即发动机的实际转速的最大值。之后,控制装置会继续接收 发动机的实际转速的相关信息,如果发动机的转速持续在实际转速最大值一定时间,则 说明该段时间之前的发动机转速值即为发动机的转速顶点。
[0075]
具体地,本实施例中,预设的转速顶点确认时间的范围为50毫秒至60毫秒。
[0076]
需要说明的是,由于发动机在起步过程中转速的变化率变化较剧烈,本实施例中采 用将转速顶点确认时间前一时刻的发动机的实际转速作为发动机的转速顶点这样的方式, 确定出的发动机的转速顶点不会受到发动机转速的变化率的影响。由此,确定出的发动 机的转速顶点更准确。
[0077]
当然,本领域技术人员还可以选择其他方式确定发动机的转速顶点。例如,当发动 机的转速的加速度不大于某一加速度值,或者图3中曲线3-1的斜率不大于某一斜率值 时,则说明达到了发动机的转速顶点。
[0078]
优选地,本实施例中,在步骤s1之前,还包括:获取离合器的扭矩参数、发动机的 扭矩参数、发动机的启动参数,并判断离合器的扭矩参数、发动机的扭矩参数、发动机 的启动参数是否均满足预设的转速顶点确定条件;
[0079]
若是,则执行步骤s1;
[0080]
若否,则继续判断离合器的扭矩参数、发动机的扭矩参数、发动机的启动参数是否 均满足预设的转速顶点确定条件。
[0081]
也就是说,由于发动机在起步的过程中,发动机的转速也会有波动,在确定发动机 的转速顶点的时候,可能会出现控制装置为了获得一个转速的最大值,持续较长时间获 取发动机的转速的数据,当发动机转速下降时错过了发动机的转速顶点的问题。因此, 本实施例为快速、准确地确定转速顶点,设定了转速顶点确定条件。通过将预设的转速 顶点确定条件存储在控制装置中,控制装置在条件满足时直接获取发动机的转速最大值, 不会错过获取转速顶点的时机,能提高扭矩调节的效率。
[0082]
具体地,离合器的扭矩参数包括离合器的目标扭矩;发动机的扭矩参数包括发动机 的目标扭矩、发动机的实际扭矩;发动机的启动参数包括发动机的启动时间。
[0083]
其中,离合器的目标扭矩可以通过公式进行计算。具体计算公式如下:
[0084][0085]
其中,tc为离合器的最终目标扭矩,te为发动机的目标扭矩,je为发动机的转动惯量,为发动机的目标转速的变化率,ωe为发动机的实际转速,ω
t
为发动机的目标转速, pid(ω
t
,ωe)为关于发动机的目标转速、发动机的实际转速的pid控制结果。
[0086]
pid控制,也即比例-积分-微分控制,其可以参考现有技术,本实施例不再赘述。
[0087]
需要解释的是,上述离合器目标扭矩的计算公式是当次反馈调节过程中,离合器的 最终目标扭矩,但离合器的实时目标扭矩与发动机的扭矩存在一定的扭矩差。本发明也 正是基于消除上述扭矩差提出的。扭矩差的确定方法会在后续内容中说明。
[0088]
发动机的目标扭矩即为发动机在运行时所需要达到的目标扭矩,可以通过与发动机 控制器的实时通讯如can获取,本实施例不再赘述。
[0089]
发动机的实际转矩、以及发动机的启动时间均可以通过can通讯得到。
[0090]
更具体地,预设的转速顶点确定条件包括:离合器的目标扭矩在一段时间内单调递 增或变化率为0;发动机的实际扭矩与发动机的目标扭矩的差值的范围为0至10%;发 动机的目标扭矩大于预设的扭矩阈值;发动机的启动时间大于100秒。
[0091]
需要说明的是,预设的扭矩阈值的范围为50n
·
m至60n
·
m;并且,上述条件需 同时满足。
[0092]
接下来,执行步骤s2,获取与发动机的转速顶点对应的发动机的实际扭矩与离合器 的目标扭矩,并根据发动机的实际扭矩、离合器的目标扭矩确定离合器的目标扭矩与发 动机的实际扭矩的偏差值。
[0093]
具体地,步骤s2包括:
[0094]
s21:获取双离合变速箱系统的控制装置的运行周期;
[0095]
s22:根据控制装置的运行周期、以及转速顶点确认时间,以先入先出的方式确定出 预设时间段内的多组发动机的实际扭矩、离合器的目标扭矩;其中
[0096]
