一种单边输入、输出的无级变速器及其变速方法与流程
1.本发明涉及无级变速器技术领域,特别是一种单边输入、输出的无级变速器及其变速方法。
背景技术:
2.随着社会对环保的要求越来越高,电动车技术成了各大车企的主流研究方向。目前电动车多采用固定速比的减速器,虽然可以选用大速比的减速器来满足车辆起步爬坡时候的动力需求,但是大速比限制车辆无法达到较高的最大车速,这也是市场上电动车最高车速普遍低于燃油车最高车速的原因。为了兼顾车辆的最高车速和爬坡能力,很多车企已经开始在电动车上安装amt变速器,但是amt变速器从原理上属于有级变速,先天存在换挡顿挫,有动力中断的问题;amt变速器的传动比范围受制于挡位设置,应用在重型车上面,为了扩大传动比范围,需要设置非常多的挡位,换挡过程慢,操作复杂,导致很多大车司机不愿意踩刹车;amt变速器换挡过程依赖复杂的控制策略,很难把握准确的换挡时机,存在能耗高、效率低的问题;amt变速器的结构复杂,制造成本高,维修困难。
技术实现要素:
3.本发明的目的是为了解决上述问题,设计了一种单边输入、输出的无级变速器及其变速方法。
4.实现上述目的本发明的技术方案为,一种单边输入、输出的无级变速器,包括第一行星排、第二行星排和单向止动器,所述第一行星排上设置有第一太阳轮、第一行星架和第一齿圈,所述第二行星排上设置有第二太阳轮、第二行星架和第二齿圈,所述第一齿圈与所述第二行星架连接,所述第一行星架与所述第二齿圈连接,所述第一行星排的一侧通过第一输入轴连接着第一驱动件,所述第二行星排的同一侧通过第二输入轴连接着第二驱动件,所述第二驱动件安装在所述第一驱动件的一侧,所述第一行星排设置于所述第一驱动件的另一侧,所述第一齿圈和第二行星架的连接体上设置有单向止动器,所述第一行星架的一侧连接着输出部件。
5.作为对本发明的进一步说明,所述第一输入轴呈空心管状,所述第一输入轴的一端与所述第一驱动件连接,另一端穿过输出部件与所述第一太阳轮连接;所述第二输入轴的一端与第二驱动件连接,另一端穿过第一驱动件、第一输入轴和第一太阳轮与所述第二太阳轮连接。
6.作为对本发明的进一步说明,所述第一太阳轮上啮合有第一行星轮,所述第一行星轮安装在所述第一行星架上,所述第一行星轮与所述第一齿圈啮合,所述第一齿圈的内壁上设置有第一内齿。
7.作为对本发明的进一步说明,所述第二太阳轮上啮合有第二行星轮,所述第二行星轮安装在所述第二行星架上,所述第二行星轮与所述第二齿圈啮合,所述第二齿圈的内壁上设置有第一内齿。
8.作为对本发明的进一步说明,所述单向止动器用于限制所述第一齿圈和第二行星架的转动方向;所述单向止动器使所述第一齿圈和第二行星架的转动方向仅与所述第一驱动件的转向一致。
9.本发明还提供了一种基于单边输入、输出的无级变速器的变速方法,第一驱动件和第一太阳轮通过第一输入轴进行连接,使所述第一驱动件的转速和所述第一太阳轮的转速相同;第二驱动件和第二太阳轮通过第二输入轴进行连接,使所述第二驱动件的转速和所述第二太阳轮的转速相同;第一齿圈和第二行星架的转速相同;第一行星架、第二齿圈和输出部件的转速均相同;通过调节控制所述第一驱动件的转速和所述第二驱动件的转速,实现所述输出部件的转速的无级连续变化,在此过程,速比也会相应发生变化。
10.作为对本发明的进一步说明,变速方法根据车辆不同工况进行不同方式的变速,具体包括:
11.状态a:当车辆起步时,所述第一驱动件和所述第二驱动件同时工作,并且转速方向相反;其中所述第一驱动件为正向转动,所述第二驱动件为反向转动;可根据实际需要通过控制所述第一驱动件和所述第二驱动件的转速轻松完成维持、过渡、切换,整个过程是连贯平顺的,没有动力中断;
