一种相对管道机器人倾斜安装的行走轮的制作方法
1.本实用新型涉及领域管道检测设备配件领域,尤其涉及一种相对管道机器人倾斜安装的行走轮。
背景技术:
2.随着城市的发展,地下管道网络越来越复杂,管理和维护的难度也越来越大。管道可能因路径、埋深不明而被外力破坏打穿,因此需要对管道进行测绘工作,此外,日常生活中经常发生管道漏水、管道淤积等情况,要解决这些问题,用管道机器人进行检测的方法也是最为高效的方式。管道机器人是一种可沿管道内部自动行走、携带一种或多种传感器及操作机械,在工作人员的遥控操作或计算机自动控制下,进行一系列管道作业的机、电、仪一体化系统。
3.中国专利cn212929184u一种用于管道检测机器人的防滑轮公开了一种防滑轮,包括圆形的轮盘、轮齿和连接杆,所述连接杆的一端固定在所述轮盘上,并且所述一端的端面中心与所述轮盘圆心相对,另一端用于固定在所述管道检测机器人的轮毂上,以使所述轮盘与所述管道检测机器人的轮毂同轴。如图1所示,当管道机器人500的轮毂510与防滑轮的轮盘190相对,轮盘190与管道检测机器人的轮毂510同轴时,轮盘200相对管道内壁的运行切面呈一定角度,如果轮盘上的轮齿具有一定宽度时,势必有一部分是无法与管道内壁完全接触的,即便是采用尖头轮齿,齿轮伸入管道内壁的方向也是一次深一侧浅,这样会减弱行进过程中的抓地力,不利于管道机器人行进的稳定性。
技术实现要素:
4.本实用新型的目的在于提供一种相对管道机器人倾斜安装的行走轮,行走轮与管道内壁呈垂直或近似垂直状态,使得管道机器人在运行时,行走轮与管道内壁完全接触,提升行走轮的抓地力,在遇到障碍物时,保证管道机器人运行的平稳性。
5.本实用新型提供了一种相对管道机器人倾斜安装的行走轮,所述行走轮相对管道机器人倾斜安装,行走轮的中轴线与管道机器人的中轴线具有一定的夹角,所述行走轮相对管道内壁的运行切面呈垂直或近似垂直状态。
6.进一步地,所述行走轮包括驱动电机和轮体,所述轮体的外侧面设有伞状轮架;所述驱动电机通过固定架与管道机器人安装座固定连接;所述驱动电机的输入端与管道机器人的控制器连接,所述驱动电机的输出轴通过联轴器与轮架的中心连接,所述驱动电机驱动轮架转动同时带动轮体转动。
7.进一步地,所述驱动电机相对管道机器人倾斜安装,倾斜的程度以使得轮体相对管道内壁的运行切面呈垂直或近似垂直状态为宜。
8.进一步地,所述轮体与轮架为一体式结构。
9.进一步地,所述轮体一圈安装有轮齿。
10.进一步地,所述轮齿与管道内壁接触的端部为尖头状。
11.进一步地,所述行走轮适用于非金属管道。
12.进一步地,所述轮齿与管道内壁接触的端部为平面状。
13.进一步地,所述行走轮适用于金属管道或非金属管道。
14.综上所述,本实用新型提供了一种相对管道机器人倾斜安装的行走轮,行走轮相对于管道机器人倾斜安装,使得行走轮相对管道内壁的运行切面呈垂直或近似垂直状态。当管道机器人在管道内行进时,行走轮上的轮齿与管道内壁充分接触,避免了遇到障碍物时由于接触不充分容易发生的倾倒现象,使得管道机器人的运行更加平稳。轮齿端部设计为尖头状,更加适用于非金属管道,使得管道机器人与管道内壁的接触面积更小,抓地力更强。
附图说明
15.图1为现有技术中管道机器人轮盘相对管道机器人的位置示意图;
16.图2为本技术行走轮相对管道机器人的位置示意图;
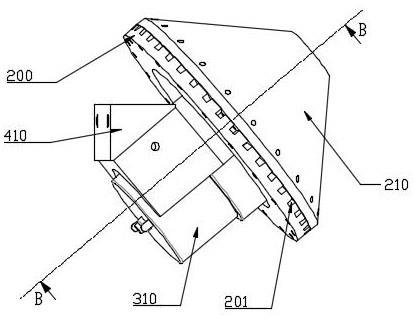
17.图3为本技术行走轮示意图;
18.图4为图3沿b-b方向的剖面图;
