基于智能材料驱动的软体管道探测机器人
1.本发明涉及管道探测机器人技术领域,尤其是涉及一种基于智能材料驱动的软体管道探测机器人。
背景技术:
2.近年来,随着微电子技术、微传感技术、精密加工技术以及新材料的发展,使得机器人领域的一个重要分支—轻小型移动机器人得以蓬勃发展,其中,又以具有柔顺性、安全性、共融性等特征的软体机器人为典型代表。软体机器人由于尺度小、质量轻、运动灵活,因而在军事侦察、大型发动机检测、灾难救援、医学工程等领域具有广阔的应用前景。在软体机器人的众多应用领域中,其柔软大变形的特性特别适合进行管道或人体自然腔道检测。一些大型航空发动机的管道直径只有几毫米,传统的电机加齿轮箱的驱动模式的机器人难以微型化,适用于微型管道检测的机器人设计制造难度极大。
3.近年来,应用于管道移动机器人的新型驱动技术被大量开发。根据驱动原理不同,目前研发的新型驱动技术主要包括基于压电材料的驱动、基于形状记忆合金的驱动和气动驱动器等。形状记忆合金响应速度较慢,压电材料易碎,加工制造复杂形状难度大,而气动驱动也通常需要庞大的外部气源及气路系统而受到限制。
技术实现要素:
4.本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明的一个目的在于提出一种基于智能材料驱动的软体管道探测机器人,结构简单,整体更容易小型化,可实现在狭窄管道内的快速移动,可以适应复杂弯曲管道环境探测的需求。
5.根据本发明实施例的基于智能材料驱动的软体管道探测机器人,包括:
6.伸长单元,所述伸长单元包括柱状的第一介电弹性体驱动器,所述第一介电弹性体驱动器施加电压后轴向伸长;
7.两个锚固单元,两个所述锚固单元中的一个所述锚固单元为前部锚固单元且另一个所述锚固单元为后部锚固单元,两个所述锚固单元分别位于所述伸长单元的轴向两端且与所述伸长单元同轴对接相连;每一所述锚固单元包括柱状的第二介电弹性体驱动器和两个柔性铰链,每一所述柔性铰链包括基部和多个支链,多个所述支链围绕所述基部的周边阵列分布,多个所述支链均包括支链主体和支链末端,所述支链主体的一端与所述基部的周边之间以及所述支链主体的另一端与所述支链末端的一端之间均采用柔性连接,两个所述柔性铰链的所述基部分别一一对应地与所述第二介电弹性体驱动器的轴向两端相连,两个所述柔性铰链的多个所述支链末端一一对应地粘贴相连形成锚固足,并使得两个所述柔性铰链的多个所述支链与所述第二介电弹性体驱动器的外周面呈锐角布置;当所述第二介电弹性体驱动器施加电压后,所述第二介电弹性体驱动器轴向伸长而使得所述锚固单元的径向尺寸缩小;
8.工作时,所述基于智能材料驱动的软体管道探测机器人置于管道中后,由于两个
所述锚固单元的初始直径比所述管道的内直径大,因而两个所述锚固单元在径向方向上会经预压缩后被放置于所述管道中并通过所述锚固足锚固在所述管道的内壁上,由于两个所述锚固单元的所述第二介电弹性体驱动器本身弹力的作用会产生预紧力,当所述前部锚固单元施加电压后而使自身预紧力减小,同时所述伸长单元施加电压后自身轴向伸长,使得所述基于智能材料驱动的软体管道探测机器人前伸一段距离,进而所述前部锚固单元断电而使自身锚固力恢复,将所述基于智能材料驱动的软体管道探测机器人前伸距离锁住,而所述后部锚固单元开始施加电压而使自身锚固力减小,所述伸长单元断电后在弹性力的作用下恢复长度,带动所述后部锚固单元前进,从而使所述基于智能材料驱动的软体管道探测机器人在两个所述锚固单元及所述伸长单元的协调下实现前进运动。