12.状态b:当车辆加速行驶时,所述第一驱动件和所述第二驱动件同时加速,当所述第一驱动件转速即将超出高效区时,停止增加所述第一驱动件的转速,并且降低所述第二驱动件的转速,所述第二驱动件由反转逐渐降低到转速为0,然后所述第二驱动件的转速开始与所述第一驱动件的转速同向;当车辆到达最高车速时,所述第一驱动件和所述第二驱动件的转向相同,所述第一驱动件和第二驱动件都达到最高转速;
13.根据当下的工况,分别对所述第一驱动件和所述第二驱动件进行加速、减速或维持转速的设定,使所述第一驱动件和所述第二驱动件都能够长时间工作在各自的高效区域,从而实现节能的效果;
14.状态c:倒车时,所述第一驱动件的转速为反向,所述第二驱动件的转速为正向。
15.作为对本发明的进一步说明,所述状态a中所述第一驱动件的转速为n1,故所述第一太阳轮的转速为n1,所述第一齿圈有反向旋转的趋势,此时单向止动器起作用,限制所述第一齿圈反向旋转,所述第一齿圈的转速为n3=0,所述第一行星架的转速为n2,所述输出部件的转速等于所述第一行星架的转速为n2,在这个过程中,所述第一太阳轮输入,所述第一齿圈固定,所述第一行星架减速増扭输出;
16.所述第二驱动件带动所述第二太阳轮转动,所述第二太阳轮的转速方向为反向,所述第二行星架有反转的趋势,且所述第二行星架与所述第一齿圈连接,其中单向止动器限制所述第二行星架反向旋转,所述第二行星架的转速为n3=0,所述第二齿圈的转速为n2,所述第二太阳轮的转速通过矢量图计算得出为n4,使所述第二驱动件的转速为n4,在这个过程中,所述第二太阳轮输入,所述第二行星架固定,所述第二齿圈减速増扭输出;
17.所述第一驱动件的动力通过所述第一行星架输出,所述第二驱动件的动力通过所述第二齿圈输出,所述第一驱动件和所述第二驱动件的动力耦合在一起输出,并且所述第一行星排和所述第二行星排的工作原理都是减速増扭的过程,故输出的扭矩也会增加。
18.作为对本发明的进一步说明,所述状态b中所述第一太阳轮的转速n1增加,所述第一行星架的转速n2增加,所述第二驱动件的转速增加,所述第二太阳轮的转速n4增加,所述
第二齿圈的转速n2增加;故所述输出部件的转速也会增加;
19.当所述第一驱动件的转速即将超出高效区时,停止增加所述第一驱动件的转速,并且降低所述第二驱动件的转速,所述第二驱动件由反转逐渐降低到转速为0,所述第二太阳轮的转速n4降低到0,因为单向止动器仅限制所述第一齿圈和第二行星架不能反转,而不限制所述第一齿圈和第二行星架正向加速,故所述第二齿圈的转速n2继续增加,所述输出部件的转速也会继续增加,所述第二行星架开始正转,转速为n3;
20.所述第二驱动件开始正转,当所述第二驱动件的转速与所述第一驱动件的转速相同时,此时所述第一太阳轮的转速等于所述第二太阳轮的转速,即n1=n4,所述第一齿圈的转速等于所述第一行星架的转速,即n3=n2,所述第二齿圈的转速等于所述第二行星架的转速,故n1=n3=n2=n4,并且与所述输出部件的转速相同。
21.作为对本发明的进一步说明,所述状态c中所述第一驱动件的转速为n1,转向为反向,第二驱动件的转速为n4,转向为正向,所述第一齿圈有正向旋转的趋势,此时单向止动器起作用,限制所述第一齿圈正向旋转,所述第一齿圈的转速为n3=0,所述第一行星架的转速为n2,所述输出部件的转速等于所述第一行星架的转速为n2,在这个过程中,所述第一太阳轮输入,所述第一齿圈固定,所述第一行星架减速増扭输出;
22.所述第二驱动件带动所述第二太阳轮转动,所述第二太阳轮的转速方向为正向,所述第二行星架有正转的趋势,且所述第二行星架与所述第一齿圈连接,其中单向止动器限制所述第二行星架正向旋转,所述第二行星架的转速为n3=0,所述第二齿圈的转速为n2,所述第二太阳轮的转速通过矢量图计算得出为n4,使所述第二驱动件的转速为n4,在这个过程中,所述第二太阳轮输入,所述第二行星架固定,所述第二齿圈减速増扭输出;
