封闭管道清理机器
1.本发明涉及供水管道清理、供水管道机器人领域,具体涉及一种封闭管道清理机器。
背景技术:
2.随着经济的快速发展,城镇化建设的推进,供水管道作为城市基础建设的重要组成部分,供水管道清洁也越来越重要,发展到今天已经逐步走向了规范化和品牌化,不过其限制行业和准入门槛使之变成已经不是普通人就能简单上手操作的项目了,低端的供水管道清理方式也在逐渐地退出市场,同行业的恶性竞争在逐步缓解,所以,现在让供水管道清洁技术往高端、创新的方向发展已经是这一行业的必由之路了。
3.传统的清理方法消耗大量的人力财力,清理过程繁琐而效果不理想,针对供水管道清理的装置在市面上也不常见,且现有的供水管道清理机器人和供水管道清理装置不能实现多直径管道的清理,且设备笨重,结构复杂,维护成本较高等。
技术实现要素:
4.为了克服现有技术的不足,本发明提供一种封闭管道清理机器,使管道清理机器具有高效清理管道以及消毒杀菌的优点。
5.本发明解决其技术问题所采用的技术方案是:
6.一种封闭管道清理机器,包括臭氧制备模块、臭氧喷洒模块、管道爬行模块、管壁清洁模块、照明模块、透镜模块以及摄像头模块;所述管壁清洁模块包括刷头或刀头;所述管道爬行模块设置在封闭管道清理机器的两端;所述封闭管道清理机器通过管道爬行模块在管道内移动;所述管壁清洁模块用于管道内部的清理;所述臭氧制备模块用于制备臭氧;所述臭氧喷洒模块用于喷洒臭氧制备模块产生的臭氧;所述照明模块和透镜模块用于给管道内部提供照明;所述摄像头模块可拆卸的安装在封闭管道清理机器的一端。
7.在上述的结构中,所述臭氧制备模块包括蓄水桶、电极板以及电极板支架;所述蓄水桶为圆柱体;所述电极板支架和电极板设置在蓄水桶内;所述电极板支架上设置有多片电极板。
8.在上述的结构中,所述臭氧喷洒模块包括液泵、喷杆以及喷头;所述液泵固定在蓄水桶内部的底部;喷杆设置在蓄水桶内的底部,液泵的出口与喷杆进液口连接,喷杆出液口上设置喷口。
9.在上述的结构中,所述管道爬行模块包括支撑座、活动板、轮臂、可伸缩轮臂、连接臂、轮子以及驱动模块;所述支撑座分别连接在蓄水桶和旋转平台上;所述支撑座上设置有棒子,棒子上设有螺纹,活动板中间设置有与棒子适配的螺纹孔,活动板活动连接在支撑座上;连接臂的一端铰接在活动板上,连接臂的另一端铰接在轮臂上;轮臂和可伸缩轮臂的末端设置有轮子;所述驱动模块包括直流电机、第一圆柱齿轮以及第二圆柱齿轮;直流电机设置在轮臂和可伸缩轮臂的侧面;第一圆柱齿轮安装在直流电机的一端,第一圆柱齿轮和第
二圆柱齿轮相互啮合,第二圆柱齿轮与轮子的轴连接;所述管道爬行模块中的可伸缩轮臂包括带有活动卡扣的内轮臂和设有槽口的外轮臂;所述内轮臂设置在外轮臂里面;所述活动卡扣卡在槽口处以连接内轮臂和外轮臂;所述活动卡扣可以通过向下按压以改变可伸缩轮臂的长度;可伸缩轮臂上还设置有驱动电机以驱动可伸缩轮臂旋转;所述支撑座上还设置有步进电机;所述步进电机可以驱动支撑座做到200度旋转。
10.在上述的结构中,所述管壁清洁模块包括旋转平台以及刷头,旋转平台设置在蓄水桶的一端;旋转平台上设置有锯齿状的连接口;所述刷头与旋转平台活动连接;刷头的一端设置有螺母,刷头与旋转平台活动连接时,通过在锯齿状的连接口处接入螺丝,螺丝与刷头的一端预埋的螺母连接以紧固刷头的位置。
11.在上述的结构中,所述管壁清洁模块包括旋转平台以及刀头,旋转平台设置在蓄水桶的一端;旋转平台上设置有锯齿状的连接口;所述刀头与旋转平台活动连接;刀头的一端设置有螺母,刀头与旋转平台活动连接时,通过在锯齿状的连接口处接入螺丝,螺丝与刀头的一端预埋的螺母连接以紧固刀头的位置。
12.在上述的结构中,所述照明模块和透镜模块设置在蓄水桶的外围以及刷头/刀头的内侧;所述照明模块包括灯带和连接装置;连接装置设置在蓄水桶的外侧,灯带通过连接装置连接在蓄水桶的外侧;所述透镜模块包括菲尼尔透镜片和光线扩散板;所述光线扩散板覆盖在灯带的表面;所述菲尼尔透镜片覆盖在光线扩散板的表面。
13.在上述的结构中,所述旋转平台上设置有舵机支架,舵机支架上连接舵机,舵机驱动旋转平台。
14.在上述的结构中,所述支撑座下方固定设置电池模块;电池模块包括多节锂电池。