9.根据本发明实施例的基于智能材料驱动的软体管道探测机器人,一方面采用伸长单元、前部锚固单元和后部锚固单元三段式结构形式,其中伸长单元、前部锚固单元和后部锚固单元均是基于介电弹性体材料驱动,结构柔软,耐冲击,环境适应性好,适应各种复杂弯曲管道环境探测的需求,且介电弹性体材料电响应频率较快、变形大、机电转换效率高,可实现在狭窄管道内的快速移动;另一方面本发明实施例的基于智能材料驱动的软体管道探测机器人,结构简单制造方便,整体更容易小型化,可以满足亚厘米级管道探测的需求,应用前景广阔。
10.根据本发明的一个实施例,所述伸长单元还包括分别嵌设有第一磁铁的两个所述第一连接件以及分别嵌设有第二磁铁的两个同心结构件,两个所述第一连接件分别对应地固定在所述第一介电弹性体驱动器的轴向两端上,两个所述同心结构件的所述第二磁铁与两个所述第一连接件中的所述第一磁铁吸合相连;每一所述锚固单元还包括嵌设有第三磁铁的第二连接件,所述第二连接件固定在所述锚固单元的两个所述柔性铰链的其中一个所述柔性铰链的基部上;两个所述锚固单元分别通过各自的所述第二连接件中的所述第三磁铁与所述伸长单元的相应的所述同心结构件中的所述第二磁铁吸合,以使两个所述锚固单元与所述伸长单元分别对接相连。
11.根据本发明的一个实施例,所述第一介电弹性体驱动器和所述第二介电弹性体驱动器分别为圆柱状且分别由片状驱动器卷绕而成,所述片状驱动器具有在电压加载下会发生厚度减小且面积扩张的变形行为特性。
12.根据本发明进一步的实施例,所述片状驱动器由硅橡胶层和碳纳米管电极层依次交替堆叠而成。
13.根据本发明进一步的实施例,所述第一介电弹性体驱动器中的所述硅橡胶层的材料由第一硅橡胶与第二硅橡胶按照1:1的比例混合而成。
14.根据本发明进一步的实施例,所述第二介电弹性体驱动器中的所述硅橡胶层的材料由第三硅橡胶与第四硅橡胶按照3:1的比例混合而成。
15.根据本发明的一个实施例,所述锚固足的表面上覆盖有用于增加摩擦力的锚固硅橡胶。
16.根据本发明的一个实施例,每一所述柔性铰链由复合材料切割而成,所述复合材料为柔性薄膜、粘接片和碳纤维板热压后得到,其中,所述柔性薄膜的两侧均设有所述粘接片和所述碳纤维板,所述粘接片将所述碳纤维板与所述柔性薄膜粘结固定,所述粘接片和所述碳纤维板在对应于所述柔性铰链上的所述柔性连接的部位处均设置镂空部。
17.根据本发明的一个实施例,所述第一介电弹性体驱动器施加的电压为正弦波信号电压,两个所述锚固单元的所述第二介电弹性体驱动器施加的电压为方波电压信号。
18.根据本发明进一步的实施例,所述前部锚固单元的电压驱动信号相位为0
°
,所述伸长单元的电压驱动信号相位为270
°
,所述后部锚固单元的电压驱动信号相位为180
°
。
19.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
20.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
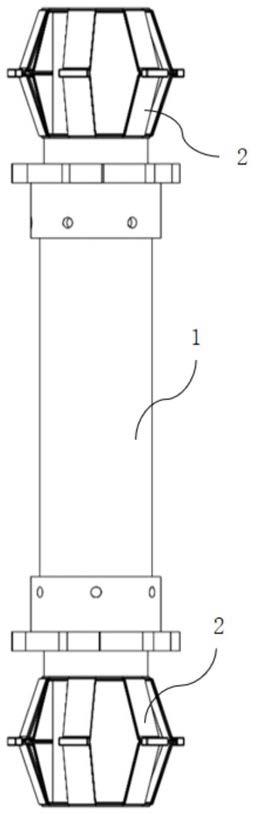
21.图1为本发明实施例的基于智能材料驱动的软体管道探测机器人的结构示意图。
22.图2为本发明实施例的基于智能材料驱动的软体管道探测机器人的立体装配图。
23.图3为本发明实施例的基于智能材料驱动的软体管道探测机器人中锚固单元的结构示意图。
24.图4为本发明实施例的基于智能材料驱动的软体管道探测机器人中同心结构件的结构示意图。
25.图5为本发明实施例的基于智能材料驱动的软体管道探测机器人中第一连接件的结构示意图。
26.图6为本发明实施例的基于智能材料驱动的软体管道探测机器人中第二连接件的结构示意图。
27.图7为本发明实施例的基于智能材料驱动的软体管道探测机器人中碳纤维板的激光切割路径示意图。
28.图8为本发明实施例的基于智能材料驱动的软体管道探测机器人中柔性铰链的加工示意图。
29.附图标记:
30.基于智能材料驱动的软体管道探测机器人1000
31.伸长单元1
32.第一介电弹性体驱动器101
