一种基于电磁辅助式恒力弹簧支架的恒力控制方法
1.本发明属于航天器地面零重力模拟技术领域。
背景技术:
2.近年来我国在科技方面不断取得突破,尤其是在航天领域更是取得了不俗的成绩,航天科研项目发展势头迅猛。2020与2021两年航天领域更是突飞猛进,嫦娥五号、天问火星探测器、空间站等均取得了巨大的成功。随着航天任务难度的上升,如何通过有效的地面测试最大程度地揭示各种扰动因素的影响、以及对此进行验证等技术已成为提高航天器运行可靠性的关键。
3.高保真的地面试验对复杂的大型航天器有很重要的意义,比如对于大型挠性结构的航天器,其挠性特性需在零刚度重力补偿的状态下才能达到尽可能接近在轨的真实运行状态。目前地面测试当中比较成熟的方案最多仅为五自由度,即通过气浮技术实现水平两轴的平动和三轴的转动,第六个自由度即竖直方向的零重力平动一直以来是困扰航天器地面高精度模拟的难题。
技术实现要素:
4.本发明是为了解决目前地面零重力模拟当中,纵向模拟难度大、且模拟精度低的问题,现提供一种基于电磁辅助式恒力弹簧支架的恒力控制方法。
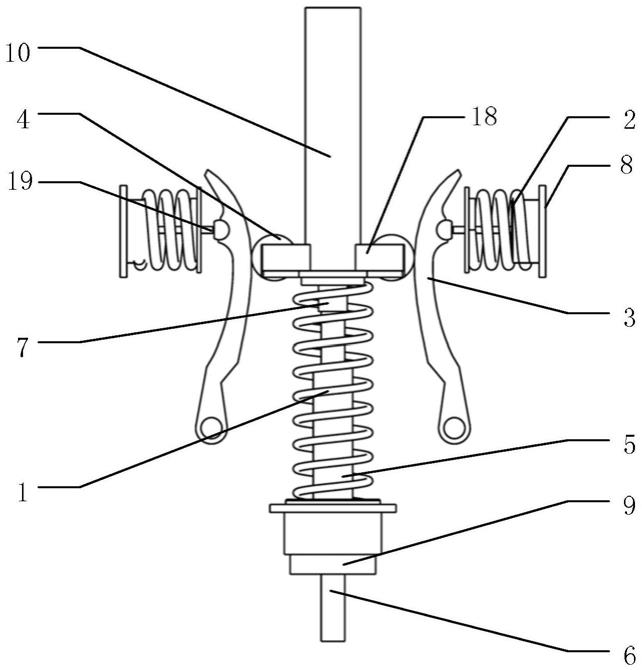
5.一种基于电磁辅助式恒力弹簧支架的恒力控制方法,电磁辅助式恒力弹簧支架包括:恒力弹簧系统和电磁主动式恒力补偿系统,电磁主动式恒力补偿系统包括直线电机5,直线电机5的芯轴6首端与恒力弹簧系统的滚轮支架18下表面相连,直线电机5位于恒力弹簧系统的主弹簧1的内部、且二者轴线重合,直线电机5的末端连接有预紧螺母9,主弹簧1的两端分别与滚轮支架18的下表面和预紧螺母9相接触;
6.所述恒力控制方法包括以下步骤:
7.采集当前时刻滚轮支架18的速度、加速度和位移,并将该速度、加速度和位移输入到训练好的bp神经网络辨识模型中进行辨识,将辨识结果作为当前时刻的辨识输出力,所述位移为滚轮支架18初始位置与当前位置之间的距离,
8.将当前时刻的辨识输出力与当前时刻的目标输出力之差乘以直线电机5的电流系数k
i
,获得第一电流i1,
9.采集直线电机5当前时刻的实际输出力,并对该实际输出力进行pid调节,获得第二电流i2,
10.将第一电流i1与第二电流i2之和输入到直线电机5中,对电磁辅助式恒力弹簧支架进行控制。
11.进一步的,上述电磁主动式恒力补偿系统还包括直线电机输出端力传感器7,直线电机5的芯轴6首端通过直线电机输出端力传感器7与恒力弹簧系统的滚轮支架18下表面相连,直线电机输出端力传感器7用于采集直线电机5的输出力。
12.进一步的,上述bp神经网络辨识模型的训练方法为:
13.调整直线电机5带动恒力弹簧系统的滚轮支架18运动,分别采集n个不同时刻下滚轮支架18的速度v
k
、加速度a
k
和位移y
k
,并作为bp神经网络辨识模型输入层的输入,记为
14.利用bp神经网络辨识模型对进行辨识,获得辨识结果
15.利用下式获得bp神经网络辨识模型的总误差e:
[0016][0017]
其中,为直线电机5不同时刻下测得的实际输出力,
[0018]
利用梯度下降法调整bp神经网络辨识模型的参数,使其总误差e减小,当总误差e达到最小时,完成bp神经网络辨识模型的训练,
[0019]
所述bp神经网络辨识模型的参数包括:输入层神经元节点与隐含层神经元节点之间的连接权值ω
ij
、隐含层神经元节点的阈值θ
j
、隐含层神经元节点与输出层神经元节点之间的连接权值ω
jk
和输出层神经元节点的阈值α
k
。
[0020]
进一步的,上述bp神经网络辨识模型包括输入层、隐含层和输出层,
[0021]
输入层的输入为
[0022]
隐含层的输入和输出分别为:
[0023][0024][0025]
其中,f()为隐含层传递函数,m为输入层的维度,取值为3,
[0026]
输出层的输入和输出分别为:
[0027][0028]