15.在上述的结构中,所述摄像头模块包括摄像头,摄像头设置在管道爬行模块的活动板上面;摄像头具有2自由度包括水平自由度及垂直自由度,其中,水平自由度可以做到36
°
旋转,垂直自由度可以做到180
°
旋转。
16.本发明的有益效果是:本发明提供了一种封闭管道清理机器,包括臭氧制备模块、臭氧喷洒模块、管道爬行模块、管壁清洁模块、照明模块、透镜模块、摄像头模块以及电池模块;所述管壁清洁模块包括毛刷管壁清洁模块和刀头管壁清洁模块;解决了管道清洁机器不灵活、清洁效果不佳的问题,在使用过程中能提高清洁管道的效果。
附图说明
17.下面结合附图和实施例对本发明进一步说明。
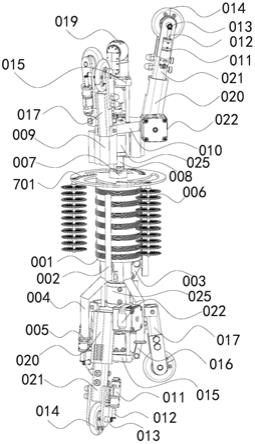
18.图1是本发明的刷头清洁模式装配示意图;
19.图2是本发明的刀头清洁模式装配示意图;
20.图3是本发明的蓄水桶的剖视图;
21.图4是本发明的旋转平台的结构示意图;
22.图5是本发明的轮臂的结构示意图。
具体实施方式
23.以下将结合实施例和附图对本发明的构思、具体结构及产生的技术效果进行清楚、完整地描述,以充分地理解本发明的目的、特征和效果。显然,所描述的实施例只是本发
明的一部分实施例,而不是全部实施例,基于本发明的实施例,本领域的技术人员在不付出创造性劳动的前提下所获得的其他实施例,均属于本发明保护的范围。另外,专利中涉及到的所有联接/连接关系,并非单指构件直接相接,而是指可根据具体实施情况,通过添加或减少联接辅件,来组成更优的联接结构。本发明创造中的各个技术特征,在不互相矛盾冲突的前提下可以交互组合。
24.实施例1
25.参照图1、图3、图4和图5,一种封闭管道清理机器,包括臭氧制备模块、臭氧喷洒模块、管道爬行模块、管壁清洁模块、照明模块、透镜模块以及摄像头模块;所述管壁清洁模块包括刷头006或刀头018;所述管道爬行模块设置在封闭管道清理机器的两端;所述封闭管道清理机器通过管道爬行模块在管道内移动;所述管壁清洁模块用于管道内部的清理;所述臭氧制备模块用于制备臭氧;所述臭氧喷洒模块用于喷洒臭氧制备模块产生的臭氧;所述照明模块和透镜模块用于给管道内部提供照明;所述摄像头模块可拆卸的安装在封闭管道清理机器的一端。
26.所述的臭氧制备模块包括蓄水桶001、电极板102以及电极板支架101;所述蓄水桶001为圆柱体;所述电极板支架101和电极板102设置在蓄水桶001内;所述的电极板支架101上设置有多片电极板102;最大限度的使电极板与蓄水罐里面的水产生电解反应,产出臭氧;臭氧制备模块运用电解氧发生器(eog)将水分子分裂为h2、o2和o3,在eog方法中,氢气将被除去,剩下氧气和臭氧作为唯一的反应产物。
27.所述的臭氧喷洒模块包括液泵103、喷杆004以及喷头005;所述液泵103固定在蓄水桶001内部的底部;喷杆004设置在蓄水桶001内的底部,液泵103的出口104与喷杆004进液口连接,喷杆004出液口上设置喷口005;所述液泵103用于投放至非满管流管道状态下机器人的吸水和排水。
28.所述的管道爬行模块设置在封闭管道清理机器的两端;所述管道爬行模块包括支撑座010、活动板015、轮臂017、可伸缩轮臂、连接臂016、轮子014以及驱动模块;所述支撑座010分别连接在蓄水桶001和旋转平台007上;所述支撑座010上设置有棒子,棒子上设有螺纹,相应的,活动板015中间设置有与螺纹适配的圆孔,活动板015活动连接在支撑座010上;连接臂016的一端铰接在活动板015上,连接臂016的另一端铰接在轮臂017上;轮臂017和可伸缩轮臂的末端设置有轮子014;所述驱动模块包括直流电机011、第一圆柱齿轮012以及第二圆柱齿轮013;直流电机011设置在轮臂017和可伸缩轮臂的侧面;第一圆柱齿轮012安装在直流电机011的一端,第一圆柱齿轮012和第二圆柱齿轮013相互啮合,第二圆柱齿轮013与轮子014的轴连接;所述管道爬行模块中的可伸缩轮臂包括带有活动卡扣024的内轮臂021和设有槽口023的外轮臂020;所述内轮臂021设置在外轮臂020里面;所述活动卡扣024卡在槽口023处以连接内轮臂021和外轮臂020;所述活动卡扣024可以通过向下按压以改变可伸缩轮臂的长度,可伸缩轮臂上还设置有驱动电机022以驱动可伸缩轮臂旋转;所述支撑座010上还设置有步进电机025;所述步进电机025可以驱动支撑座010做到200度旋转。
