一种自适应真空吸盘
1.本发明涉及一种自适应真空吸盘,属于真空吸盘技术领域。
背景技术:
2.真空吸盘是日常生活中常见的吸附工具,其可以很轻松地吸附于光滑桌面、瓷砖等光滑物体表面。此外,基于真空吸盘清洁卫生、不易造成工件损坏等优点,真空吸盘在工业生活中也起着日益重要的作用。但随着真空吸盘的应用领域不断扩大,特别是爬壁机器人技术的出现与发展,真空吸盘在粗糙表面的漏气问题、吸取失败问题已经成为真空吸附领域的一个难题。
3.因此,如何提供一种能够稳定吸附于粗糙物体表面的真空吸盘是本领域技术人员亟需解决的问题。
技术实现要素:
4.本发明所要解决的技术问题是提供一种自适应真空吸盘,结构简单,能够稳定吸附于粗糙物体表面。
5.本发明解决上述技术问题的技术方案如下:一种自适应真空吸盘,与抽气泵连通,包括吸盘本体和多个可受压变形的弹性密封块,所述吸盘本体顶部开设一抽气口,所述抽气泵与所述抽气口连通,多个所述弹性密封块环形间隔排列布置形成多个直径不同的圆环密封带,多个所述圆环密封带均固定在所述吸盘本体内顶面并围绕所述抽气口呈同心圆布置,相邻两个所述圆环密封带之间的间隙为30~50μm,同一所述圆环密封带中相邻两个所述弹性密封块之间的间隙为30~50μm,相邻两个所述圆环密封带中对应的两个所述弹性密封块错位布置。
6.本发明的有益效果是:多个圆环密封带和吸盘本体形成吸附腔,工作时,圆环密封腔与待吸附的粗糙表面挤压,弹性密封块受压变形,相邻两个圆环密封带之间的间隙和同一圆环密封带中相邻两个弹性密封块之间的间隙能够给弹性密封块提供向周围变形扩展的空间,增大每个弹性密封块的形变量,使得弹性密封块与粗糙表面贴合更加紧密,增强整个圆环密封带与待吸附的粗糙表面之间的密封效果,提高吸附的稳定性,每个间隙大小为30~50μm密封效果最好;相邻的弹性密封块之间挤压填充满间隙,相邻两个圆环密封带中对应的两个弹性密封块错位布置,形成交错纵横的网格状缝隙,提高密封效果,抽气泵通过抽气孔将吸附腔中的空气吸出,使得吸附腔内近似真空状态,能够将待吸附物吸起,结构简单,能够稳定吸附于粗糙物体表面。
7.在上述技术方案的基础上,本发明还可以做如下改进。
8.进一步,多个所述圆环密封带靠近所述吸盘本体外周布置,多个所述圆环密封带的总宽度占所述吸盘本体直径的六分之一。
9.采用上述进一步方案的有益效果是:多个圆环密封带的总宽度占吸盘本体直径的六分之一,保证吸盘本体与环形密封带之间形成大体积的空腔,提高吸附强度。
10.进一步,所述弹性密封块横截面为扇环形,所述扇环形的周长为2~4mm。
11.采用上述进一步方案的有益效果是:扇环形的周长为2~4mm,每个弹性密封块的体积为亚毫米级,体积小,更容易填补粗糙表面的凹坑,与粗糙表面紧密贴合,提高密封效果。
12.进一步,所述弹性密封块的厚度为100~200μm。
13.采用上述进一步方案的有益效果是:弹性密封块的厚度为100~200μm,密封效果好。
14.进一步,还包括多个用于填充粗糙表面凹坑的弹性毛状体,多个所述弹性毛状体均包括嵌入端和工作端,多个所述嵌入端穿过所述弹性密封块嵌入所述吸盘本体内,多个所述嵌入端均垂直于所述吸盘本体内顶面,多个所述工作端位于所述弹性密封块远离所述吸盘本体的一面。
15.采用上述进一步方案的有益效果是:工作端位于弹性密封块远离吸盘本体的一面,弹性毛状体能够自适应填充至粗糙表面凹坑,提高粗糙表面的平整度,提高弹性密封块与粗糙表面的密封效果;多个嵌入端均垂直于吸盘本体内顶面,方便填充粗糙表面的凹坑,提高弹毛状体填充至粗糙表面凹坑效果。
