一种医院供应科室用氧气罐批量充气装置的制作方法
1.本发明涉及一种充气装置,尤其涉及一种医院供应科室用氧气罐批量充气装置。
背景技术:
2.氧气罐使用前,都要将氧气罐进行充气。目前,大多数人们都是手动对氧气罐进行充气,首先操作人员将氧气罐通过管子连接至制氧机器上,打开制氧机进行充气,如此操作比较麻烦,工作效率还低,且充气时氧气罐容易晃动,影响充气效率。
3.因此需要设计一种方便人们对氧气罐进行充气,工作效率高,且对氧气罐进行限位的医院供应科室用氧气罐批量充气装置,以解决现有技术问题。
技术实现要素:
4.为了克服通过管子连接至制氧机器上进行充气,如此操作比较麻烦,工作效率还低,且充气时氧气罐容易晃动,影响充气效率的缺点,技术问题为:提供一种方便人们对氧气罐进行充气,工作效率高,且对氧气罐进行限位的医院供应科室用氧气罐批量充气装置。
5.本发明的技术方案是:一种医院供应科室用氧气罐批量充气装置,包括有:支撑底座,支撑底座一侧对称式设有支撑立柱;密闭箱体,密闭箱体安装在两根支撑立柱与支撑底座之间;散热窗,散热窗安装在密闭箱体上;启动按钮,启动按钮安装在密闭箱体上;停止按钮,停止按钮安装在密闭箱体上;支撑架,支撑架对称式安装在密闭箱体上;储罐箱,储罐箱安装在密闭箱体上;上料板,上料板安装在储罐箱上;定位杆,定位杆安装在储罐箱上;保护罩,保护罩安装在两个支撑架之间;充气机构,安装在密闭箱体上,用于进行充气;下料机构,安装在充气机构与密闭箱体之间,用于进行下料。
6.进一步的,充气机构包括有:支撑立板,支撑立板对称式安装在密闭箱体上;定位放置板,定位放置板铰接式安装在两个支撑立板之间;限位框,限位框安装在定位放置板上;氧气储存筒,氧气储存筒安装在密闭箱体上;增压泵,增压泵安装在氧气储存筒上并连通;充气压板,充气压板滑动式安装在定位放置板上;伸缩软管,伸缩软管安装在充气压板与增压泵之间并连通;压力管,压力管安装在充气压板上,压力管与伸缩软管连通;伸缩推杆,伸缩推杆安装在定位放置板上,伸缩推杆与充气压板固定连接。
7.进一步的,下料机构包括有:下料箱,下料箱安装在密闭箱体上;光电传感器,光电传感器安装在下料箱上;电动推杆,电动推杆安装在两个支撑立板之间;活动转块,活动转块安装在电动推杆上,活动转块与定位放置板转动连接;密闭活塞,密闭活塞滑动式安装在伸缩软管上;第一压力传感器,第一压力传感器安装在伸缩软管上。
8.进一步的,还包括有间隔上料机构,间隔上料机构包括有:定位横轴,定位横轴转动式安装在保护罩上;分料滚筒,分料滚筒安装在定位横轴上;复位短柱,复位短柱间隔安装在保护罩上;联动横杆,联动横杆滑动式安装在两根复位短柱之间;固定底板,固定底板安装在上料板上;定位横杆,定位横杆转动式安装在固定底板上;铰接短杆,铰接短杆对称式安装在定位横杆上,铰接短杆与联动横杆转动连接;受力短柱,受力短柱转动式安装在联
动横杆上;限位环,限位环对称式安装在定位横轴上;卡位短柱,卡位短柱安装在联动横杆上,限位环与卡位短柱配合。
9.进一步的,还包括有夹紧机构,夹紧机构包括有:导向轨,导向轨安装在定位放置板上;驱动齿条,驱动齿条滑动式安装在导向轨上;换向齿轮,换向齿轮转动在定位放置板上,换向齿轮与驱动齿条啮合;从动齿条,从动齿条滑动式安装在导向轨上,从动齿条与换向齿轮啮合;定位导柱,定位导柱对称式安装在定位放置板上;夹紧顶板,夹紧顶板滑动式安装在两根定位导柱之间,夹紧顶板与从动齿条固定连接。