23.所述第一驱动件的动力通过所述第一行星架输出,所述第二驱动件的动力通过所述第二齿圈输出,所述第一驱动件和所述第二驱动件的动力耦合在一起输出,并且所述第一行星排和所述第二行星排的工作原理都是减速増扭的过程,故输出的扭矩也会增加。
24.本发明提供的单边输入、输出的无级变速器及其变速方法,在第一太阳轮和第二太阳轮的同一侧都设置有驱动件,并对驱动件的转速和转向进行调整,通过第一行星排、第二行星排和单向止动器之间的配合实现输出部件无级变速,该机构具有传动效率高、输出扭矩大、无动力中断、结构简单可靠、制造成本低、维修容易及调速简单方便等优点,另外,将第一驱动件、第二驱动件和输出部件设置于本无级变速机构的同一侧,使动力的输入和输出都在无级变速机构的一端,且第二输入轴是穿过第一输入轴和第一驱动件与第二驱动件连接的,这样的设计可以极大的提升空间的利用率,使整个动力设备在排布和空间利用率上更加合理。
附图说明
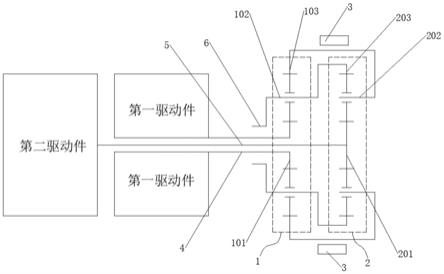
25.图1是本发明实施例提供的单边输入、输出的无级变速器的结构示意图;
26.图2是本发明实施例提供的第一行星排的转速矢量图;
27.图3是本发明实施例提供的第二行星排的转速矢量图;
28.图4是本发明实施例提供的将图1和图2合并的第一行星排和第二行星排的转速矢量图;
29.图5是起步工况1下本发明实施例提供的转速矢量图;
30.图6是起步工况2下本发明实施例提供的转速矢量图;
31.图7是起步工况第一驱动件和第二驱动件的转速控制不准确或者控制失效情况下本发明实施例提供的转速矢量图;
32.图8是加减速工况1下本发明实施例提供的转速矢量图;
33.图9是加减速工况2下本发明实施例提供的转速矢量图;
34.图10是倒车工况下本发明实施例提供的转速矢量图;
35.图11是第一驱动件失效、第二驱动件单独工作情况下本发明实施例提供的转速矢量图;
36.图12是第二驱动件失效、第一驱动件单独工作情况下本发明实施例提供的转速矢量图;
37.图13是第一驱动件、第二驱动件和输出部件在起步和加速的过程中本发明实施例提供的转速曲线图。
38.附图标记:
[0039]1‑
第一行星排,101
‑
第一太阳轮,102
‑
第一行星架,103
‑
第一齿圈,2
‑
第二行星排,201
‑
第二太阳轮,202
‑
第二行星架,203
‑
第二齿圈,3
‑
单向止动器,4
‑
第一输入轴,5
‑
第二输入轴,6
‑
输出部件。
具体实施方式
[0040]
首先我们先要说明我们申报本发明的目的,我们是为了解决amt变速器先天存在换挡顿挫,有动力中断的问题;amt变速器的传动比范围受制于挡位设置,应用在重型车上面,为了扩大传动比范围,需要设置非常多的挡位,换挡过程慢,操作复杂,导致很多大车司机不愿意踩刹车的原因;amt变速器换挡过程依赖复杂的控制策略,很难把握准确的换挡时机,存在能耗高、效率低的问题;amt变速器的结构复杂,制造成本高,维修困难等现有问题,故提出了一种单边输入、输出的无级变速器来解决现有存在的问题。
[0041]