预设时间段的时长大于或等于转速顶点确认时间的时长,且预设时间段的终点与转 速顶点确认时间的终点相同;
[0097]
s23:将转速顶点确认时间前一时刻对应的发动机的实际扭矩、离合器的目标扭矩的 差值作为偏差值。
[0098]
本实施例中,控制装置的运行周期可以参考产品说明书等。
[0099]
以控制装置的运行周期为10毫秒、转速顶点确认时间为50毫秒为例进行说明。由 于控制装置运行5个周期之后,才能达到一个转速顶点确认时间的时长。而本方案中, 是将控制装置确认的发动机的转速顶点的时机,往前推算转速顶点确认时间,并将转速 顶点确认时间之前的发动机的转速作为转速顶点。如果控制装置的运行周期较小,且控 制装置中并未存储前几个运行周期采集到的数据,那么就会发生控制装置确认出发动机 的转速顶点,往前推算转速顶点确认时间后,发动机的转速顶点的数据并未存储在控制 装置中。因此,需要根据控制装置的运行周期、以及转速顶点确认时间,将多组发动机 的实际扭矩、离合器的目标扭矩存储在控制装置中。并且,控制装置中一般不会存储很 多组数据,否则会造成存储量大、运算缓慢的问题。本实施例中以先入先出的方式将数 据存储在控制装置中。
[0100]
进一步地,步骤s23还包括:获取流经离合器的油液温度,并根据油液温度、转速 顶点确认时间确定偏差确认时间;获取偏差确认时间对应的发动机的实际扭矩、离合器 的目标扭矩,并将偏差确认时间对应的发动机的实际扭矩、离合器的目标扭矩的差值作 为偏差值。
[0101]
需要说明的是,油液温度可以通过温度传感器实时测量得到。
[0102]
由于离合器传递的实际扭矩会受到离合器的油液温度的影响,油温越低、离合器扭 矩的特性会越延迟。为了提高确定出的偏差值的准确性,本实施例中,会根据油液温度 在转速顶点确认时间的基础上再延时一定的时间,得到偏差确认时间。偏差确认时间对 应的发动机的实际扭矩、离合器的目标扭矩的差值即为离合器与发动机的扭矩不匹配的 量。
[0103]
之后,执行步骤s3,根据偏差值对离合器的目标扭矩进行前馈控制,并根据离合器 的目标扭矩调节离合器的实际扭矩。
[0104]
需要说明的是,步骤s3还包括以下步骤:
[0105]
s3’:获取发动机的控制参数,并根据控制参数、以及发动机的转速参数对离合器的 目标扭矩进行反馈控制。
[0106]
也就是说,为了使离合器的目标扭矩能快速达到控制目标,本实施例中还会对离合 器的目标扭矩进行反馈控制。反馈控制的具体过程可以参考现有技术中对离合器的目标 扭矩进行反馈控制的方法,本实施例不再赘述。
[0107]
需要说明的是,本实施例中,发动机的控制参数包括发动机的目标转速、发动机的 目标扭矩。发动机的转速参数包括发动机的实际转速;发动机的控制参数还包括发动机 的转动惯量、发动机的目标转速的变化率。
[0108]
其中,发动机的目标转速、发动机的目标扭矩、发动机的实际转速的确定方法在前 述内容中已有描述,在此不再重复。
[0109]
发动机的转动惯量可以通过测量计算得到,具体可以参考现有技术中确定发动机的 转动惯量的方法。发动机的目标转速的变化率可以根据发动机的目标转速计算得到。
[0110]
还需要说明的是,本实施例中,根据以下公式调节离合器的目标扭矩:
[0111][0112]
其中,tc为离合器的最终目标扭矩,te为发动机的目标扭矩,je为发动机的转动惯量,为发动机的目标转速的变化率,ωe为发动机的实际转速,ω
t
为发动机的目标转速,pid(ω
t
,ωe)为关于发动机的目标转速为关于发动机的实际转速、发动机的目标转速的 pid控制结果,adaofst为偏差值。
[0113]
之后,执行步骤s4,重复步骤s1至步骤s3,直至满足预设条件。
[0114]
具体地,步骤s4包括:重复步骤s1至步骤s3,并将每次前馈控制的偏差值根据流 经离合器的油液温度、以及发动机的实际扭矩进行分类存储;根据当前的流经离合器的 油液温度、以及对发动机的实际扭矩确定出本次前馈控制的偏差值,并根据本次前馈控 制的偏差值对下一次前馈控制过程中的离合器的目标扭矩进行前馈控制,直至离合器的 实际扭矩满足预设条件。
[0115]