19.图5为安装有轮齿的轮体(1);
20.图6为安装有轮齿的轮体(2);
21.其中,附图标记说明如下:
22.500、管道机器人;510、轮毂;520、安装座;190、轮盘;100、管道;200、轮体;201、安装孔;202、轮齿;210、轮架;310、驱动电机;320、联轴器;410、固定架。
具体实施方式
23.下面将结合示意图对本实用新型的具体实施方式进行更详细的描述。根据下列描述,本实用新型的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本实用新型实施例的目的。
24.在本实用新型的描述中,需要理解的是,术语“中心”、“上”、“下”、“左”、“右”等指示的方位或者位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
25.一种相对管道机器人倾斜安装的行走轮,如图2所示,行走轮相对管道机器人500 倾斜安装,行走轮的中轴线与管道机器人的中轴线具有一定的夹角,处于非垂直状态,行走轮相对管道内壁的运行切面呈垂直或近似垂直状态。
26.管道机器人两侧左右对称地设有偶数个行走轮,例如四个。管道机器人上设有用于行走轮与管道机器人固定连接的安装座520,每个安装座520左右安装两个行走轮。
27.如图3-图4所示,行走轮包括驱动电机310、空心轮体200以及设置在轮体200外侧面的伞状轮架210。驱动电机310通过固定架410与管道机器人安装座520固定连接。具体地,驱动电机310相对管道机器人倾斜安装,驱动电机310的中轴线与管道机器人安装座 520的水平中心线呈一夹角,倾斜的程度以使得轮体200相对管道内壁的运行切面呈垂直或近似垂直状态为宜。具体倾斜角度的设置与所选用的驱动电机的轴向长度、轮体半径的大小、适
用的管道内径以及管道机器人的大小等相关。轮架210第一端(即开口端)与轮体200一圈固定连接,轮架210与轮体200也可以设为一体式结构。驱动电机310一部分伸入伞状轮架210内,轮架210位于驱动电机310中部外圈。驱动电机310的输入端与管道机器人的控制器连接,控制器为驱动电机310提供电源和运行信号,驱动电机310的输出轴通过联轴器 320与轮架210中心连接,驱动轮架210转动同时带动轮体200转动,继而带动管道机器人前进或后退。具体地,轮架210第二端内部设有一安装腔,用于与联轴器320的第一端固定连接,联轴器320的第二端与驱动电机310的输出端连接。更进一步地,可将驱动电机310 相对管道机器人安装座520设置为角度可调结构,用以适应不同内径的管道。
28.轮体200一圈设有多个用于安装轮齿202的安装孔201。轮齿202与管道内壁接触的端部可设置为平面状,如图5所示,这种行走轮既适用于金属管道也适用于非金属管道,管道机器人运行过程中,轮齿端部可与管道内壁充分接触,加大行进的摩擦力。此外,针对非金属管道,轮齿与管道内壁接触的端部可选择尖头状,如图6所示,这种行走轮在非金属管道行进时,轮齿与管道内壁垂直接触,抓地力更强,更不容易出现打滑或倾倒现象。
29.上述仅为本实用新型的优选实施例而已,并不对本实用新型起到任何限制作用。任何所属技术领域的技术人员,在不脱离本实用新型的技术方案的范围内,对本实用新型揭露的技术方案和技术内容做任何形式的等同替换或修改等变动,均属未脱离本实用新型的技术方案的内容,仍属于本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1