下面结合附图对本发明进行具体描述,我们先来介绍一下本发明的具体结构,如图1所示,一种单边输入、输出的无级变速器,包括第一行星排1、第二行星排2和单向止动器3,第一行星排1上设置有第一太阳轮101、第一行星架102和第一齿圈103,第二行星排2上设置有第二太阳轮201、第二行星架202和第二齿圈203,第一齿圈103与第二行星架202连接,第一行星架102与第二齿圈203连接,第一行星排1的一侧通过第一输入轴4连接着第一驱动件,第二驱动件安装在第一驱动件的一侧,第一行星排设置于第一驱动件的另一侧,第二行星排2的同一侧通过第二输入轴5连接着第二驱动件,第一齿圈103和第二行星架202的连接体上设置有单向止动器3,第一行星架102的一侧连接着输出部件6。
[0042]
参见图1,所述第一输入轴4的一端与所述第一驱动件连接,另一端穿过输出部件6与所述第一太阳轮101连接;所述第二输入轴5的一端与第二驱动件连接,另一端穿过第一驱动件、第一输入轴4和第一太阳轮101与所述第二太阳轮201连接。
[0043]
参见图1,第一太阳轮101上啮合有第一行星轮,第一行星轮安装在第一行星架102上,第一行星轮与第一齿圈103啮合,第一齿圈103的内壁上设置有第一内齿。
[0044]
参见图1,第二太阳轮201上啮合有第二行星轮,第二行星轮安装在第二行星架202上,第二行星轮与第二齿圈203啮合,第二齿圈203的内壁上设置有第二内齿。
[0045]
参见图1,单向止动器3用于限制第一齿圈103和第二行星架202的转动方向;单向止动器3使第一齿圈103和第二行星架202的转动方向仅与第一驱动件的转向一致。
[0046]
下面我们需要结合本发明的具体结构说明一种基于单边输入、输出的无级变速器的变速方法。
[0047]
根据行星齿轮的基本原理,太阳轮、齿圈和行星架三个构件,任意其中两个构件的转速确定,另外一个构件的转速也是确定的,并且他们的转速关系根据太阳轮齿数和齿圈齿数成相应的比例关系。
[0048]
根据行星齿轮的基本原理,太阳轮、齿圈和行星架三个构件,任其中意两个构件的转速相同,另外一个构件的转速也是相同的。
[0049]
参见图1,第一驱动件的转速和第一太阳轮101的转速相同;第二驱动件的转速和第二太阳轮201的转速相同;第一齿圈103的转速和第二行星架202的转速相同;第一行星架102的转速、第二齿圈203的转速和输出部件6的转速均相同。
[0050]
为了更好地说明本发明通过自身结构所能达到的变速效果,接下来需要对上述的变速方法进行更进一步的阐述。
[0051]
根据行星齿轮的基本原理,太阳轮、齿圈和行星架三个构件,任意两个构件的转速确定的话,另外一个构件的转速也是确定的,并且他们的转速关系根据太阳轮齿数和齿圈齿数成相应的比例关系。
[0052]
根据行星齿轮的基本原理,太阳轮、齿圈和行星架三个构件,任意两个构件的转速相同,另外一个构件的转速也是相同的。
[0053]
设定第一太阳轮101的齿数为z1,第一齿圈103的齿数为z2;第二太阳轮201的齿数为z3,第二齿圈203的齿数为z4。
[0054]
设定第一驱动件的转速和第一太阳轮101转速为n1;
[0055]
设定第二驱动件的转速和第二太阳轮201的转速为n4;
[0056]
设定第一齿圈103的转速和第二行星架202的转速为n3;
[0057]
设定第一行星架102、第二齿圈203和输出部件6的转速均为n2;
[0058]
根据行星齿轮的转速矢量计算方法得到第一行星排1的转速矢量图2,n1是第一太阳轮101的转速,n2是第一行星架102的转速,n3是第一齿圈103的转速。n1、n2、n3的长度代表转速大小,箭头方向代表转速方向,箭头向上代表转速为正。设定l2/l1=(第一太阳轮101齿数z1)/(第一齿圈103齿数z2)。
[0059]
根据行星齿轮的转速矢量计算方法得到第二行星排2的转速矢量图3,n4是第二太阳轮201的转速,n3是第二行星架202的转速,n2是第二齿圈203的转速。n2、n3、n4的长度代表转速大小,箭头方向代表转速方向,箭头向上代表转速为正。设定l2/l3=(第二太阳轮201齿数z3)/(第二齿圈203齿数z4)。