也就是说,本实施例中,为了使得下次车辆起步时,能够快速调用对应于不同油温 和发动机实际扭矩的偏差值进行前馈调节,可以将每次前馈调节得到的偏差值都存储在 带电可擦可编程只读存储器(electrically erasable programmable read-only memory, eeprom)中,并在下一次起步时,直接调用对应于不同油温和离合器扭矩的偏差值,提 高了扭矩调节的效率。
[0116]
需要说明的是,预设条件包括发动机的目标扭矩与发动机的实际扭矩的差值小于或 等于预设值。其中,本领域技术人员可以根据实际需要设置预设值的大小,本实施例对 其数值不做具体限定。
[0117]
在本发明的另一具体实施方式中,离合器扭矩的控制方法包括以下内容。
[0118]
首先确认发动机的转速顶点。发动机的转速顶点的确认方法不唯一,可以用发动机 的转速的加速度值不大于一定值来确认,也可使用发动机的转速的最大值不变并持续一 定时间来确定。因发动机的转速变化率变化较剧烈,最大值方法比较稳定。具体来说, 控制装置(tcu)实时计算发动机的实际转速的最大值。若发动机转速的最大值无变化 并持续一段时间(转速顶点确认时间),则认为该转速顶点确认时间前的发动机的实际转 速即为发动机的转速顶点。而为避免找到错误的发动机的转速顶点,找发动机的转速顶 点要满足以下条件:离合器的目标扭矩一定处在为单调上升或不减过程;发动机的实际 扭矩与目标扭矩差值较小;发动机的目标扭矩要大于一定值;发动机的启动大于一定时 间,扭矩状态已稳定。
[0119]
接下来,进行离合器的目标扭矩与发动机的实际扭矩的偏差值确定的操作。具体地, 控制装置(tcu)会存储一组若干周期先入先出(first input first output,fifo)的离合 器目标扭矩与发动机的实际扭矩的偏差值。通过控制装置(tcu)存储的fifo的扭矩差, 也即偏差值,找到转速顶点确认时间前一时刻的偏差值即为离合器的目标扭矩与发动机 的实际扭矩的偏差值。若考虑离合器实际传扭的滞后特性,可根据离合器的油温再额外 延迟一定时间,找到的fifo的扭矩差才是当前状态的扭矩的偏差值。
[0120]
之后,进行自适应值的存储。具体来说,可按发动机扭矩大小和离合器油温分组, 将不同发动机扭矩和不同油温下的偏差值存储在相应的只读存储器(eeprom),待下一 次起步时,离合器就会按不同扭矩和油温选取合适的偏差值作为前馈,自动适应发动机 的扭矩,提高起步平顺性。
[0121]
本方案找到发动机的转速顶点后,与控制装置内部存储的离合器的扭矩曲线对比, 并自动优化控制装置内部的扭矩曲线形状。这个扭矩曲线的形状是根据找到发动机的转 速顶点时的发动机是实际扭矩的曲线与控制装置内部存储的离合器的扭矩曲线的差值决 定的。并且在下一次起步控制时直接调用自适应后的离合器的扭矩,达到自动修正控制 装置内部的离合器的扭矩曲线的目的。
[0122]
如图3所示,曲线3-4为曲线3-5的最终目标。找到发动机的转速顶点时,曲线3-4 与曲线3-5的差距较大,说明离合器的目标扭矩是偏深的,如果按这个目标继续加离合 器压力会造成发动机转速下拉,即使有pid配合,最后的效果也不会太好,所以要激活 自适应,使离合器的目标扭矩的曲线,即曲线3-4在该扭矩段减掉曲线3-4与曲线3-5之 间的差值,使得在本次控制中出现阶跃变化,以防止发动机转速下拉。并且,在下一次 起步时,会直接调用自适应后的离合器的目标扭矩曲线,并根据离合器的目标扭矩不断 调整离合器的实际扭矩。使离合器的实际扭矩能与发动机的实际扭矩更好的匹配。
[0123]
虽然通过参照本发明的某些优选实施方式,已经对本发明进行了图示和描述,但本 领域的普通技术人员应该明白,以上内容是结合具体的实施方式对本发明所作的进一步 详细说明,不能认定本发明的具体实施只局限于这些说明。本领域技术人员可以在形式 上和细节上对其作各种改变,包括做出若干简单推演或替换,而不偏离本发明的精神和 范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1