一种履带巡检管道机器人的制作方法
1.本实用新型涉及管道巡检机器人技术领域,特别涉及一种履带巡检管道机器人。
背景技术:
2.履带式设计装置专为崎岖路面等恶劣况下使用,越障能力更强,可在石油生产区、矿区井下等场景中开展巡检、危险爆炸物处理等作业。
3.在民生领域,如自来水、供气、供油等,管道是很常用的传输形式,而管道在使用中,因不同原因造成管道堵塞和管道损伤,易造成供水污染、供气供油泄露引发危险,如何有效检测这些管道堵塞和损伤防止其次生灾害是摆在管理人员面前的重要问题。另一旦发生突发事故,在调查阶段,管道排查成为了一大难题。
4.但是,供水供气供油公司总厂引出的总管至各区域的中型管道,铺设范围大、管道上建筑物复杂,一般要求深埋,要求精确确定堵塞和损伤位置,避免无目标无谓开挖,造成重大民生损失;且各城市市政也要求在日常维护中,对这些总管和中型管道进行预防监测,以实时监控管道内情况。
5.现有技术中已有多种对这些总管和中型管道进行管内检测的机器人,其中有轮式的,也有履带式的。
6.其中轮式机器人由于前后轮之间空隙原因,易被管道内障碍物卡住,并且行进中爬坡能力有限。
7.目前履带巡检管道机器人功能较为单一,以管道内部情况拍摄为主,在管道污染泄露的预防、突发污染事件调查时,不能满足检测要求,因此需要一种集多功能于一体的履带巡检管道机器人。
技术实现要素:
8.实用新型一种履带巡检管道机器人,采用搭载伸缩式检测装置,满足管道机器人作业功能的多样性,提高管道检测效率。
9.为实现上述目的,本实用新型提供如下技术方案:一种履带巡检管道机器人,包括履带车主体以及控制履带巡检管道机器人可移动的控制终端和固定设置在室内的控制中心,所述履带车主体上设有两个履带轮,在履带车主体内设有用于驱动履带轮转动的驱动电机以及为驱动电机提供电源的蓄电池;
10.在履带车主体的顶端中心处设有电控箱,在电控箱的内部设有存储卡、给予履带巡检管道机器人定位的定位仪以及控制整个履带巡检管道机器人的单片机、其中蓄电池电连接单片机,在电控箱的内部设有可伸缩的检测设备;
11.在履带车主体沿着长度方向顶端位于电控箱的两侧分别设有挖土设备以及线缆牵引设备;
12.在履带车主体沿着宽度方向顶端位于电控箱的两端均设有监控照明设备。
13.作为本实用新型优选的方案,所述电控箱通过螺栓固定在履带车主体的顶端,所
述电控箱包括箱体,在箱体的侧壁上设有可调节的无线收发天线,其中无线收发天线与控制终端以及控制中心无线连接,所述箱体顶端的中心处设有供检测设备通过的避让槽。
14.作为本实用新型优选的方案,所述无线收发天线与控制终端之间通过蓝牙或者无线网络连接,所述无线收发天线与控制中心之间通过//无线网络无线连接。
15.作为本实用新型优选的方案,所述检测设备包括第四电动伸缩杆以及检测箱,所述第四电动伸缩杆设置在箱体内部,所述第四电动伸缩杆的顶端设有底板,底板的顶端四个拐角处设有支撑杆,在四个支撑杆的顶端之间设有顶板,其检测箱设置在顶板和底板之间,在检测箱一侧侧壁上设有显示屏,在检测箱另一侧侧壁上分别设有温度传感器、水质监测器以及湿度传感器,其中单片机分别与显示屏、第四电动伸缩杆、温度传感器、水质监测器以及湿度传感器电连接。
16.作为本实用新型优选的方案,所述挖土设备包括设置在履带车主体上的第一卡槽,在第一卡槽内卡固连接有第一电机,在第一电机顶端的输出端设有第一转盘,位于第一转盘顶端中心处设有第一机械臂,在第一转盘且位于第一机械臂的两侧均设有两个第一电动伸缩杆,其中一侧两个第一电动伸缩杆顶端之间设有第一补光灯,另一侧两个第一电动伸缩杆顶端之间设有第一监控摄像头,在第一补光灯和第一监控摄像头外均设有第一保护罩,每个所述第一保护罩与第一电动伸缩杆之间均通过螺栓固定,每个第一电动伸缩杆与第一转盘之间固定连接,在第一机械臂的另一端设有挖斗,在履带车主体靠近挖土设备的一侧侧壁上设有装土箱,在装土箱顶端设有电控翻转的盖子,在其装土箱的内部设有若干个装土小方格。