ꢀꢀ
第一连接件102
ꢀꢀ
第一磁铁103
33.同心结构件104
ꢀꢀ
第二磁铁105
34.锚固单元2
35.第二介电弹性体驱动器201
ꢀꢀ
柔性铰链202
ꢀꢀ
支链2021
36.基部2022
ꢀꢀ
支链主体2023
ꢀꢀ
支链末端2024
ꢀꢀ
锚固足2025
37.第二连接件203
ꢀꢀ
第三磁铁204
ꢀꢀ
柔性薄膜205
ꢀꢀ
粘接片206
38.碳纤维板207
ꢀꢀ
镂空部208
ꢀꢀ
不锈钢热压模具209
具体实施方式
39.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
40.下面结合图1至图6来描述根据本发明实施例的基于智能材料驱动的软体管道探测机器人1000,用于置入管道内,可以在狭窄的管道内移动。
41.如图1至图6所示,根据本发明实施例的基于智能材料驱动的软体管道探测机器人1000,包括伸长单元1和两个锚固单元2。
42.伸长单元1包括柱状的第一介电弹性体驱动器101,第一介电弹性体驱动器101施加电压后轴向伸长;两个锚固单元2中的一个锚固单元2为前部锚固单元且另一个锚固单元2为后部锚固单元,两个锚固单元2分别位于伸长单元1的轴向两端且与伸长单元1同轴对接相连;每一锚固单元2包括柱状的第二介电弹性体驱动器201和两个柔性铰链202,每一柔性铰链202包括基部2022和多个支链2021,多个支链2021围绕基部2022的周边阵列分布,多个支链2021均包括支链主体2023和支链末端2024,支链主体2023的一端与基部2022的周边之间以及支链主体2023的另一端与支链末端2024的一端之间均采用柔性连接,两个柔性铰链202的基部2022分别一一对应地与第二介电弹性体驱动器201的轴向两端相连,两个柔性铰链202的多个支链末端2024一一对应地粘贴相连形成锚固足2025,并使得两个柔性铰链202的多个支链2021与第二介电弹性体驱动器201的外周面呈锐角布置;当第二介电弹性体驱动器201施加电压后,第二介电弹性体驱动器201轴向伸长而使得锚固单元2的径向尺寸缩小。
43.具体地,伸长单元1包括柱状的第一介电弹性体驱动器101,第一介电弹性体驱动器101施加电压后轴向伸长。这里,第一介电弹性体驱动器101为柱状,可以是圆柱状或棱柱状等,第一介电弹性体驱动器101可以由片状驱动器加工而成,例如圆柱状的介电弹性体驱动器可以通过片状驱动器卷绕而成;第一介电弹性体驱动器101的变形机理是:片状驱动器在电压加载下会发生厚度减小,面积扩张的变形行为,从而片状驱动器卷绕成柱状后在电压的加载下会转化为轴向伸长的变形行为。在对第一介电弹性体驱动器101施加电压的过程中,第一介电弹性体驱动器101会在施加电压后沿轴向伸长,断电后会在弹性力的作用下恢复长度。
44.两个锚固单元2中的一个锚固单元2为前部锚固单元且另一个锚固单元2为后部锚固单元,两个锚固单元2分别位于伸长单元1的轴向两端且与伸长单元1同轴对接相连。可以理解的是,前部锚固单元和后部锚固单元均用于与管道内壁锚固,例如当后部锚固单元与管道内壁锚固,前部锚固单元解除锚固时,第一介电弹性体驱动器101伸长,然后前部锚固单元与管道内壁锚固,后部锚固单元与管道内壁解除锚固,第一介电弹性体驱动器101缩回,从而实现本发明软体管道探测机器人1000的前进运动过程。锚固单元2与伸长单元1同轴对接相连,这样有利于保证管道与软体管道探测机器人1000的同心度,进而保证锚固单元2的锚固效果。
