一种物联网平衡阀的执行机构及使用此执行机构的平衡阀的制作方法
1.本技术涉及阀门自动控制装置领域,尤其是涉及一种物联网平衡阀的执行机构及使用此执行机构的平衡阀。
背景技术:
2.目前,平衡阀用于平衡管道或者容器内部的压力差或者流量差,用于调节平衡阀阀板两侧压力的相对平衡。
3.相关技术中,平衡阀包括智能仪表、调节轮以及与调节轮连接的平衡阀阀门,用户通过观察智能仪表显示的数据,查看平衡阀阀体两侧的压力差,之后通过调节轮的转动对平衡阀阀门进行调节,平衡衡阀阀体两侧的压力。
4.针对上述中的相关技术,发明人认为对平衡阀阀体进行调节时,由于平衡阀阀体的密封性要求较高,手动调节时阻力较大,导致用户手动转动调节轮的效率较低。
技术实现要素:
5.为了便于用户控制平衡阀的开合,减轻用户的工作负担,本技术提供一种物联网平衡阀的执行机构。
6.本技术提供的一种物联网平衡阀的执行机构采用如下的技术方案:
7.一种物联网平衡阀的执行机构,包括机壳、位于机壳内部并连接于平衡阀阀板的阀门轴、位于机壳内部并套设阀门轴的转轴齿轮、转动连接于机壳内部用于带动转轴齿轮转动的驱动齿轮以及固定连接于机壳内部用于带动驱动齿轮转动的驱动组件,所述阀门轴连接于所述转轴齿轮中心位置。
8.通过采用上述技术方案,驱动机构带动驱动齿轮发生转动,驱动齿轮的转动带动转轴齿轮发生偏转,使得转轴齿轮带动阀门轴发生偏转,带动平衡阀阀板发生偏转,实现自动控制平衡阀开合的目的,便于用户控制平衡阀的开合,减轻了用户的劳动量。
9.可选的,所述机壳的内部还连接有用于传递所述驱动齿轮运动状态的传动齿轮组与用于带动所述转轴齿轮转动的增矩减速齿轮组,所述传动齿轮组与所述增矩减速齿轮组均由多个双层齿轮啮合组成,所述增矩减速齿轮组的双层齿轮的外齿直径大于所述传动齿轮组的双层齿轮的外齿直径。
10.通过采用上述技术方案,驱动电机带动驱动齿轮转动后,由驱动齿轮带动传动齿轮组内部的齿轮与增矩减速齿轮组内部的齿轮均发生转动,增矩减速齿轮组的双层齿轮的直径大于所述传动齿轮组的双层齿轮的直径,传动的同时起到了减速、增大扭矩的作用,且阀门轴将平衡阀阀板闭合后,降低平衡阀阀板因管道内部的介质冲击而开启的可能性。
11.可选的,所述传动齿轮组包括第一双层齿轮、第二双层齿轮以及第三双层齿轮,所述第一双层齿轮的外齿与所述驱动齿轮啮合,所述第一双层齿轮的内齿与所述第二双齿轮的外齿啮合,所述第二双层齿轮的内齿与所述第三双层齿轮的外齿啮合,所述增矩减速齿轮组包括第四双层齿轮与第五双层齿轮,所述第三双层齿轮的内齿与所述第四双层齿轮的
外齿啮合,所述第四双层齿轮的内齿与所述第五双层齿轮的外齿啮合,所述第五双层齿轮通过啮合带动所述转轴齿轮转动。
12.通过采用上述技术方案,实现了将驱动齿轮的运动状态传递到转轴齿轮处的目的,转轴齿轮带动阀门轴转动,实现了对平衡阀阀体开合的自动控制。
13.可选的,所述机壳的内部可拆卸安装有减速机组壳,所述驱动齿轮、所述转轴齿轮、所述传动齿轮组以及所述增矩减速齿轮组均安装于所述减速机组壳内。
14.通过采用上述技术方案,当驱动齿轮、转轴齿轮、传送齿轮组或者增矩减速齿轮组出现故障时,可将减速机组壳整体进行拆卸,便于用户更换安装。
15.可选的,所述减速机组壳包括顶壳、位于顶壳正下方的显位板、位于显位板正下方的底板以及固定连接于机壳底面的限位柱,所述限位柱自上而下依次穿过并固定连接于顶壳、显位板、底板,所述限位柱位于所述顶壳的边角位置,所述底板的上表面连接有用于使得所述第三双层齿轮与所述第四双层齿轮脱离啮合的分离调节组件。
16.通过采用上述技术方案,当驱动电机发生故障,无法通过驱动电机开合平衡阀阀板的时候,或者需要用户手动调节平衡阀阀板开合状态的时候,用户可将传动齿轮组与增矩减速齿轮组分离,此时用户直接旋转转轴齿轮可减少旋转时的阻力,可通过手动调节将平衡阀阀板打开或者关闭。