16.进一步,一个所述弹性密封块上的多个所述弹性毛状体之间的间隙为10~20μm。
17.采用上述进一步方案的有益效果是:间隙为10~20μm使得一个弹性密封块上能够布置大量的弹性毛状体,提高密封效果。
18.进一步,所述嵌入端为圆柱状,所述工作端为圆锥状,所述嵌入端的直径为5~15μm。
19.采用上述进一步方案的有益效果是:嵌入端为圆柱状,提高固定在吸盘本体上的牢固度;工作端为圆锥状,方便填充粗糙表面的凹坑,提高弹毛状体填充至粗糙表面凹坑效果,且能够伸入待吸附物表面缝隙中,对待吸附物产生拉力,提高吸盘与待吸附物的牢固度;嵌入端的直径为5~15μm,使得一个弹性密封块上能够布置大量的弹性毛状体,提高密封效果。
20.进一步,所述工作端端头高于所述弹性密封块远离所述吸盘本体的一面30~70μm。
21.采用上述进一步方案的有益效果是:工作端端头高于弹性密封块远离吸盘本体的一面30~70μm,弹性毛状体填充粗糙表面凹坑的效果好,提高密封效果。
22.进一步,所述弹性密封块和所述弹性毛状体的材料为形状记忆高分子材料,所述吸盘本体通过3d打印加工完成。
23.采用上述进一步方案的有益效果是:弹性密封块和弹性毛状体的材料为形状记忆高分子材料,受压易变形,与粗糙表面贴合效果好,提高密封效果;撤去压力后能够回复原状,方便循环使用;3d打印加工效率高。
24.进一步,还包括抽气管,所述抽气管与所述抽气口连通,所述抽气管外壁固定设置有一凸缘,所述凸缘上固定设置有多个环状凸起,所述凸缘和所述环状凸起用于与所述吸盘本体卡接。
25.采用上述进一步方案的有益效果是:设置抽气管方便与抽气泵连通;抽气管外壁固定设置有一凸缘,凸缘上固定设置有多个环状凸起,提高与吸盘本体连接的牢固度。
附图说明
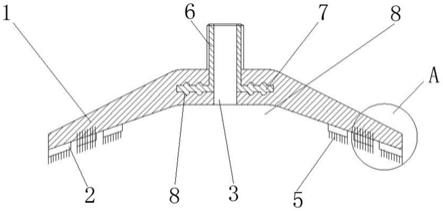
26.图1为本发明一种自适应真空吸盘剖视图;
27.图2为图1中a部分的局部放大图;
28.图3为本发明一种自适应真空吸盘与粗糙表面接触面的放大图;
29.图4为本发明一种自适应真空吸盘仰视图;
30.图5为本发明一种自适应真空吸盘中圆环密封带结构示意图;
31.图6为本发明一种自适应真空吸盘的结构示意图。
32.附图中,各标号所代表的部件列表如下:
33.1-吸盘本体、2-弹性密封块、3-抽气口、4-圆环密封带、5-弹性毛状体、501-嵌入端、502-工作端、6-抽气管、7-凸缘、8-环状凸起、9-吸附腔、10-粗糙表面。
具体实施方式
34.以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
35.本发明的目的是提供一种自适应真空吸盘,以解决现有技术存在的问题,结构简单,成本低并且检测效率高。
36.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
37.本发明提供一种自适应真空吸盘,本发明一具体实施例中,如图1~6所示,与抽气泵连通,包括吸盘本体1和多个可受压变形的弹性密封块2,吸盘本体顶部开设一抽气口3,抽气泵与抽气口3连通,多个弹性密封块2环形间隔排列布置形成多个直径不同的圆环密封带4,多个圆环密封带4均固定在吸盘本体1内顶面并围绕抽气口3呈同心圆布置,相邻两个圆环密封带4之间的间隙为30~50μm,同一圆环密封带4中相邻两个弹性密封块2之间的间隙为30~50μm,相邻两个圆环密封带4中对应的两个弹性密封块2错位布置。