45.每一锚固单元2包括柱状的第二介电弹性体驱动器201和两个柔性铰链202。这里,第二介电弹性体驱动器201为柱状,可以是圆柱状或棱柱状等,第二介电弹性体驱动器201可以由片状驱动器加工而成,例如圆柱状的第二介电弹性体驱动器201可以通过片状驱动器卷绕而成;第二介电弹性体驱动器201的变形机理是:片状驱动器在电压加载下会发生厚度减小,面积扩张的变形行为,从而片状驱动器卷绕成柱状后在电压的加载下会转化为轴向伸长的变形行为。当第二介电弹性体驱动器201施加电压后,第二介电弹性体驱动器201能够轴向伸长,当第二介电弹性体驱动器201断电后,第二介电弹性体驱动器201能够轴向
缩回。
46.如图3所示,每一柔性铰链202包括基部2022和多个支链2021,多个支链2021围绕基部2022的周边阵列分布,有利于径向传力均匀;多个支链2021均包括支链主体2023和支链末端2024,支链主体2023的一端与基部2022的周边之间以及支链主体2023的另一端与支链末端2024的一端之间均采用柔性连接,也就是说,柔性铰链202的基部2022、支链主体2023、支链末端2024具有一定的刚度,起刚性支撑的作用,而柔性铰链202的柔性连接的部位可以使得支链主体2023相对于基部2022可转动,可以使得支链末端2024与支链主体2023之间可转动。两个柔性铰链202的基部2022分别一一对应地与第二介电弹性体驱动器201的轴向两端相连,两个柔性铰链202的多个支链末端2024一一对应地粘贴相连形成锚固足2025,并使得两个柔性铰链202的多个支链2021与第二介电弹性体驱动器201的外周面呈锐角布置。可以理解的是,由于柔性铰链202的基部2022、支链主体2023、支链末端2024具有一定的刚度,起刚性支撑的作用,而柔性铰链202的柔性连接的部位可以使得支链主体2023相对于基部2022可转动,可以使得支链末端2024与支链主体2023之间可转动,因此,两个柔性铰链202的基部2022分别一一对应地与第二介电弹性体驱动器201的轴向两端相连,两个柔性铰链202的多个支链末端2024一一对应地粘贴相连形成锚固足2025,使锚固单元2整体上既具有一定的刚性,又能兼顾软体驱动器抗冲击的特性。
47.当第二介电弹性体驱动器201施加电压后,第二介电弹性体驱动器201轴向伸长而使得锚固单元2的径向尺寸缩小,从而可实现在电压调控下快速地将第二介电弹性体驱动器201轴向的输出力转化为径向的输出力,且仅通过调节电压高低即可实现对径向的输出力大小的调节。具体地,当对第二介电弹性体驱动器201施加电压后,第二介电弹性体驱动器201沿轴线伸长变形,使得两个柔性铰链202的多个支链主体2023向第二介电弹性体驱动器201的外周面收拢变形,锚固单元2的径向尺寸缩小。因此,当基于智能材料驱动的软体管道探测机器人1000置入管道时,两个锚固单元2的初始直径要求比管道的内直径略大,两个锚固单元2在径向方向上会经预压缩后被放置于管道中并通过锚固足2025锚固在管道的内壁上,当两个锚固单元2的第二介电弹性体驱动器201本身弹力的作用会产生预紧力,当两个锚固单元施加电压后可以使自身预紧力减小,从而使锚固足2025解除与管道内壁的锚固;当对第二介电弹性体驱动器201停止施加电压后,第二介电弹性体驱动器201会轴向缩回变形,使得两个柔性铰链202的多个支链2021远离第二介电弹性体驱动器201的外周面张开变形,锚固单元2的径向尺寸增大,锚固足2025与管道内壁接触,锚固单元2自身锚固力恢复,因此锚固单元2可实现在电压调控下快速地将第二介电弹性体驱动器201轴向的输出力转化为径向的输出力的过程,且仅通过调节施加电压与否即可实现对输出力的调控,控制方便。
48.本发明实施例的基于智能材料驱动的软体管道探测机器人1000在工作时,首先将基于智能材料驱动的软体管道探测机器人1000置于管道中后,由于两个锚固单元2的初始直径比管道的内直径大,因而两个锚固单元2在径向方向上会经预压缩后被放置于管道中并通过锚固足2025锚固在管道的内壁上,由于两个锚固单元2的第二介电弹性体驱动器201本身弹力的作用会产生预紧力,当前部锚固单元施加电压后而使自身预紧力减小,同时伸长单元1施加电压后自身轴向伸长,使得基于智能材料驱动的软体管道探测机器人1000前伸一段距离,进而前部锚固单元断电而使自身锚固力恢复,将基于智能材料驱动的软体管