17.作为本实用新型优选的方案,所述第一电机、第一电动伸缩杆、第一补光灯、第一监控摄像头、电控翻转盖子的内部控制部件以及控制第一机械臂上的控制部件分别与单片机电连接。
18.作为本实用新型优选的方案,所述线缆牵引设备包括设置在履带车主体上的第二卡槽,在第二卡槽内卡固连接有第二电机,在第二电机顶端的输出端设有第二转盘,位于第二转盘顶端中心处设有第二机械臂,在第二转盘且位于第二机械臂的两侧均设有两个第二电动伸缩杆,其中一侧两个第二电动伸缩杆顶端之间设有第二补光灯,另一侧两个第二电动伸缩杆顶端之间设有第二监控摄像头,在第二补光灯和第二监控摄像头外均设有第二保护罩,每个所述第二保护罩与第二电动伸缩杆之间均通过螺栓固定,每个第二电动伸缩杆与第二转盘之间固定连接,在第二机械臂的另一端设有用于夹住线缆的电控机械爪,在电控机械爪上设有用于给电控机械爪监控的观察定位摄像头。
19.作为本实用新型优选的方案,所述第二电机、第二电动伸缩杆、第二补光灯、第二监控摄像头、观察定位摄像头、电控机械爪以及用于控制第二机械臂驱动的部件分别与单片机之间电连接。
20.作为本实用新型优选的方案,两个所述监控照明设备包括在履带车主体顶端固定设置的第三电动伸缩杆,每个第三电动伸缩杆的顶端均设有电控调节座,在电控调节座的顶端设有通过螺栓固定且一面开口的第三保护罩,每个所述第三保护罩的内部设有设备壳体,在每个设备壳体位于第三保护罩开口的一侧中心处设有监控摄像头,在监控摄像头的四周设有灯,其中单片机分别与第三电动伸缩杆、电控调节座、监控摄像头以及灯电连接。
21.作为本实用新型优选的方案,所述单片机与存储卡、定位仪以及无线收发天线电
连接。
22.有益效果:本实用新型在使用时,通过设置挖斗,可以在管道内作业时使用挖斗提取管道内的泥土样本进行检测,同时也可以排出管道内的淤泥,本实用新型通过设置机械爪,使得其不仅可以牵引电缆线,同时可以代替人工对管道内进行一些常规的作业,本实用新型车体内均采用防水设计,可以进行水下作业,同时配备温度传感器、水质检测器以及湿度传感器,对管道内进行温度、湿度以及对水质的检测,真正意义上做到了一车多用的功能。
附图说明
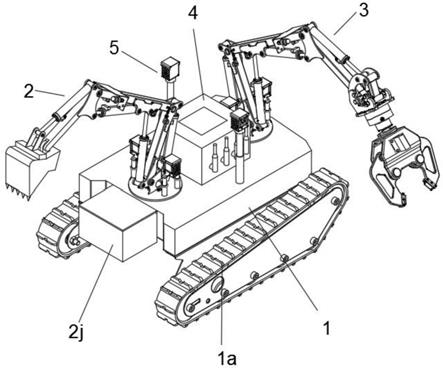
23.图1为本实用新型一种履带巡检管道机器人的立体图;
24.图2为本实用新型一种履带巡检管道机器人的局部立体图;
25.图3为本实用新型一种履带巡检管道机器人的检测设备立体图;
26.图4为本实用新型一种履带巡检管道机器人的挖斗立体图;
27.图5为本实用新型一种履带巡检管道机器人的机械爪立体图;
28.图6为本实用新型一种履带巡检管道机器人的摄像照明设备立体图;
29.图7为本实用新型一种履带巡检管道机器人的系统框图。
30.附图标记说明如下:
31.图中:1、履带车主体;1a、履带轮;1b、驱动电机;1c、蓄电池;2、挖土设备;2a、第一卡槽;2b、第一电机;2c、第一转盘;2d、第一电动伸缩杆;2e、第一补光灯;2f、第一监控摄像头;2g、第一机械臂;2h、挖斗; 2i、第一保护罩;2j、装土箱;3、线缆牵引设备;3a、第二卡槽;3b、第二电机;3c、第二转盘;3d、第二电动伸缩杆;3e、第二补光灯;3f、第二监控摄像头;3g、第二机械臂;3h、电控机械爪;3i、观察定位摄像头;3j、第二保护罩;4、电控箱;4a、箱体;4b、无线收发天线;4c、避让槽;4e、 gps定位仪;4f、单片机;4g、存储卡;5、摄像照明设备;5a、第三电动伸缩杆;5b、电控调节座;5c、第三保护罩;5d、设备壳;5e、led灯;5f、监控摄像头;6、检测设备;6a、第四电动伸缩杆;6b、检测箱;6c、顶板;6d、底板;6e、支撑杆;6f、显示屏;6g、温度传感器;6h、水质检测器;6i、湿度传感器;7、控制终端;8、控制中心。
具体实施方式