38.本发明提供一种自适应真空吸盘,多个圆环密封带4和吸盘本体1形成吸附腔9,工作时,圆环密封腔与待吸附的粗糙表面10挤压,弹性密封块2受压变形,相邻两个圆环密封带4之间的间隙和同一圆环密封带4中相邻两个弹性密封块2之间的间隙能够给弹性密封块2提供向周围变形扩展的空间,增大每个弹性密封块2的形变量,使得弹性密封块2与粗糙表面10贴合更加紧密,增强整个圆环密封带4与待吸附的粗糙表面10之间的密封效果,提高吸附的稳定性,每个间隙大小为30~50μm密封效果最好;相邻的弹性密封块2之间挤压填充满间隙,相邻两个圆环密封带4中对应的两个弹性密封块2错位布置,形成交错纵横的网格状缝隙,提高密封效果,抽气泵通过抽气孔将吸附腔9中的空气吸出,使得吸附腔9内近似真空状态,能够将待吸附物吸起,结构简单,能够稳定吸附于粗糙物体表面。
39.具体的,弹性密封体通过在吸盘本体1内顶面上浇筑一体成型,再通过激光打标机将其分割成单独的弹性密封块2,制作方法简单有效,通过机关打标机能够精准的控制弹性密封块2之间的间隙;优选的,间隙大小为30μm。
40.本发明一具体实施例中,多个圆环密封带4靠近吸盘本体1外周布置,多个圆环密封带4的总宽度占吸盘本体1直径的六分之一;多个圆环密封带4的总宽度占吸盘本体1直径的六分之一,保证吸盘本体1与环形密封带之间形成大体积的空腔,提高吸附强度。
41.本发明一具体实施例中,弹性密封块2横截面为扇环形,扇环形的周长为2~4mm;扇环形的周长为2~4mm,每个弹性密封块2的体积为亚毫米级,体积小,更容易填补粗糙表面10的凹坑,与粗糙表面10紧密贴合,提高密封效果;优选的,扇环形的周长为2mm。
42.本发明一具体实施例中,弹性密封块2的厚度为100~200μm;弹性密封块2的厚度为100~200μm,密封效果好。
43.本发明一具体实施例中,还包括多个用于填充粗糙表面10凹坑的弹性毛状体5,多个弹性毛状体5均包括嵌入端501和工作端502,多个嵌入端501穿过弹性密封块2嵌入吸盘本体1内,多个嵌入端501均垂直于吸盘本体1内顶面,多个工作端502位于弹性密封块2远离吸盘本体1的一面;优选的,弹性密封块2的厚度为150mm。
44.工作端502位于弹性密封块2远离吸盘本体1的一面,弹性毛状体5能够自适应填充至粗糙表面10凹坑,提高粗糙表面10的平整度,提高弹性密封块2与粗糙表面10的密封效果;多个嵌入端501均垂直于吸盘本体1内顶面,方便填充粗糙表面10的凹坑,提高弹毛状体填充至粗糙表面10凹坑效果。
45.本发明一具体实施例中,一个弹性密封块2上的多个弹性毛状体5之间的间隙为10~20μm;间隙为10~20μm使得一个弹性密封块2上能够布置大量的弹性毛状体5,提高密封效果;优选的,弹性毛状体5之间的间隙为15μm。
46.本发明一具体实施例中,嵌入端501为圆柱状,工作端502为圆锥状,嵌入端501的直径为5~15μm。
47.嵌入端501为圆柱状,提高固定在吸盘本体1上的牢固度;工作端502为圆锥状,方便填充粗糙表面10的凹坑,提高弹毛状体填充至粗糙表面10凹坑效果,且能够伸入待吸附物表面缝隙中,对待吸附物产生拉力,提高吸盘与待吸附物的牢固度;嵌入端501的直径为5~15μm,使得一个弹性密封块2上能够布置大量的弹性毛状体5,提高密封效果,优选的,嵌入端501的直径为10μm。
