多级滑动伸缩臂的制作方法
1.本实用新型涉及伸缩臂技术领域,尤其涉及一种多级滑动伸缩臂。
背景技术:
2.目前,传统嵌套式伸缩臂结构多为二级,其基本臂与伸缩臂传动形式一般分为两种:油缸传动和链条传动。这种二级伸缩臂结构一般只用于较短伸缩距离使用的机械设备。
3.公告号为cn104989797a的中国实用新型专利提出一种三级伸缩臂,该伸缩臂通过链条连接,有效伸出距离较长,一二级伸缩臂可保持同步伸缩。但由于我国机械设备制造日趋于大型化,三级伸缩臂长度仍然不足,使得它在实际使用过程中难以满足实际要求。现有的臂与臂传动形式不能扩展为三级及以上,这主要是由于多级伸缩臂如果采用链条传动形式,现有的链接结构也无法驱动多级伸缩臂同步伸缩。
技术实现要素:
4.本实用新型的目的是提供一种多级滑动伸缩臂,该伸缩臂有效伸缩距离长,并且可以根据需要增加伸缩臂的级数量。
5.根据本实用新型的第一个方面,提供一种种多级滑动伸缩臂,其包括:
6.基本臂,n个伸缩臂;
7.所述n个伸缩臂包括:第一级伸缩臂、第二级伸缩臂
···
第n级伸缩臂;
8.所述第一级伸缩臂安装于基本臂上;
9.所述第二级伸缩臂嵌套滑动于第一级伸缩臂内;
10.所述第n级伸缩臂嵌套滑动于第n-1级伸缩臂内;
11.其中,n为正整数且大于等于2;
12.在所述基本臂与第一级伸缩臂之间、第一级伸缩臂与第二级伸缩臂之间、第n-1级伸缩臂与第n级伸缩臂之间设置有滑动组件;
13.在所述第一级伸缩臂与第二级伸缩臂之间、第n-1级伸缩臂与第n级伸缩臂之间设置有同步组件。
14.在一些具体的实施方式中,所述基本臂包括:
15.垂直滑鞍,其与机械设备的运动部件连接,并随运动部件上下移动而带动多级伸缩臂整体上下移动;
16.设置在所述垂直滑鞍上的伺服电机和减速机。
17.在一些具体的实施方式中,所述第一级伸缩臂包括:
18.一级滑动座;
19.齿条,其设置在所述一级滑动座上;
20.齿轮,其与所述齿条匹配连接,所述齿轮与减速机轴连接。
21.进一步地,在基本臂与第一级伸缩臂之间设置有一级滑动组件,所述一级滑动组件包括;
22.相互匹配的一级传动滑块和一级传动导轨;
23.所述一级传动滑块设置在垂直滑鞍或一级滑动座上;
24.所述一级传动导轨设置在一级滑动座或垂直滑鞍上。
25.进一步地,所述一级滑动座开设有一级滑槽,二级同步组件的同步带连接座穿设于其中。
26.在一些具体的实施方式中,所述第二级伸缩臂包括:
27.二级滑动座;
28.在第一级伸缩臂与第二级伸缩臂之间,设置有二级同步组件;
29.所述二级同步组件包括同步带轮、同步带、同步带固定夹、同步带连接座和同步带轮轴;
30.所述同步带连接座一端与同步带连接,另一端与垂直滑鞍连接固定;
31.所述同步带固定夹一端与同步带连接,另一端与二级滑动座连接固定。
32.进一步地,所述二级滑动座开设有二级滑槽,三级同步组件的同步带连接座穿设于其中。
33.在一些具体的实施方式中,所述第n级伸缩臂包括:
34.n级滑动座;
35.在第n-1级伸缩臂与第n级伸缩臂之间,设置有n级同步组件;
36.所述n级同步组件包括同步带轮、同步带、同步带固定夹、同步带连接座和同步带轮轴;
37.所述同步带连接座一端与同步带连接,另一端与n-2级滑动座连接固定;
38.所述同步带固定夹一端与同步带连接,另一端与n级滑动座连接固定;
39.其中,n为正整数且大于等于3。
40.进一步地,所述n级滑动座开设有n级滑槽,n+1级同步组件的同步带连接座穿设于其中。
41.在一些具体的实施方式中,在第n-1级伸缩臂与第n级伸缩臂之间设置有n级滑动组件,所述n级滑动组件包括:
42.相互匹配的n级传动滑块和n级传动导轨;
43.所述n级传动滑块设置在n级滑动座或n-1级滑动座上;
44.所述n级传动导轨设置在n-1级滑动座或n级滑动座上;
45.其中,n为正整数且大于等于2。