10.进一步的,还包括有缓冲机构,缓冲机构包括有:缓冲海绵块,缓冲海绵块安装在下料箱上;缓冲短柱,缓冲短柱对称式安装在下料箱上;缓冲底板,缓冲底板滑动式安装在两根缓冲短柱之间。
11.进一步的,还包括有挡料机构,挡料机构包括有:伸缩电磁阀,伸缩电磁阀安装在上料板上;挡料板,挡料板安装在伸缩电磁阀上;第二压力传感器,第二压力传感器安装在定位放置板上;倾斜架,倾斜架铰接式安装在定位放置板上。
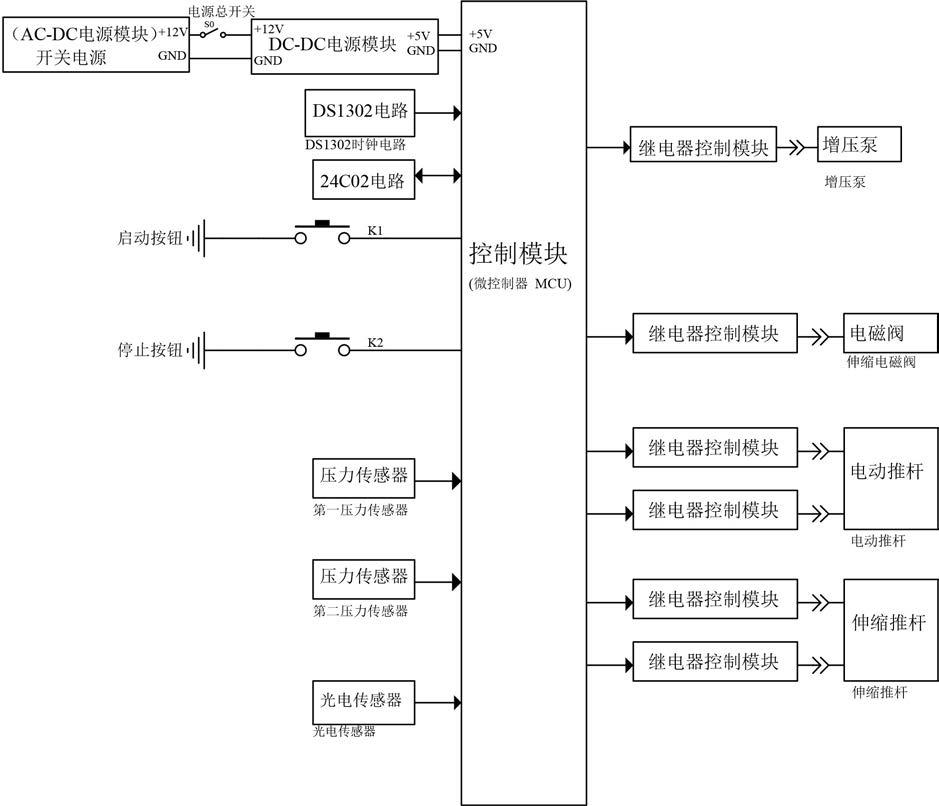
12.进一步的,还包括有电控箱,电控箱安装于密闭箱体一侧,电控箱内包括有开关电源、电源模块和控制模块,开关电源为整个设备供电,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;启动按钮、停止按钮、第一压力传感器、第二压力传感器和光电传感器都与控制模块通过电性连接;增压泵、伸缩电磁阀、电动推杆和伸缩推杆都与控制模块通过外围电路连接。
13.本发明具有以下优点:1、本发明通过将三个氧气罐放置在定位放置板上,启动伸缩推杆使得充气压板向前移动与氧气罐接触,进而增压泵通过伸缩软管对收集进行充气,如氧气罐内装满适量氧气,定位放置板向下摆动带动氧气罐滑落至下料箱内,如此,可方便人们对氧气罐进行充气,工作效率高。
14.2、本发明通过夹紧机构的作用,夹紧顶板向下移动对氧气罐限位,如此,可避免充气时氧气罐产生晃动。
15.3、本发明通过缓冲机构的作用,缓冲底板通过缓冲短柱对氧气罐起到缓冲,如此,可避免滑落至下料箱内时产生破损。
附图说明
16.图1为本发明的立体结构示意图。
17.图2为本发明的第一种部分立体结构示意图。
18.图3为本发明的第二种部分立体结构示意图。
19.图4为本发明的充气机构的第一种部分立体结构示意图。
20.图5为本发明的充气机构的第二种部分立体结构示意图。
21.图6为本发明的下料机构的第一种部分立体结构示意图。
22.图7为本发明的下料机构的第二种部分立体结构示意图。
23.图8为本发明的下料机构的第三种部分立体结构示意图。
24.图9为本发明的间隔上料机构的第一种部分立体结构示意图。
25.图10为本发明的间隔上料机构的第二种部分立体结构示意图。
26.图11为本发明的夹紧机构的第一种部分立体结构示意图。
27.图12为本发明的夹紧机构的第二种部分立体结构示意图。
28.图13为本发明的缓冲机构的部分立体结构示意图。
29.图14为本发明的挡料机构的第一种部分立体结构示意图。
30.图15为本发明的挡料机构的第二种部分立体结构示意图。
31.图16为本发明的电路框图。
32.图17为本发明的电路原理图。
33.图中标号名称:1-密闭箱体,2-支撑底座,3-支撑立柱,4-散热窗,5-电控箱,51-启动按钮,52-停止按钮,6-支撑架,7-储罐箱,71-上料板,72-定位杆,8-保护罩,9-充气机构,91-支撑立板,92-定位放置板,93-限位框,94-氧气储存筒,95-增压泵,96-伸缩软管,97-充气压板,98-压力管,99-伸缩推杆,10-下料机构,101-下料箱,102-光电传感器,103-电动推杆,104-活动转块,105-密闭活塞,106-第一压力传感器,11-间隔上料机构,111-分料滚筒,112-定位横轴,113-复位短柱,114-联动横杆,115-固定底板,116-定位横杆,117-铰接短杆,118-受力短柱,119-限位环,1110-卡位短柱,12-夹紧机构,121-驱动齿条,122-导向轨,123-换向齿轮,124-从动齿条,125-夹紧顶板,126-定位导柱,13-缓冲机构,131-缓冲海绵块,132-缓冲底板,133-缓冲短柱,14-挡料机构,141-伸缩电磁阀,142-挡料板,143-第二压力传感器,144-倾斜架。