48.本发明一具体实施例中,工作端502端头高于弹性密封块2远离吸盘本体1的一面30~70μm;工作端502端头高于弹性密封块2远离吸盘本体1的一面30~70μm,弹性毛状体5填充粗糙表面10凹坑的效果好,提高密封效果,优选的,工作端502端头高于弹性密封块2远离吸盘本体1的一面50μm。
49.本发明一具体实施例中,弹性密封块2和弹性毛状体5的材料为形状记忆高分子材料,吸盘本体1通过3d打印加工完成。
50.弹性密封块2和弹性毛状体5的材料为形状记忆高分子材料,受压易变形,与粗糙表面10贴合效果好,提高密封效果;撤去压力后能够回复原状,方便循环使用;3d打印加工效率高。
51.具体的,通过3d打印制作吸盘本体1,制作过程中将弹性毛状体5的嵌入端501垂直固定在吸盘本体1上,再继续通过3d打印制作吸盘本体1,使得弹性毛状体5的嵌入端501嵌入吸盘本体1内,与吸盘本体1形成一个整体;在具有弹性毛状体5区域的吸盘本体1上浇筑,形成弹性密封体,再通过激光打标机将其分割成单独的弹性密封块2,使得吸盘本体1、弹性密封块2和弹性毛状体5连接牢固,整体性强,耐久性好,使用寿命长;优选的,形状记忆高分子为聚氨酯材料。
52.本发明一具体实施例中,还包括抽气管6,抽气管6与抽气口3连通,抽气管6外壁固
定设置有一凸缘7,凸缘7上固定设置有多个环状凸起8,凸缘7和环状凸起8用于与吸盘本体1卡接。
53.设置抽气管6方便与抽气泵连通;抽气管6外壁固定设置有一凸缘7,凸缘7上固定设置有多个环状凸起8,提高与吸盘本体1连接的牢固度。
54.具体的,通过3d打印制作吸盘本体1过程中,将凸缘7卡在吸盘本体1上,再继续制作吸盘本体1,使凸缘7卡接在吸盘本体1上,结构简单,制作方便,连接牢固,使用寿命长。
55.一种自适应真空吸盘制作过程和工作过程的具体实施例:
56.首先通过3d打印技术加工吸盘本体1,再顶部加工出一卡接槽,将抽气管6上的凸缘7卡接在卡接槽内,继续加工,将凸缘7整体固定在吸盘本体1内,进而将抽气管6固定在吸盘本体1上;加工吸盘本体1内顶面时,将多个弹性毛状体5的嵌入端501垂直固定在吸盘本体1内顶面,继续加工,使得弹性毛状体5的嵌入端501嵌入吸盘本体1内,与吸盘本体1形成一个整体;在具有弹性毛状体5区域的吸盘本体1上浇筑,形成弹性密封体,再通过激光打标机将其分割成间隙为30μm的弹性密封块2,吸盘本体1、弹性密封块2和弹性毛状体5通过上述加工方式制备连接牢固,整体性强,耐久性好,使用寿命长;
57.将制备完成的自适应真空吸盘上的抽气管6与抽气泵连通,并将抽气管6固定在机械手臂等移动设备上,控制自适应真空吸盘压在带吸附物表面,圆环密封腔与待吸附的粗糙表面10挤压,弹性密封块2受压变形,相邻两个圆环密封带4之间的间隙和同一圆环密封带4中相邻两个弹性密封块2之间的间隙能够给弹性密封块2提供向周围变形扩展的空间,增大每个弹性密封块2的形变量,使得弹性密封块2与粗糙表面10贴合更加紧密,增强整个圆环密封带4与待吸附的粗糙表面10之间的密封效果,提高吸附的稳定性;间隙大小为30μm,密封效果最好;相邻两个圆环密封带4中对应的两个弹性密封块2错位布置,形成交错纵横的网格状缝隙,提高密封效果,抽气泵通过抽气孔将吸附腔9中的空气吸出,使得吸附腔9内近似真空状态,将待吸附物吸起。
58.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1