[0060]
将图2和图3合并得图4,n1是第一太阳轮101和第一驱动件的转速;n4是第二太阳轮201和第二驱动件的转速;n2是第一行星架102和第二齿圈203的转速,即输出部件6的转速;n3为第一齿圈103和第二行星架202的转速;由图4可以看出整个机构,第一驱动件的转速n1确定,第二驱动件的转速n4确定,那么输出部件6的转速n2也唯一确定。通过调节控制第一驱动件的转速n1和第二驱动件的转速n4就可以实现输出部件6的转速n2的无级连续变化。
[0061]
起步时,第一驱动件的转速为n1,转向为正向,第二驱动件的转速为n4,转向为反
向。
[0062]
1)起步工况1
[0063]
如图5所示,使第一驱动件的转速n1和第二驱动件的转速n4的比值为[z3×
(z1+z2)]/(z1×
z4),第一齿圈103的转速和第二行星架202的转速n3始终为0,随着第一驱动件的转速n1和第二驱动件的转速n4的逐步增加,输出转速n2逐步增加,转向为正向。
[0064]
2)起步工况2
[0065]
如图6所示,当第一驱动件的转速n1和第二驱动件的转速n4的比值大于[z3×
(z1+z2)]/(z1xz4)时,随着第一驱动件的转速n1和第二驱动件的转速n4的逐步增加,输出转速n2逐步增加,转向为正向,第一齿圈103转速和第二行星架202转速n3逐步增加,转向为正向。
[0066]
起步工况1和起步工况2都是起步过程中的正常工况,采用两种工况的任一工况,或两种工况的切换时间,可根据实际需要通过控制第一驱动件和第二驱动件的转速轻松完成维持、过渡、切换,整个过程是连贯平顺的,没有动力中断。
[0067]
如图7所示,如果第一驱动件和第二驱动件转速控制不准确或者控制失效,当出现第一驱动件的转速n1和第二驱动件的转速n4的比值小于[z3x(z1+z2)]/(z1xz4)时,输出部件6的转速n2可能出现如图6所示的反转情况,车辆会突然倒退,极易发生严重事故,这种工况是不合理的,为了防止这种情况发生,在第一齿圈103和第二行星架202的连接体上设置单向止动器3,限制第一齿圈103和第二行星架202的转速n3的转速方向只能为正向,不能为反向。这样就保证了输出部件6的转速n2的转速方向始终为正向。当第二驱动件的转速n4过快时,只会引起第一驱动件和第二驱动件相互拖拽,不会出现输出转速n2的方向为负的情况。单向止动器3不限制第一齿圈103和第二行星架202的正向旋转,所以起步工况2中的第一齿圈103和第二行星架202的转速n3方向为正的情况是可以出现的,且不会导致第一驱动件和第二驱动件相互拖拽。
[0068]
故起步时,通过控制第一驱动件的转速n1和第二驱动件的转速n4,使第一驱动件的转速n1和第二驱动件的转速n4的比值大于或者等于
[0069]
[z3x(z1+z2)]/(z1xz4)。对于第一行星排1,由第一太阳轮101输入,第一行星架102输出,工作过程是减速増扭的过程;对于第二行星排2,由第二太阳轮201输入,第二齿圈203输出,工作过程也是减速増扭的过程。又因为第一行星架102和第二齿圈203是连接在一起的,所以第一驱动件的动力和第二驱动件的动力通过第一行星排1和第二行星排2耦合在一起,进行减速増扭输出。
[0070]
加速和减速过程按照第二驱动件的转速n4的转向分为两种工况。
[0071]
1)工况1
[0072]
如图8所示,第一驱动件的转速为n1,转向为正向,第二驱动件的转速为n4,转向为反向。控制第一驱动件的转速n1和第二驱动件的转速n4,使第一驱动件的转速n1和第二驱动件的转速n4的比值大于或者等于[z3x(z1+z2)]/(z1×