道探测机器人1000前伸距离锁住,而后部锚固单元开始施加电压而使自身锚固力减小,伸长单元1断电后在弹性力的作用下恢复长度,带动后部锚固单元前进,从而使基于智能材料驱动的软体管道探测机器人1000在两个锚固单元2及伸长单元1的协调下实现前进运动,从而实现了在狭窄管道内的快速移动,同时本发明软体管道探测机器人柔性的结构具有很好的环境适应性,可以适应各种复杂弯曲管道环境探测的需求。
49.根据本发明实施例的基于智能材料驱动的软体管道探测机器人1000,一方面采用伸长单元1、前部锚固单元2和后部锚固单元2三段式结构形式,其中伸长单元1、前部锚固单元2和后部锚固单元2均是基于介电弹性体材料驱动,结构柔软,耐冲击,环境适应性好,适应各种复杂弯曲管道内环境探测的需求,且介电弹性体材料电响应频率较快、变形大、机电转换效率高,可实现在狭窄管道内的快速移动;另一方面本发明实施例的基于智能材料驱动的软体管道探测机器人1000,结构简单制造方便,整体更容易小型化,可以满足亚厘米级管道探测的需求,应用前景广阔。
50.根据本发明的一个实施例,如图2和图4至图6所示,伸长单元1还包括分别嵌设有第一磁铁103的两个第一连接件102以及分别嵌设有第二磁铁105的两个同心结构件104,两个第一连接件102分别对应地固定在第一介电弹性体驱动器101的轴向两端上,两个同心结构件104的第二磁铁105与两个第一连接件102中的第一磁铁103吸合相连;每一锚固单元2还包括嵌设有第三磁铁204的第二连接件203,第二连接件203固定在锚固单元2的两个柔性铰链202的其中一个柔性铰链202的基部2022上;两个锚固单元2分别通过各自的第二连接件203中的第三磁铁204与伸长单元1的相应的同心结构件104中的第二磁铁105吸合,以使两个锚固单元2与伸长单元1分别对接相连。可以理解的是,锚固单元2与伸长单元1采用磁吸的方式进行连接,可实现不同单元的快速组合以及单元损坏后的快速更换,例如当需要对直径更大的管道进行探测时,此时可以更换伸长单元1轴向两端的锚固单元2,使锚固单元2的直径在未施加电压的情况下与管道内壁的直径相适应;当锚固单元2的锚固足2025等结构磨损后,也可以直接快速地更换锚固单元2,保证软体管道探测器机器人1000的使用效果;同心结构件104的主要作用是保持软体管道探测器机器人1000与管道的同心度,因为软体管道探测器机器人1000整体结构较软,软体管道探测器机器人1000与管道在不能保证同心的情况下,锚固单元2的锚固效果较差。
51.根据本发明进一步的实施例,如图1至图2和图5所示,第一连接件102的侧壁上开设有圆孔,第一连接件102通过环氧导电胶分别对应地固定在第一介电弹性体驱动器101的轴向两端上,第一介电弹性体驱动器101的轴向两端面为电极连接区,组装时,导线穿过圆孔通过导电胶固定在第一介电弹性体驱动器101的电极连接区,采用这样的方式,使用效果更好。
52.根据本发明的一个实施例,第一介电弹性体驱动器101和第二介电弹性体驱动器201分别为圆柱状且分别由片状驱动器卷绕而成,片状驱动器具有在电压加载下会发生厚度减小且面积扩张的变形行为特性。也就是说,由于片状驱动器的这种特性,当对圆柱体的第一介电弹性体驱动器101和第二介电弹性体驱动器201施加电压时,第一介电弹性体驱动器101和第二介电弹性体驱动器201会沿轴线伸长变形;当对圆柱体的第一介电弹性体驱动器101和第二介电弹性体驱动器201停止施加电压后,第一介电弹性体驱动器101和第二介电弹性体驱动器201会沿轴线缩短变形,方便控制。另外,圆柱体的介电弹性体驱动器加工