46.本实用新型与现有技术相比,其有益效果为:
47.1、本实用新型是一种通过齿轮齿条和同步带+同步带组件连接组成一个传动链系统,将不同的齿轮齿条和同步带+同步带组件置于基本臂或不同的伸缩臂上,实现一二三级伸缩臂同步伸缩,有效伸缩距离更长,并可以延伸更多级伸缩臂。
48.2、本实用新型只使用一套伺服电机+减速机组件驱动伸缩臂的伸缩,不仅解决了现有技术中每级伸缩臂均采用油缸或链轮驱动而自重较重和润滑的问题,而且有利于末端伸缩臂精确定位和防尘。
49.为了更好地理解和实施,下面结合附图详细说明本实用新型。
附图说明
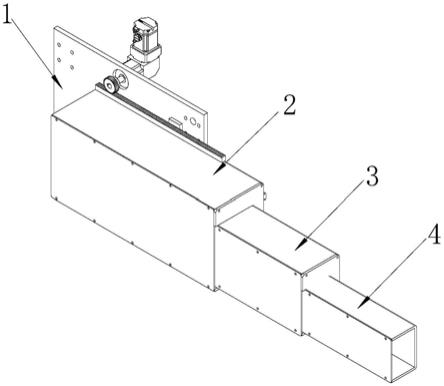
50.图1是本实用新型实施例的多级滑动伸缩臂的结构示意图;
51.图2是本实用新型实施例的基本臂的结构示意图;
52.图3是本实用新型实施例的多级滑动伸缩臂的结构示意图;
53.图4是本实用新型实施例的多级滑动伸缩臂的结构示意图;
54.图5是本实用新型实施例的多级滑动伸缩臂的结构示意图;
55.图6是本实用新型实施例的多级滑动伸缩臂的结构示意图;
56.图7是本实用新型实施例的多级滑动伸缩臂的结构示意图;
57.图8是本实用新型实施例的多级滑动伸缩臂的结构示意图;
58.图9是本实用新型实施例的第三级伸缩臂臂与打磨抛光轮连接示意图。
具体实施方式
59.为了更好地阐述本实用新型,下面参照附图1-9对本实用新型作进一步的详细描述。
60.本实用新型实施例提供了一种多级滑动伸缩臂,其包括:
61.基本臂,n个伸缩臂;
62.所述n个伸缩臂包括:第一级伸缩臂、第二级伸缩臂
···
第n级伸缩臂;
63.所述第一级伸缩臂安装于基本臂上;所述第二级伸缩臂嵌套滑动于第一级伸缩臂内;所述第n级伸缩臂嵌套滑动于第n-1级伸缩臂内;其中,n为正整数且大于等于2;
64.在所述基本臂与第一级伸缩臂之间、第一级伸缩臂与第二级伸缩臂之间、第n-1级伸缩臂与第n级伸缩臂之间设置有滑动组件;
65.在所述第一级伸缩臂与第二级伸缩臂之间、第n-1级伸缩臂与第n级伸缩臂之间设置有同步组件。
66.在所述第n级伸缩臂与打磨抛光轮连接。
67.具体地,当n等于2时,本技术实施例的多级滑动伸缩臂包括:基本臂、第一级伸缩臂、第二级伸缩臂;在所述第二级伸缩臂与打磨抛光轮连接。
68.所述第一级伸缩臂安装于基本臂上;所述第二级伸缩臂嵌套滑动于第一级伸缩臂内;
69.在所述基本臂与第一级伸缩臂之间、第一级伸缩臂与第二级伸缩臂之间设置有滑动组件;
70.在所述第一级伸缩臂与第二级伸缩臂之间设置有同步组件。
71.具体地,当n等于3时,本技术实施例的多级滑动伸缩臂包括:
72.基本臂、第一级伸缩臂、第二级伸缩臂、第三级伸缩臂;在所述第三级伸缩臂与打磨抛光轮连接。
73.所述第一级伸缩臂安装于基本臂上;所述第二级伸缩臂嵌套滑动于第一级伸缩臂内;所述第三级伸缩臂嵌套滑动于第二级伸缩臂内;
74.在所述基本臂与第一级伸缩臂之间、第一级伸缩臂与第二级伸缩臂之间、第二级伸缩臂与第三级伸缩臂之间设置有滑动组件;
75.在所述第一级伸缩臂与第二级伸缩臂之间、第二级伸缩臂与第三级伸缩臂之间设
置有同步组件。
76.具体地,当n等于4时,本技术实施例的多级滑动伸缩臂包括:
77.基本臂、第一级伸缩臂、第二级伸缩臂、第三级伸缩臂、第四级伸缩臂;在所述第四级伸缩臂与打磨抛光轮连接。
78.所述第一级伸缩臂安装于基本臂上;所述第二级伸缩臂嵌套滑动于第一级伸缩臂内;所述第三级伸缩臂嵌套滑动于第二级伸缩臂内;所述第四级伸缩臂嵌套滑动于第三级伸缩臂内。
79.在所述基本臂与第一级伸缩臂之间、第一级伸缩臂与第二级伸缩臂之间、第二级伸缩臂与第三级伸缩臂之间、第三级伸缩臂与第四级伸缩臂之间设置有滑动组件;
80.在所述第一级伸缩臂与第二级伸缩臂之间、第二级伸缩臂与第三级伸缩臂之间、第三级伸缩臂与第四级伸缩臂之间设置有同步组件。