z4)。通过控制第一驱动件的转速n1和第二驱动件的转速n4的转速大小和增减速快慢程度,就能实现输出部件6的转速n2的逐渐增加或逐渐减小,转向为正向。
[0073]
2)工况2
[0074]
如图9所示,第一驱动件的转速为n1,转向为正向,第二驱动件的转速为n4,转向也为正向。通过控制第一驱动件的转速n1和第二驱动件的转速n4的转速大小和增减速的快慢
程度,就能实现输出转速n2的逐渐增加或减小,转向为正向。在该工况下,第一驱动件的转速n1和第二驱动件的转速n4都达到最大转速的时候,输出转速n2也达到最大值,此时车辆达到最大车速。如果第一驱动件的转速n1和第二驱动件的转速n4的最大值相同,那么输出转速n2所能达到的最大值也相同,此时传动比为1。
[0075]
如图8和图9所示,按上述工况1和工况2进行加速减速时,可以维持第一驱动件的转速n1不变,通过调节第二驱动件的转速n4的大小来调节输出转速n2的大小,也可以维持第二驱动件的转速为n4不变,通过调节第一驱动件的转速为n1的大小来调节输出转速n2的大小。
[0076]
在实现输出部件6的转速n2进行加速或减速的过程中,第一驱动件和第二驱动件可以根据各自的高效区不同,根据当下的工况设定第一驱动件和第二驱动件的加速、减速和维持转速。这样就可以使第一驱动件和第二驱动件都能够长时间工作在各自的高效区域,从而提升节能的效果。
[0077]
如图10所示,倒车时,第一驱动件的转速为n1,转向为反向,第二驱动件的转速为n4,转向为正向。控制第一驱动件的转速n1和第二驱动件的转速n4,使第一驱动件的转速n1和第二驱动件的转速n4的比值大于或者等于[z3x(z1+z2)]/(z1xz4)。通过控制第一驱动件的转速n1和第二驱动件的转速n4的转速大小和增减速快慢程度,就能实现输出转速n2的逐渐增加或减小,转向为反向。如果第一驱动件和第二驱动件的转速控制不准确或者控制失效,防止输出部件6的转速n2出现正转情况,在第一齿圈103和第二行星架202的连接体上的单向止动器3切换为限制第一齿圈103和第二行星架202的转速n3的转速方向只能为反向,不能为正向。
[0078]
除了上述正常工况,还有一种非正常工况需要补充说明,具体如下:
[0079]
如图11所示,当第一驱动件因故障失效,第二驱动件可以继续驱动车辆行驶。第一驱动件失效,第二驱动件的转速为n4,转向为反向,第一齿圈103和第二行星架202有反转的趋势,此时单向止动器3限制其反转,第一齿圈103和第二行星架202的转速n3为0,输出部件6的转速n2为正向转动,第二驱动件的动力通过第二行星排2,以固定传动比(z4/z3)减速増扭输出。
[0080]
如图12所示,当第二驱动件因故障失效,第一驱动件可以继续驱动车辆行驶。第二驱动件失效,第一驱动件的转速为n1,转向为正向,第一齿圈103和第二行星架202有反转的趋势,此时单向止动器3限制其反转,第一齿圈103和第二行星架202的转速n3为0,输出端6的转速n2为正向转动,第一驱动件的动力通过第一行星排1,以固定传动比[(z1+z2)/z1]减速増扭输出。
[0081]
由此可见,当一个驱动件发生故障失效时,另外一个驱动件仍然可以驱动车辆行驶,虽然动力性下降,但是可以依靠一个驱动件将车辆行驶到维修地点或者安全地点,可以大大提高车辆的可靠性。
[0082]
最后,对第一驱动件和第二驱动件在起步和加速的过程进行一个连贯且完整的说明,具体如下:
[0083]