其中,g()为输出层传递函数,p为隐含层的维度,j=1,2,...,p。
[0029]
进一步的,上述恒力弹簧系统包括:主弹簧1、两个辅助弹簧2、两个刀式凸轮3、两个滚轮4和滚轮支架18,
[0030]
两个滚轮4分别架设在滚轮支架18的两端、并能够转动,滚轮支架18上表面设有恒力输出立柱10,两个刀式凸轮3分别位于两个滚轮4的外侧,滚轮4能够在其对应的刀式凸轮3工作面上滚动,
[0031]
刀式凸轮3上设有横杆19,横杆19与直线电机5的芯轴6垂直,两个辅助弹簧2分别套接在两个横杆19上,调节螺母8设置在横杆19的末端,辅助弹簧2的两端分别与调节螺母8和横杆19首端固定连接,
[0032]
恒力输出立柱10与载荷之间通过气浮机构相连。
[0033]
进一步的,上述气浮机构包括:五层支撑板、n个气浮导向杆11和2n个气浮导套12,
n为正整数,
[0034]
五层支撑板由上至下平行层叠设置,第一层支撑板和第二层支撑板之间通过3个载荷力传感器13相连,载荷力传感器13用于采集第一层支撑板和第二层支撑板之间的应力,n个气浮导向杆11的首端与第二层支撑板底面垂直并固定连接,n个气浮导向杆11的末端依次穿过第三、四层支撑板并与第五层支撑板上表面固定连接,每个气浮导向杆11上均套接有两个气浮导套12,同一个气浮导向杆11上的两个气浮导套12分别位于气浮导向杆11与第三、四层支撑板的交界处。
[0035]
进一步的,上述主弹簧1、两个辅助弹簧2、两个刀式凸轮3、两个滚轮4和滚轮支架18均位于第三层支撑板和第四层支撑板之间,主弹簧1、两个辅助弹簧2、两个刀式凸轮3、两个滚轮4和滚轮支架18还位于n个气浮导向杆11的合围区域内,
[0036]
恒力输出立柱10穿过第三层支撑板与第二层支撑板的底面相连。
[0037]
进一步的,上述第一层支撑板的上表面设有用于支撑载荷的支撑立柱16。
[0038]
进一步的,上述电磁辅助式恒力弹簧支架还包括支撑壳体,恒力弹簧系统和电磁主动式恒力补偿系统均位于支撑壳体内部,恒力输出立柱10从支撑壳体的顶部伸出至支撑壳体的外部,两个辅助弹簧2架设在支撑壳体的侧壁上。
[0039]
进一步的,上述支撑壳体包括:两个壳体支撑件14、两个侧面支撑板15、顶板、底板、前面板17和后面板,
[0040]
两个侧面支撑板15、顶板、前面板17和后面板构成下开口的壳体结构,该壳体结构的下开口边缘通过两个壳体支撑件14固定在底板上。
[0041]
本发明所述的一种基于电磁辅助式恒力弹簧支架的恒力控制方法,基于电磁辅助式恒力弹簧支架通过弹簧与凸轮的方式能够实现近似零刚度的力输出。但由于其加工误差、弹簧精度等因素的影响而无法实现精准力的输出,遂采用直线电机与传感器进行主动的力补偿。为实现更高精度的恒力输出,利用bp神经网络建立恒力弹簧支架的输出力辨识模型,通过测量恒力弹簧支架的位置、速度、加速度即可实现对恒力弹簧支架输出力的辨识,并对辨识输出力进行修正。其中bp神经网络能够减少pid的误差范围,提高pid的稳定性,同时pid也能够提高bp神经网络辨识后的控制精度。本发明在提高电磁辅助式恒力弹簧支架的恒力输出精度的同时,还能够实现高精度的竖向重力补偿,提高航天器地面模拟的真实度。
附图说明
[0042]
图1为电磁辅助式气浮恒力弹簧支架主体结构示意图;
[0043]
图2为去掉前面板的电磁辅助式气浮恒力弹簧支架结构示意图;
[0044]
图3为电磁辅助式气浮恒力弹簧支架的整体结构示意图。
[0045]
图4为bp神经网络原理示意图
[0046]
图5为一种基于电磁辅助式恒力弹簧支架的恒力控制方法的原理框图。
[0047]
主弹簧1、辅助弹簧2、刀式凸轮3、滚轮4、直线电机5、芯轴6、直线电机输出端力传感器7、调节螺母8、预紧螺母9、恒力输出立柱10、气浮导向杆11、气浮导套12、载荷力传感器13、壳体支撑件14、侧面支撑板15、支撑立柱16、前面板17、滚轮支架18、横杆19。