具体实施方式
34.以下结合具体实施例对上述方案做进一步说明。应理解,这些实施例是用于说明本技术而不限于限制本技术的范围。实施例中采用的实施条件可以根据具体厂家的条件做进一步调整,未注明的实施条件通常为常规实验中的条件。
35.实施例1一种医院供应科室用氧气罐批量充气装置,如图1-图8所示,包括有密闭箱体1、支撑底座2、支撑立柱3、散热窗4、启动按钮51、停止按钮52、支撑架6、储罐箱7、上料板71、定位杆72、保护罩8、充气机构9和下料机构10,支撑底座2顶部右侧前后对称固接有支撑立柱3,前后两侧支撑立柱3顶端与支撑底座2顶部左侧之间固接有密闭箱体1,密闭箱体1上部嵌入式设有散热窗4,密闭箱体1外前侧面右上部固接有启动按钮51,密闭箱体1外前侧面右上部固接有停止按钮52,停止按钮52位于启动按钮51右侧,密闭箱体1内右侧面下部前后对称固接有支撑架6,密闭箱体1上部左侧设有储罐箱7,储罐箱7下部设有上料板71,储罐箱7外右侧面下前部设有定位杆72,前后两侧支撑架6上部之间设有保护罩8,密闭箱体1上设有充气机构9,充气机构9与密闭箱体1之间设有下料机构10。
36.充气机构9包括有支撑立板91、定位放置板92、限位框93、氧气储存筒94、增压泵95、伸缩软管96、充气压板97、压力管98和伸缩推杆99,密闭箱体1内底部中侧左右对称固接有支撑立板91,左右两侧支撑立板91上部转动式设有定位放置板92,定位放置板92前部设有限位框93,密闭箱体1内底部后侧固接有氧气储存筒94,氧气储存筒94顶部设有增压泵95并连通,定位放置板92上滑动式设有充气压板97,充气压板97与增压泵95之间设有伸缩软管96并连通,充气压板97左部设有压力管98,压力管98与伸缩软管96连通,定位放置板92内下部设有伸缩推杆99,伸缩推杆99与充气压板97固定连接。
37.下料机构10包括有下料箱101、光电传感器102、电动推杆103、活动转块104、密闭活塞105和第一压力传感器106,密闭箱体1内底部前侧设有下料箱101,下料箱101内左侧面上部设有光电传感器102,左右两侧支撑立板91下部之间设有电动推杆103,电动推杆103上连接有活动转块104,活动转块104与定位放置板92前部下侧转动连接,伸缩软管96左部滑动式设有密闭活塞105,伸缩软管96左部设有第一压力传感器106。
38.人们按下电源总开关,将本装置上电,光电传感器102与第一压力传感器106开始工作,首先操作人员将三个氧气罐放置在定位放置板92上,按动启动按钮51一次,启动按钮51发出信号,控制模块接收信号后控制伸缩推杆99收缩3秒,伸缩推杆99收缩带动充气压板97向前移动,充气压板97向前移动与氧气罐接触,3秒后控制模块控制伸缩推杆99关闭,且控制模块还控制增压泵95工作,增压泵95通过伸缩软管96对收集进行充气,人们可观察压力管98数值了解充气情况,如氧气罐内装满适量氧气,伸缩软管96内压强增大使得密闭活塞105向左移动,密闭活塞105向左移动与