81.其中,所述基本臂1包括:垂直滑鞍13,其与机械设备的运动部件连接,并随运动部件上下移动而带动多级伸缩臂整体上下移动;设置在所述垂直滑鞍上的伺服电机11和减速机12。
82.其中,所述第一级伸缩臂2包括:一级滑动座25;齿条22,其设置在所述一级滑动座25上;齿轮21,其与所述齿条22匹配连接,所述齿轮21与减速机12轴连接。
83.在基本臂与第一级伸缩臂之间设置有一级滑动组件,所述一级滑动组件包括:相互匹配的一级传动滑块23和一级传动导轨24;
84.所述一级传动滑块23设置在垂直滑鞍13或一级滑动座25上;所述一级传动导轨24设置在一级滑动座25或垂直滑鞍13上。
85.如图所示,所述一级传动滑块23设置在垂直滑鞍13上;所述一级传动导轨24设置在一级滑动座25上。
86.具体地,当伺服电机11正向、反向旋转时,经齿轮21、齿条22驱动,传动滑块23沿其传动导轨24方向伸出或缩回,第一级伸缩臂2也随之同步伸出或缩回。
87.所述一级滑动座25开设有一级滑槽26,二级同步组件的同步带连接座(34)穿设于其中。优选地,所述一级滑槽26呈长条状,且沿第一级伸缩臂的长度方向布置。
88.其中,所述第二级伸缩臂3包括:二级滑动座36;在第一级伸缩臂与第二级伸缩臂之间,设置有二级同步组件。
89.所述二级同步组件包括同步带轮31、同步带32、同步带固定夹33、同步带连接座34和同步带轮轴35;
90.所述同步带连接座34一端与同步带32连接,另一端与垂直滑鞍13连接固定;优选地,同步带连接座34穿设于一级滑动座25上的一级滑槽26。
91.所述同步带固定夹33一端与同步带32连接,另一端与二级滑动座36连接固定。
92.优选地,所述同步带轮轴35与一级滑动座25连接,以将同步带轮31固定在一级滑动座25内。
93.所述二级滑动座36开设有二级滑槽39,三级同步组件的同步带连接座44穿设于其中。优选地,所述二级滑槽39呈长条状,且沿第二级伸缩臂的长度方向布置。
94.具体地,当第一级伸缩臂伸出或缩回时,同步带连接座34带动同步带32转动,同步带32转动带动同步带固定夹33移动,同步带固定夹33与第二级伸缩臂的二级滑动座36连接
固定,进而第二级伸缩臂3随之同步伸出或缩回。
95.优选地,n为正整数且大于等于2时,在第n-1级伸缩臂与第n级伸缩臂之间设置有n级滑动组件,所述n级滑动组件包括:
96.相互匹配的n级传动滑块和n级传动导轨;
97.所述n级传动滑块设置在n级滑动座或n-1级滑动座上;所述n级传动导轨设置在n-1级滑动座或n级滑动座上;
98.具体地,当n等于2时,在第一级伸缩臂2与第二级伸缩臂3之间设置有二级滑动组件,所述二级滑动组件包括:
99.相互匹配的二级传动滑块37和二级传动导轨38;所述二级传动滑块37设置在二级滑动座36或一级滑动座25上;所述二级传动导轨38设置在一级滑动座25或二级滑动座36上。如图所示,所述所述二级传动滑块37设置在二级滑动座36上;所述二级传动导轨38设置在一级滑动座25上。
100.其中,所述第n级伸缩臂包括:n级滑动座;在第n-1级伸缩臂与第n级伸缩臂之间,设置有n级同步组件;
101.所述n级同步组件包括同步带轮、同步带、同步带固定夹、同步带连接座和同步带轮轴;
102.所述同步带连接座一端与同步带连接,另一端与n-2级滑动座连接固定;
103.所述同步带固定夹一端与同步带连接,另一端与n级滑动座连接固定;
104.其中,n为正整数且大于等于3。
105.优选地,所述n级滑动座开设有n级滑槽,n+1级同步组件的同步带连接座穿设于其中。
106.具体地,当n=3时,本技术实施例的多级滑动伸缩臂包括:基本臂1、第一级伸缩臂2、第二级伸缩臂3、第三级伸缩臂4。在所述第三级伸缩臂与打磨抛光轮5连接。