起来更加快捷方便。
53.根据本发明进一步的实施例,片状驱动器由硅橡胶层和碳纳米管电极层依次交替堆叠而成。可以理解的是,硅橡胶层会在电压的加载下发生形变,碳纳米管电极层用于向硅橡胶层施加电压从而引起硅橡胶层的形变,另外碳纳米管电极层可以跟随硅橡胶层发生形变。
54.根据本发明再进一步的实施例,片状驱动器采用刮刀涂膜法制成,刮刀涂膜法为:在pet薄膜上使用刮膜机的刮刀刮涂一层硅橡胶薄膜后进行加热,待该层硅橡胶固化后覆盖一层带有特定形状的掩模版,然后转印一层经真空抽滤单壁碳纳米管水溶液后得到的碳纳米管,移去该掩模版后再次进行刮膜,重复这一过程直到得到片状驱动器。制备片状驱动器时采用刮刀涂膜法可以实现大面积制作,制作方便、效率高。
55.根据本发明再进一步的实施例,第一介电弹性体驱动器101中的硅橡胶层的材料由第一硅橡胶与第二硅橡胶按照1:1的比例混合而成,这种硅橡胶材料质地更软,伸缩性更好。
56.具体地,第一硅橡胶为ecoflex0030硅橡胶,ecoflex0030硅橡胶为一种铂金催化的硅橡胶(platinum
‑
catalyzed silicones),包括part a(组分a)和part b(组分b),使用时,将重量份比例为1:1的part a(组分a)和part b(组分b)混合得到第一硅橡胶;第二硅橡胶为美国道康宁sylgard 184,美国道康宁sylgard 184包括silicone elastomer curing agent(硅橡胶固化剂)和silicone elastomer base(硅橡胶基底),使用时,将重量份比例为40:1的silicone elastomer base(硅橡胶基底)和silicone elastomer curong agent(硅橡胶固化剂)混合得到第二硅橡胶。
57.根据本发明再进一步的实施例,第二介电弹性体驱动器201中的硅橡胶层的材料由第三硅橡胶与第四硅橡胶按照3:1的比例混合而成,采用这种比例混合而成的硅橡胶层相比于第一介电弹性体驱动器101中的硅橡胶层质地较硬,不易发生变形,有利于锚固单元2实现较好的锚固效果。
58.具体地,第三硅橡胶为法国埃肯si lbione lsr 4305,法国埃肯si lbione lsr 4305包括part a(组分a)和part b(组分b),使用时,将重量份比例为1:1的part a(组分a)和part b(组分b)混合得到第三硅橡胶;第四硅橡胶为美国道康宁sylgard184,美国道康宁sylgard 184包括silicone elastomer curing agent(硅橡胶固化剂)和silicone elastomer base(硅橡胶基底),使用时,将重量份比例为10:1的silicone elastomer base(硅橡胶基底)和silicone elastomer curong agent(硅橡胶固化剂)混合得到第四硅橡胶。
59.根据本发明的一个实施例,锚固足2025的表面上覆盖有用于增加摩擦力的锚固硅橡胶。这样,在基于智能材料驱动的软体管道探测机器人1000向前运动的过程中,锚固足2025与管道内壁可以实现更加稳定可靠的锚固,减少锚固足2025与管道之间发生相对滑动可能性,使移动效率更高、更加平稳可靠。优选的,锚固硅橡胶采用的是smooth
‑
on公司的sil
‑
poxy硅橡胶,使用效果好。
60.根据本发明的一个实施例,如图7和图8所示,每一柔性铰链202由复合材料切割而成,复合材料为柔性薄膜205、粘接片206和碳纤维板207热压后得到,其中,柔性薄膜205的两侧均设有粘接片206和碳纤维板207,粘接片206将碳纤维板207与柔性薄膜205粘结固定,