如图13所示,曲线1代表第一驱动件转速随时间变化的曲线,曲线2代表第二驱动件转速随时间变化的曲线,曲线3代表输出转速随时间变化的曲线。在起步阶段,第一驱动件的转速逐渐增加,转向为正向;第二驱动件的转速逐渐增加,转向为反向;输出端的转速
同步增加,转向为正向;此时传动比最大,第一驱动件和第二驱动件都是减速増扭输出,车辆以低速大扭矩起步。在加速阶段,第一驱动件的转速继续加速,到达一定转速后维持转速不变;第二驱动件的转速先反向加速,再降速到0,最后正向加速;输出端的转速始终正向加速,这个过程中传动比逐渐降低,输出端的转速连续无级变化。最高车速阶段,第一驱动件和第二驱动件的转速都达到最高转速,输出部件的转速也达到最高转速,图13展示的是第一驱动件和第二驱动件的最高转速相同的情况,所以输出部件的转速与第一驱动件和第二驱动件的最高转速也相同,传动比为1,车速达到最高。
[0084]
对于其他不同形式的起步和加速应用工况不再一一列举。
[0085]
本发明实施例提供的单边输入、输出的无级变速器及其变速方法,具有如下优点:
[0086]
1、本发明实施例的单边输入、输出的无级变速器,调速过程中无动力中断,并且运行安静平稳,用户在用车时,会有更好的用车体验感,在感官上可以极大地满足客户需求,为本产品的推广和使用奠定了非常好的基础。
[0087]
2、本发明实施例的单边输入、输出的无级变速器可以实现输出部件6从低速到高速均具有大扭矩,通过输出大的扭矩实现车辆在驾驶时,拥有快速加速起步的能力,且大的扭矩在车辆爬坡时可以攀爬更大的坡度,大扭矩也可以满足更多人的用车需求,使本产品的受众面更大。
[0088]
3、本发明实施例的单边输入、输出的无级变速器可以使输入端驱动件可以长时间工作在高效区间内,提高了工作效率,在能源的使用方面可以做到更加节省的效果,在节能方面可以做出更多的贡献。
[0089]
4、本发明实施例的单边输入、输出的无级变速器,具有调速简单方便,只需要控制第一驱动件和第二驱动件的转速就能够实现输出转速的无级连续变化,从而降低了车辆对控制系统的要求,使本产品的推广使用范围更加的宽泛,在一定程度上保证了本产品的推广和普及度。
[0090]
5、本发明实施例的第一驱动件和第二驱动件的动力耦合在一起驱动车辆行驶,当其中一个驱动件发生故障时,另一个驱动件仍然可以继续带动车辆行驶,保证了车主在使用汽车时,即使一个驱动件发生故障,车主还可以依靠另一个驱动件驱动汽车,并及时将汽车开往维修地点,避免了需要叫拖车事件的发生,更好的照顾了车主的用车体验。
[0091]
6、相对于传统单个驱动件的驱动方式,使用本发明实施例的产品不仅可以采用双驱动件进行驱动,而且还可以选取体积更小、转速更低的驱动件相适配,小体积的驱动件更利于驱动件在车体内的排布设计,更方便了后期车体外形的美观设计,并且使用更小的驱动件可以节约成本。
[0092]
7、本发明实施例的单边输入、输出的无级变速器具有高效的传动率,在相同的工况下,可以挑选功率更低和转速更低的电机作为驱动件,相对于大功率的电池,小功率的电池可以更好的预防电池过热情况的发生,通过本发明实施例间接提升了电池的使用安全性。
[0093]
8、本发明实施例的单边输入、输出的无级变速器将第一驱动件、第二驱动件和输出部件设置于本无级变速机构的同一侧,使动力的输入和输出都在无级变速机构的一端,且第一输入轴是穿过第二输入轴和第二驱动件与第一驱动件连接的,这样的设计可以极大的提升空间的利用率,使整个动力设备在排布和空间占用率上更加合理。
[0094]
上述技术方案仅体现了本发明技术方案的优选技术方案,本技术领域的技术人员对其中某些部分所可能做出的一些变动均体现了本发明的原理,属于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1