具体实施方式
[0048]
具体实施方式一:参照图1至图5具体说明本实施方式,本实施方式所述的一种基于电磁辅助式恒力弹簧支架的恒力控制方法,其中电磁辅助式恒力弹簧支架包括:恒力弹簧系统和电磁主动式恒力补偿系统,电磁主动式恒力补偿系统包括:直线电机5和直线电机输出端力传感器7,直线电机5的芯轴6首端通过直线电机输出端力传感器7与恒力弹簧系统的滚轮支架18下表面相连,直线电机输出端力传感器7用于采集直线电机5的输出力,直线电机5位于恒力弹簧系统的主弹簧1的内部、且二者轴线重合,直线电机5的末端连接有预紧螺母9,主弹簧1的两端分别与滚轮支架18的下表面和预紧螺母9相接触。
[0049]
所述恒力控制方法具体为:
[0050]
首先调整直线电机5带动恒力弹簧系统的滚轮支架18运动,分别采集n个不同时刻下滚轮支架18的速度v
k
、加速度a
k
和位移y
k
,所述位移为滚轮支架18初始位置与当前位置之间的距离。
[0051]
将v
k
、a
k
、y
k
作为bp神经网络辨识模型输入层的输入,记为本实施方式中,由于输入的信息为速度v
k
、加速度a
k
和位移y
k
,即三维数据,因此i=1,2,3。
[0052]
利用bp神经网络辨识模型对进行辨识,获得辨识结果
[0053]
利用下式获得bp神经网络辨识模型的总误差e:
[0054][0055]
其中,为直线电机5不同时刻下测得的实际输出力,
[0056]
利用梯度下降法调整bp神经网络辨识模型的参数,使其总误差e减小,当总误差e达到最小时,完成bp神经网络辨识模型的训练。
[0057]
所述bp神经网络辨识模型的参数包括:输入层神经元节点与隐含层神经元节点之间的连接权值ω
ij
、隐含层神经元节点的阈值θ
j
、隐含层神经元节点与输出层神经元节点之间的连接权值ω
jk
和输出层神经元节点的阈值α
k
。
[0058]
之后,开始对被测时刻当前时刻的状态进行辨识,具体为:
[0059]
采集当前时刻滚轮支架18的速度v、加速度a和位移y,并将v、a、y输入到训练好的bp神经网络辨识模型中进行辨识,将辨识结果作为当前时刻的辨识输出力υ
o
。
[0060]
将υ
o
与当前时刻的目标输出力之差乘以直线电机5的电流系数k
i
,获得第一电流i1。
[0061]
利用直线电机输出端力传感器7采集直线电机5当前时刻的实际输出力,并对该实际输出力进行pid调节,获得第二电流i2。
[0062]
将第一电流i1与第二电流i2之和输入到直线电机5中,对电磁辅助式恒力弹簧支架进行控制,实现直线电机5输出力的补偿。
[0063]
上述bp神经网络辨识模型包括输入层、隐含层和输出层,
[0064]
输入层的输入为
[0065]
隐含层的输入和输出分别为:
[0066][0067][0068]
其中,f()为隐含层传递函数,m为输入层的维度,取值为3,
[0069]
输出层的输入和输出分别为:
[0070][0071]
其中,g()为输出层传递函数,p为隐含层的维度,j=1,2,...,p。
[0072]
本实施方式中,直线电机5内部有磁尺,能够测得当前时刻滚轮支架18的v、a、y并传递给bp神经网络辨识模型,即可辨识出当前电磁辅助式恒力弹簧支架的输出力,这个输出力与目标力的差值即为辨识得到的误差,再乘上直线电机5的电流系数k
i
,即可获得第第一电流i1。由于bp神经网络辨识的结果存在一定误差,则需要利用直线电机输出端力传感器7采集直线电机5当前时刻的实际输出力,这个实际输出力与目标力输出力的差值经过pid模块后,得到第二电流i2。i1与i2相加,即为输入给直线电机5的电流,直线电机5输出作用力给滚轮支架18,对电磁辅助式恒力弹簧支架的误差进行补偿。
[0073]