第一压力传感器106接触,第一压力传感器106发出信号,控制模块接收信号后控制增压泵95停止,再按动停止按钮52一次,停止按钮52发出信号,控制模块接收信号后控制伸缩推杆99伸长3秒,伸缩推杆99收缩带动充气压板97向后移动复位,3秒后,控制模块控制伸缩推杆99停止,且控制模块还控制电动推杆103收缩,电动推杆103收缩带动活动转块104向下移动,活动转块104向下移动带动定位放置板92向下摆动,氧气罐也就滑落至下料箱101内,进而氧气罐阻挡光电传感器102光线传播路经,光电传感器102发出信号,控制模块接收信号后控制电动推杆103伸长3秒,电动推杆103也就通过活动转块104带动定位放置板92向上摆动复位,3秒后,控制模块控制电动推杆103停止,人们即可取出氧气罐进行后续处理。
39.实施例2在实施例1的基础之上,如图9-12所示,还包括有间隔上料机构11,间隔上料机构11包括有分料滚筒111、定位横轴112、复位短柱113、联动横杆114、固定底板115、定位横杆116、铰接短杆117、受力短柱118、限位环119和卡位短柱1110,保护罩8中部转动式设有定位横轴112,定位横轴112中部周向固接有分料滚筒111,保护罩8内底部左侧间隔设有复位短柱113,左右两侧复位短柱113之间滑动式设有联动横杆114,上料板71底部中侧固接有固定底板115,固定底板115下部转动式设有定位横杆116,定位横杆116前后两侧都固接有铰接短杆117,铰接短杆117与联动横杆114转动连接,联动横杆114左部转动式设有受力短柱118,联动横杆114右部设有卡位短柱1110,定位横轴112前后两侧周向都固接有限位环119,限位环119与卡位短柱1110配合。
40.还包括有夹紧机构12,夹紧机构12包括有驱动齿条121、导向轨122、换向齿轮123、从动齿条124、夹紧顶板125和定位导柱126,定位放置板92左侧面固接有导向轨122,导向轨122内滑动式设有驱动齿条121,驱动齿条121与充气压板97固定连接,定位放置板92左部后侧转动式设有换向齿轮123,换向齿轮123与驱动齿条121啮合,导向轨122后部滑动式设有从动齿条124,从动齿条124与换向齿轮123啮合,定位放置板92顶部前侧左右对称固接有定位导柱126,左右两侧定位导柱126之间滑动式设有夹紧顶板125,夹紧顶板125与从动齿条124固定连接。
41.初始时,储罐箱7内装有适量的氧气罐,一个氧气罐位于分料滚筒111左侧,分料滚筒111对剩余氧气罐限位,因重力的作用,氧气罐沿上料板71向下滚动,氧气罐与受力短柱
118接触,氧气罐使得受力短柱118向下移动,受力短柱118向下移动通过铰接短杆117带动联动横杆114向下移动,联动横杆114向下移动带动卡位短柱1110向下移动,卡位短柱1110向下移动与限位环119脱离,卡位短柱1110停止对限位环119限位,分料滚筒111停止对剩余氧气罐限位,前一个滚至定位放置板92上与受力短柱118脱离,联动横杆114通过复位短柱113带动受力短柱118向上移动复位,进而下一个氧气罐随着沿上料板71向下滚动,如此反复,可不断进行下料。如定位放置板92上放置有三个氧气罐,人们利用木板对储罐箱7挡住即可,如此,可方便人们进行上料。