107.所述第一级伸缩臂2安装于基本臂1上;所述第二级伸缩臂3嵌套滑动于第一级伸缩臂2内;所述第三级伸缩臂4嵌套滑动于第二级伸缩臂3内;
108.其中,所述第三级伸缩臂4包括:
109.三级滑动座46;
110.在第二级伸缩臂3与第三级伸缩臂4之间,设置有三级同步组件;
111.所述三级同步组件包括同步带轮41、同步带42、同步带固定夹43、同步带连接座44和同步带轮轴45;
112.所述同步带连接座44一端与同步带42连接,另一端与一级滑动座25连接固定;优选地,同步带连接座44穿设于二级滑动座36上的二级滑槽39。
113.所述同步带固定夹43一端与同步带42连接,另一端与三级滑动座46连接固定。
114.优选地,所述同步带轮轴45与二级滑动座36连接,以将同步带轮41固定在二级滑动座36内。
115.优选地,所述三级滑动座开设有三级滑槽,当本技术实施例的多级滑动伸缩需要第四级伸缩臂时,供四级同步组件的同步带连接座穿设于其中。
116.具体地,当第一级伸缩臂伸出或缩回时,第二级伸缩臂3在同步带轮31和同步带32等组成的传动机构带动下,第二级伸缩臂3也随之同步伸出或缩回,第三级伸缩臂4在同步
带轮41和同步带42等组成的传动机构带动下,第三级伸缩臂4也随之同步伸出或缩回。
117.优选地,当n为正整数且大于等于2时,在第n-1级伸缩臂与第n级伸缩臂之间设置有n级滑动组件,所述n级滑动组件包括:
118.相互匹配的n级传动滑块和n级传动导轨;
119.所述n级传动滑块设置在n级滑动座或n-1级滑动座上;所述n级传动导轨设置在n-1级滑动座或n级滑动座上;
120.具体地,当n等于3时,在第二级伸缩臂3与第三级伸缩臂4之间设置有三级滑动组件,所述三级滑动组件包括:
121.相互匹配的三级传动滑块47和三级传动导轨48;
122.所述三级传动滑块47设置在三级滑动座46或二级滑动座36上;
123.所述三级传动导轨48设置在二级滑动座36或三级滑动座46上。
124.如图所示,所述三级传动滑块47设置在三级滑动座46上;所述三级传动导轨48设置在二级滑动座36上。
125.优选地,本实用新型实施例的第三级伸缩臂可以支撑新增一级臂及其负载质量,同样结构就可以再增加一级伸缩臂,从而构成四级伸缩臂,把有效伸缩距离延伸更长。
126.本实用新型是一种通过齿轮齿条和同步带+同步带组件连接组成一个传动链系统,将不同的齿轮齿条和同步带+同步带组件置于基本臂或不同的伸缩臂上,实现一二三级伸缩臂同步伸缩,有效伸缩距离更长,并可以延伸更多级伸缩臂。本实用新型的层层嵌套式多级滑动伸缩臂延伸了有效伸缩距离,能够适应各种规格风电叶片、大型船体和大型罐体等大型机械设备的表面打磨抛光等实际应用场合的要求。
127.另外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
128.在本实用新型的描述中,需要理解的是,术语“竖向”、“横向”、“前”、“后”、“左”、“右”、“垂直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为便于描述本实用新型和简化描述,而不是指示或暗指所指的装置或元件必须具有特定的方位、为特定的方位构造和操作,因而不能理解为对本实用新型保护内容的限制。
129.如果本文中使用了“第一”、“第二”等词语来限定零部件的话,本领域技术人员应该知晓:“第一”、“第二”的使用仅仅是为了便于描述本实用新型和简化描述,如没有另外声明,上述词语并没有特殊的含义。
130.本实用新型并不局限于上述实施方式,如果对本实用新型的各种改动或变形不脱离本实用新型的精神和范围,倘若这些改动和变形属于本实用新型的权利要求和等同技术范围之内,则本实用新型也意图包含这些改动和变形。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1