29.所述的管壁清洁模块包括旋转平台007以及刷头006,旋转平台007设置在蓄水桶001的一端;旋转平台007上设置有锯齿状的连接口701;所述刷头006与旋转平台007活动连接;刷头006的一端设置有螺母,刷头006与旋转平台007活动连接时,通过在锯齿状的连接口701处接入螺丝702,螺丝702与刷头006的一端预埋的螺母连接以紧固刷头006的位置。
30.所述的照明模块和透镜模块设置在蓄水桶001的外围以及刷头006/刀头018的内侧;所述照明模块包括灯带002和连接装置003;连接装置003设置在蓄水桶001的外侧,灯带002通过连接装置003连接在蓄水桶001的外侧;所述透镜模块包括菲尼尔透镜片和光线扩散板;所述光线扩散板覆盖在灯带的表面;所述菲尼尔透镜片覆盖在光线扩散板的表面;所述菲尼尔透镜片是一种可以弯曲的薄片,具有聚集光束的作用。由于管内封闭环境光线昏暗,所述灯带为led,led晶片封装在透明的环氧树脂里面,所以它非常小粒,非常轻巧,在制作与应用上可以节省大量的材料与空间;能耗非常低;led灯的工作电压一般只有2
‑
3.6v,工作电流只要0.02
‑
0.03a,消耗的电不超过0.1w,消耗的电能比相同光效的白炽灯减少90%以上,比节能灯减少70%以上。
31.所述的旋转平台007上设置有舵机支架703,舵机支架703上连接舵机008,舵机008驱动旋转平台007。
32.所述支撑座010下方固定设置电池模块009;电池模块009包括多节锂电池。电池模块009可以根据需求随意串并联锂电池进行组合,满足要求的同时可以减小体积。
33.所述摄像头模块包括摄像头019,摄像头019设置在管道爬行模块的活动板015上面;摄像头019具有2自由度包括水平自由度及垂直自由度,其中,水平自由度可以做到36
°
旋转,垂直自由度可以做到180
°
旋转;摄像头模块可以将视频采集设备产生的模拟视频信号转换成数字信号,进而将其储存在计算机里,或者实时查看图像。
34.实施例2
35.如图2所述,本实施例与实施例1的不同之处在于,所述的管壁清洁模块包括旋转平台007以及刀头018,旋转平台007设置在蓄水桶001的一端;旋转平台007上设置有锯齿状的连接口701;所述刀头018与旋转平台007活动连接;刀头018的一端设置有螺母,刀头018与旋转平台007活动连接时,通过在锯齿状的连接口701处接入螺丝702,螺丝702与刀头018的一端预埋的螺母连接以紧固刀头018的位置。
36.封闭管道清理机器在工作过程中,蓄水桶001中的电极板102与水产生电解反应从而产生臭氧;蓄水桶001中液泵103同时完成吸取水体和加压喷洒气化消毒液体;舵机驱动旋转平台从而带动刷头/刀头旋转;管道爬行模块中的直流电机011驱动第一圆柱齿轮012转动,从而带动第二圆柱齿轮013转动,第二圆柱齿轮013与轮子014的轴连接,最后带动轮子014转动;轮子014转动使整个机器在管道中移动;所述灯带002为机器在管道中提供照明,并且可以弯折灯带002表面的菲尼尔透镜片以调整聚集光束的焦点,摄像头模块可以将视频采集设备产生的模拟视频信号转换成数字信号,进而将其储存在计算机里,或者实时查看图像。可伸缩轮臂可以通过调整活动卡扣024来调节可伸缩轮臂的长度,步进电机022可以调整支撑座010的角度将机器的一端抬升,使机器对准水管的三通口,然后机器的另一端的轮子014驱动,机器在水管中调整好角度后,可伸缩轮臂复位。
37.以上是对本发明的较佳实施进行了具体说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本发明精神的前提下还可做出种种的等同变形或替换,这些等同的变形或替换均包含在本技术权利要求所限定的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1