42.当人们按动启动按钮51一次,启动按钮51发出信号,控制模块接收信号后控制伸缩推杆99收缩3秒,充气压板97向前移动还带动驱动齿条121向前移动,驱动齿条121向前移动带动换向齿轮123正转,换向齿轮123正转带动从动齿条124向下移动,从动齿条124向下移动带动夹紧顶板125向下移动,夹紧顶板125向下移动对氧气罐限位,3秒后,控制模块控制伸缩推杆99停止,如氧气罐内装满适量氧气,再按动停止按钮52一次,停止按钮52发出信号,控制模块接收信号后控制伸缩推杆99伸长3秒,充气压板97带动驱动齿条121向后移动复位,夹紧顶板125也就向上移动复位停止对氧气罐限位,3秒后,控制模块控制伸缩推杆99停止,如此,可避免充气时氧气罐产生晃动。
43.实施例3在实施例1和实施例2的基础之上,如图13-图15所示,还包括有缓冲机构13,缓冲机构13包括有缓冲海绵块131、缓冲底板132和缓冲短柱133,下料箱101内后侧面固接有缓冲海绵块131,下料箱101内底部左右对称固接有缓冲短柱133,左右两侧缓冲短柱133之间滑动式设有缓冲底板132。
44.还包括有挡料机构14,挡料机构14包括有伸缩电磁阀141、挡料板142、第二压力传感器143和倾斜架144,上料板71底部右部下侧设有伸缩电磁阀141,伸缩电磁阀141上连接有挡料板142,定位放置板92内前部左侧设有第二压力传感器143,定位放置板92内左部前侧铰接式设有倾斜架144。
45.当氧气罐也就滑落至下料箱101内时,缓冲底板132通过缓冲短柱133对氧气罐起到缓冲,缓冲海绵块131也对氧气罐进行保护,如此,可避免滑落至下料箱101内时产生破损。
46.当氧气罐滚至定位放置板92最左侧时,氧气罐与倾斜架144接触,氧气罐滚使得倾斜架144左部向下摆动呈倾斜状态,进而下一个氧气罐随着滚至定位放置板92中部,两个氧气罐配合使得倾斜架144向下移动,倾斜架144向下移动与压力传感器接触,压力传感器发出信号,控制模块接收信号后控制伸缩电磁阀141伸长,伸缩电磁阀141带动挡料板142向上移动,挡料板142向上移动对剩余氧气罐进行限位,如氧气罐内装满适量氧气,再按动停止按钮52一次,停止按钮52发出信号,控制模块接收信号后控制电动推杆103收缩,氧气罐也就滑落至下料箱101内,氧气罐阻挡光电传感器102光线传播路经,光电传感器102发出信号,控制模块接收信号后控制电动推杆103伸长3秒,电动推杆103也就通过活动转块104带动定位放置板92向上摆动复位,3秒后,控制模块控制电动推杆103停止和伸缩电磁阀141收缩复位,挡料板142也就向下移动复位停止对剩余氧气罐进行限位,如此,无需人们手动将剩余氧气罐挡住。
47.如图1、图16和图17所示,还包括有电控箱5,电控箱5安装于密闭箱体1右部下中
侧,电控箱5内包括有开关电源、电源模块和控制模块,开关电源为整个设备供电,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;启动按钮51、停止按钮52、第一压力传感器106、第二压力传感器143和光电传感器102都与控制模块通过电性连接;增压泵95、伸缩电磁阀141、电动推杆103和伸缩推杆99都与控制模块通过外围电路连接。
48.应理解,该实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本技术所附权利要求书所限定的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1