32.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例,基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
33.为了便于理解本实用新型,下面将参照相关附图对本实用新型进行更全面的描述。附图中给出了本实用新型的若干实施例。但是,本实用新型可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本实用新型的公开内容更加透彻全面。
34.需要说明的是,当元件被称为“固设于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
35.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
36.请参阅图1-7,本实用新型提供一种技术方案:一种履带巡检管道机器人,包括履带车主体1以及控制履带巡检管道机器人可移动的控制终端7和固定设置在室内的控制中心8,所述履带车主体1上设有两个履带轮1a,在履带车主体1内设有用于驱动履带轮1a转动的驱动电机1b以及为驱动电机1b提供电源的蓄电池1c;
37.在履带车主体1的顶端中心处设有电控箱4,在电控箱4的内部设有存储卡4g、给予履带巡检管道机器人定位的gps定位仪4e以及控制整个履带巡检管道机器人的单片机4f、其中蓄电池1c电连接单片机4f,在电控箱4的内部设有可伸缩的检测设备6;
38.在履带车主体1沿着长度方向顶端位于电控箱4的两侧分别设有挖土设备2以及线缆牵引设备3;
39.在履带车主体1沿着宽度方向顶端位于电控箱4的两端均设有监控照明设备5。
40.实施例,请参照图1、2和7,所述电控箱4通过螺栓固定在履带车主体 1的顶端,所述电控箱4包括箱体4a,在箱体4a的侧壁上设有可调节的无线收发天线4b,其中无线收发天线4b与控制终端7以及控制中心8无线连接,所述箱体4a顶端的中心处设有供检测设备6通过的避让槽4c,所述无线收发天线4b与控制终端7之间通过蓝牙或者nfc无线网络连接,所述无线收发天线4b与控制中心8之间通过3g/4g/gprs无线网络无线连接,通过设置无线收发天线4b与控制终端以及控制中心无线连接,使得其在管道附近内无线控制,而且还能通过固定的控制中心实时监控,实时将检测得到的数据进行分析,非常实用。
41.实施例,请参照图1、3和7,所述检测设备6包括第四电动伸缩杆6a以及检测箱6b,所述第四电动伸缩杆6a设置在箱体4a内部,所述第四电动伸缩杆6a的顶端设有底板6d,底板6d的顶端四个拐角处设有支撑杆6e,在四个支撑杆6e的顶端之间设有顶板6c,其检测箱6b设置在顶板6c和底板6d 之间,在检测箱6b一侧侧壁上设有显示屏6f,在检测箱6b另一侧侧壁上分别设有温度传感器6g、水质监测器6h以及湿度传感器6i,其中单片机4f分别与显示屏6f、第四电动伸缩杆6a、温度传感器6g、水质监测器6h以及湿度传感器6i电连接。
42.实施例,请参照图1、4和7,所述挖土设备2包括设置在履带车主体1 上的第一卡槽2a,在第一卡槽2a内卡固连接有第一电机2b,在第一电机2b 顶端的输出端设有第一转盘2c,位于第一转盘2c顶端中心处设有第一机械臂 2g,在第一转盘2c且位于第一机械臂2g的两侧均设有两个第一电动伸缩杆 2d,其中一侧两个第一电动伸缩杆2d顶端之间设有第一补光灯2e,另一侧两个第一电动伸缩杆2d顶端之间设有第一监控摄像头2f,在第一补光灯2e和第一监控摄像头2f外均设有第一保护罩2i,每个所述第一保护罩2i与第一电动伸缩杆2d之间均通过螺栓固定,每个第一电动伸缩杆2d与第一转盘2c 之间固定连接,在第一机械臂2g的另一端设有挖斗2h,在履带车主体1靠近挖土设备2的一侧侧壁上设有装土箱2j,在装土箱2j顶端设有电控翻转的盖子,在其装土箱2j的内部设有若干个装土小方格,所述第一电机2b、第一电动伸缩杆2d、第一补光灯2e、第一监控摄像头2f、电控翻转盖子的内部控制部件以及控制第一机械臂2g上的控制部件分别与单片机4f电连接。