上述恒力弹簧系统包括:主弹簧1、两个辅助弹簧2、两个刀式凸轮3、两个滚轮4和滚轮支架18。两个滚轮4分别架设在滚轮支架18的两端、并能够转动,滚轮支架18上表面设有恒力输出立柱10,两个刀式凸轮3分别位于两个滚轮4的外侧,滚轮4能够在其对应的刀式凸轮3工作面上滚动,刀式凸轮3上设有横杆19,横杆19与直线电机5的芯轴6垂直,两个辅助弹簧2分别套接在两个横杆19上,调节螺母8设置在横杆19的末端,辅助弹簧2的两端分别与调节螺母8和横杆19首端固定连接,恒力输出立柱10与载荷之间通过气浮机构相连。
[0074]
上述气浮机构包括:五层三角形的支撑板、3个气浮导向杆11和6个气浮导套12。五层支撑板由上至下平行层叠设置,第一层支撑板和第二层支撑板之间通过3个载荷力传感器13相连,载荷力传感器13用于采集第一层支撑板和第二层支撑板之间的应力,3个气浮导向杆11的首端与第二层支撑板底面垂直并固定连接,3个气浮导向杆11的末端依次穿过第三、四层支撑板并与第五层支撑板上表面固定连接,每个气浮导向杆11上均套接有两个气浮导套12,同一个气浮导向杆11上的两个气浮导套12分别位于气浮导向杆11与第三、四层支撑板的交界处。
[0075]
主弹簧1、两个辅助弹簧2、两个刀式凸轮3、两个滚轮4和滚轮支架18均位于第三层支撑板和第四层支撑板之间,主弹簧1、两个辅助弹簧2、两个刀式凸轮3、两个滚轮4和滚轮支架18还位于3个气浮导向杆11的合围区域内,
[0076]
恒力输出立柱10穿过第三层支撑板与第二层支撑板的底面相连。
[0077]
第一层支撑板的上表面设有用于支撑载荷的支撑立柱16。
[0078]
进一步的,上述电磁辅助式气浮恒力弹簧支架还包括支撑壳体,恒力弹簧系统和电磁主动式恒力补偿系统均位于支撑壳体内部,恒力输出立柱10从支撑壳体的顶部伸出至支撑壳体的外部,两个辅助弹簧2架设在支撑壳体的侧壁上。
[0079]
上述支撑壳体包括:两个壳体支撑件14、两个侧面支撑板15、顶板、底板、前面板17
和后面板,两个侧面支撑板15、顶板、前面板17和后面板构成下开口的壳体结构,该壳体结构的下开口边缘通过两个壳体支撑件14固定在底板上。
[0080]
壳体结构位于第三、四层支撑板之间,第三层支撑板坐落在支撑壳体顶部。第四层支撑板坐落在支撑壳体顶部两个壳体支撑件14上。
[0081]
本实施方式中,支撑壳体固定不动,载荷安装在支撑立柱16的顶部。当载荷沿着竖直方向动态运动过程中,两个滚轮4在两个刀式凸轮3的工作面上滚动、并挤压刀式凸轮3,从而改变辅助弹簧2的长度和角度,进一步改变刀式凸轮3对滚轮4的作用力在竖直方向的分量,该力与主弹簧1的力之和始终保持一个定值。
[0082]
载荷力传感器13实时测量载荷竖直方向的受力情况,并反馈给外部控制设备,直线电机5根据控制设备的指令改变输出电流的大小,即改变输出力来补偿机械被动式恒力部分输出的力误差,直线电机输出端力传感器7能够实时反馈直线电机的输出力大小,从而使直线电机输出精准的补偿力。直线电机5和气浮机构共同配合,大大减小机械被动式恒力部分的恒力输出误差,可以使整个系统的输出精度提高一个数量级以上。
[0083]
通过转动预紧螺母9调节主弹簧1下表面的位置,从而改变恒力弹簧系统初始工作时主弹簧1的压缩量,就能够在一定范围内调节恒力输出的力值范围。
[0084]
安装在系统周围的气浮导向杆11、气浮导套12为气浮机构,能够提供一定的径向支撑,消除因载荷的质心偏量引起的翻转力矩,同时也消除因直线电机5输出力作用点偏离中支撑板质心而造成的中支撑板翻转力矩,保证系统的竖直方向运动。并且气浮机构采用气浮的非接触方式,能够大大减小因导向装置引起的摩擦,降低直线电机控制难度,提高零重力模拟精度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1