粘接片206和碳纤维板207在对应于柔性铰链202上的柔性连接的部位处均设置镂空部208。可以理解的是,柔性薄膜205的两侧均设有粘接片206和碳纤维板207,这样可以增加柔性铰链202的使用强度,保证柔性铰链202的使用效果。需要说明的是,获得镂空部208的过程为,在热压之前,分别在粘接片206和碳纤维板207对应的位置上利用紫外激光切割的方法切割出镂空部208的形状,然后依次将粘接片206、柔性薄膜205和碳纤维板207叠压在一起,再利用不锈钢热压模具209进行热压获得复合材料,获得的复合材料按照设定的激光切割路径进行二次激光切割就可以得到柔性铰链202。由于镂空部208处的柔性薄膜205无碳纤维板207和粘接片206覆盖,实现了支链主体2023的一端与基部2022的周边之间以及支链主体2023的另一端与支链末端2024连接部的一端之间的柔性连接功能。柔性铰链202的除镂空部208以外的其余区域则由碳纤维板207提供刚性支撑。优选的,碳纤维板207的厚度为100μm,使用效果好,粘接片206采用杜邦公司的pyralux fr0100,厚度为25μm。其中,碳纤维板207包括三层碳纤维层,碳纤维板207采用三层碳纤维预浸带依次按照0
°
、90
°
、0
°
的方向压制而成。位于柔性薄膜303两侧的碳纤维板305在与柔性薄膜303和粘接片304一起热压时,再相差90
°
进行热压,这样就可以保证柔性铰链3使用强度的各向同性。
61.根据本发明的一个实施例,第一介电弹性体驱动器101施加的电压为正弦波信号电压,两个锚固单元2的第二介电弹性体驱动器201施加的电压为方波电压信号。可以理解的是,对第一介电弹性体驱动器101施加正弦波信号电压,由于正弦波信号电压是缓和连续变化的电压,因此,在第一介电弹性体驱动器101随电压发生形变的过程中,伸长过程是逐渐进行的,这样会使本发明实施例的基于智能材料驱动的软体管道探测机器人1000不容易发生滑移,运动更加高效。在对第一介电弹性体驱动器101施加正弦电压的过程中,第一介电弹性体驱动器101会在施加电压逐渐增加时沿轴向逐渐伸长,施加电压逐渐减小时沿轴向逐渐缩短,直到电压减小到零后(即断电后),在弹性力的作用下恢复长度。而直接对第二介电弹性体驱动器201施加方波电压信号,可以使第二介电弹性体驱动器201产生更快的响应,以实现快速锚固和解除锚固过程,进而有利于实现本发明软体管道探测器机器人1000的快速前进。
62.根据本发明进一步的实施例,前部锚固单元的电压驱动信号相位为0
°
,伸长单元1的电压驱动信号相位为270
°
,后部锚固单元的电压驱动信号相位为180
°
。这样,本发明实施例的基于智能材料驱动的软体管道探测机器人1000就可以实现如下过程,首先,施加在后部锚固单元的电压为0,前部锚固单元施加电压后而使自身预紧力减小,同时开始对伸长单元1施加从0开始增加的正弦电压,伸长单元1自身轴向伸长,使得基于智能材料驱动的软体管道探测机器人1000前伸一段距离,然后,前部锚固单元施加的电压变为0使自身锚固力恢复,将基于智能材料驱动的软体管道探测机器人1000前伸距离锁住,同时对后部锚固单元施加电压,使自身锚固力减小,逐渐减小施加在伸长单元1上的电压,伸长单元1在弹性力的作用下恢复长度,带动后部锚固单元前进,从而使基于智能材料驱动的软体管道探测机器人1000在两个锚固单元2及伸长单元1的协调下实现前进运动。
63.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、或者特点可以在
任何的一个或多个实施例或示例中以合适的方式结合。
64.尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1