43.实施例,请参照图1、5和7,所述线缆牵引设备3包括设置在履带车主体1上的第二卡槽3a,在第二卡槽3a内卡固连接有第二电机3b,在第二电机3b顶端的输出端设有第二转盘3c,位于第二转盘3c顶端中心处设有第二机械臂3g,在第二转盘3c且位于第二机械臂3g的两侧均设有两个第二电动伸缩杆3d,其中一侧两个第二电动伸缩杆3d顶端之间设有第二补光灯3e,另一侧两个第二电动伸缩杆3d顶端之间设有第二监控摄像头3f,在第二补光灯3e和第二监控摄像头3f外均设有第二保护罩3j,每个所述第二保护罩3j 与第二电动伸缩杆3d之间均通过螺栓固定,每个第二电动伸缩杆3d与第二转盘3c之间固定连接,在第二机械臂3g的另一端设有用于夹住线缆的电控机械爪3h,在电控机械爪3h上设有用于给电控机械爪3h监控的观察定位摄像头3i,所述第二电机3b、第二电动伸缩杆3d、第二补光灯3e、第二监控摄像头3f、观察定位摄像头3i、电控机械爪3h以及用于控制第二机械臂3g 驱动的部件分别与单片机4f之间电连接。
44.实施例,请参照图1、6和7,两个所述监控照明设备5包括在履带车主体1顶端固定设置的第三电动伸缩杆5a,每个第三电动伸缩杆5a的顶端均设有电控调节座5b,在电控调节座5b的顶端设有通过螺栓固定且一面开口的第三保护罩5c,每个所述第三保护罩5c的内部设有设备壳体5d,在每个设备壳体5d位于第三保护罩5c开口的一侧中心处设有监控摄像头5f,在监控摄像头5f的四周设有led灯5e,其中单片机4f分别与第三电动伸缩杆5a、电控调节座5b、监控摄像头5f以及led灯5e电连接。
45.所述单片机4f与存储卡4g、gps定位仪4e以及无线收发天线4b电连接。
46.有操作原理:本实用新型在使用时,通过无线控制终端控制整个设备,通过设置挖斗,并在挖斗的一侧设置装土箱,可以将泥土的样本挖出放置在装土箱内,做到了在管道内作业时使用挖斗提取管道内的泥土样本进行检测,同时也可以排出管道内的淤泥,本实用新型通过设置机械爪,使得其不仅可以牵引电缆线,同时可以代替人工对管道内进行一些常规的作业,本实用新型车体内均采用防水设计,可以进行水下作业,同时配备温度传感器、水质检测器以及湿度传感器,对管道内进行温度、湿度以及对水质的检测,真正意义上做到了一车多用的功能。
47.该设履带巡检管道机器人的技术参数如下:
48.防水等级:ip68;材质:全不锈钢车架,坚固耐用;轮胎:全金属;尺寸:长27cm、宽30cm、高12cm,适用管径:280-2000mm;负载能力:5kg;产品重量:5kg;驱动方式:2前轮独立驱动,可360度行驶;移动速度:1m/s;停位精度:1cm;转弯半径:15cm;底盘高度:80mm;最大跨越高度:100mm;最大跨越幅度:150mm;最大爬坡:》35度;电源:大容量锂电池12s 10000mah;续航时间:约1.5h;电缆长度:1000米;
49.电机数:2个48v直流无刷电机;空载转速:8100rpm转每分钟;减速后速度:120rpm转每分钟;直径:30mm;电机长度:42mm;总共长度:85mm;出轴直径:6mm;出轴长度:35mm;输出功率:50w;扭矩:大扭矩15nm;空载电流:300ma;堵转电流:3000ma;减速箱型号:全金属紧密行星减速箱;减速比:64:1;编码器:光电式;输出路数:ab双路输出;每圈脉冲:12cpr脉冲每圈。
50.以上显示和描述了本实用新型的基本原理、主要特征和优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化
和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1