17.可选的,所述第三双层齿轮沿竖直方向滑动连接于其自身的转动轴,所述的分离调节组件包括固定连接于第三双层齿轮一侧的安装柱、沿竖直方向滑动连接于安装柱的滑动块、沿竖直方向滑动连接于第三双层齿轮转动轴顶部的连接板、套设于安装柱周向的指压弹簧以及套设于第三双层齿轮转动轴底部的脱离弹簧,所述连接板远离第三双层齿轮的一端固定连接于所述滑动块的周向外壁,所述连接板的底面固定连接于所述第三双层齿轮的内齿顶部。
18.通过采用上述技术方案,按压按钮之后,第三双层齿轮在滑动块与连接板的共同作用下沿竖直向下的方向滑动,第三双层齿轮与第四双层齿轮脱离啮合,当驱动电机发生故障,无法通过驱动电机开合平衡阀阀板的时候,或者需要用户手动调节平衡阀阀板开合状态的时候,用户可控制分离调节组件将传动齿轮组与增矩减速齿轮组分离,此时用户直接旋转转轴齿轮可减少旋转时的阻力,可通过手动调节将平衡阀阀板打开或者关闭。
19.可选的,所述转轴齿轮包括转动连接于减速机组壳内部的齿轮轴、固定连接于齿轮轴周向侧壁的传动齿轮以及固定连接于齿轮轴顶部的手转轮,所述第五双层齿轮的内齿与所述传动齿轮啮合;所述传动齿轮为扇形齿轮,所述手转轮位于所述显位板的上方。
20.通过采用上述技术方案,传动齿轮与第五双层齿轮啮合运动时,扇形齿轮的设置可使得转轴齿轮存在转动极限,当平衡阀阀体转至最大的角度时,可自动停止转动;用户将顶壳拆除、按压按钮之后,用户在旋转时增大了用户手与手转轮之间的摩擦力,便于用户紧握手转轮。
21.可选的,所述限位柱的数量至少为两个,所述限位柱位于所述传动齿轮的转动轨迹内部。
22.通过采用上述技术方案,当阀门轴带动平衡阀阀板开合到极限位置时,使得限位柱与传动齿轮的抵接,转轴齿轮无法继续转动。
23.可选的,所述转轴齿轮还包括固定连接于齿轮轴周向侧壁用于与外接齿轮结构啮
合以输出传动齿轮的转动角度信息的定位齿轮,所述定位齿轮位于所述顶壳与所述显位板之间。
24.通过采用上述技术方案,用户可在拆卸顶壳、按压按钮之后,即可握紧手转轮进行转动,无需将显位板拆除,用户可通过观察定位齿轮转动的位置,判断平衡阀阀板的开合状态,直至传动齿轮抵接于限位柱的表面。
25.可选的,一种平衡阀使用上述的一种物联网平衡阀的执行机构。
26.通过采用上述技术方案,能够实现自动控制平衡阀阀体自动开合的目的。
27.综上所述,本技术包括以下至少一种有益技术效果:
28.1.本技术通过设置转轴齿轮、驱动齿轮以及驱动组件,带动平衡阀阀板发生偏转,实现自动控制平衡阀开合的目的,便于用户控制平衡阀的开合,减轻了用户的劳动量;
29.2.本技术通过设置传动齿轮组与增矩减速齿轮组,使得传动齿轮组与增矩减速齿轮组传动的同时起到了减速、增大扭矩的作用,且阀门轴将平衡阀阀板闭合后,降低平衡阀阀板因管道内部的介质冲击而开启的可能性;
30.3.本技术通过设置分离调节组件,当驱动电机发生故障,无法通过驱动电机开合平衡阀阀板的时候,或者需要用户手动调节平衡阀阀板开合状态的时候,用户可控制分离调节组件将传动齿轮组与增矩减速齿轮组分离,此时用户直接旋转转轴齿轮可减少旋转时的阻力,可通过手动调节将平衡阀阀板打开或者关闭。
附图说明
31.图1是本技术实施例中一种物联网平衡阀的执行机构的结构示意图;
32.图2是本技术实施例中一种物联网平衡阀的执行机构去掉机壳顶部的结构示意图;
33.图3是本技术实施例中一种物联网平衡阀的执行机构去掉机壳顶部、驱动电机以及顶壳的结构示意图;
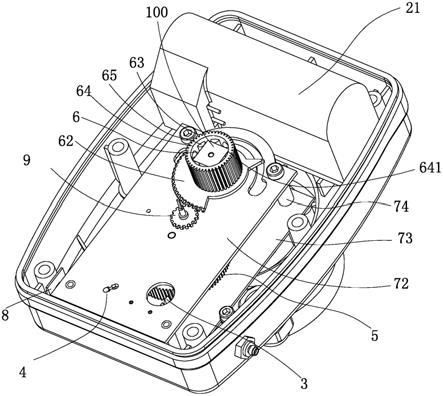
34.图4是本技术实施例中一种物联网平衡阀的执行机构去掉机壳顶部的结构示意图;
35.图5是旨在强调传动齿轮组与增距减速齿轮组连接关系的结构示意图;
36.图6是旨在强调分离调节组件连接位置的结构示意图。
37.附图标记说明:1、机壳;2、驱动组件;21、电池;22、驱动电机;3、驱动齿轮;4、传动齿轮组;41、第一双层齿轮;42、第二双层齿轮;43、第三双层齿轮;5、增矩减速齿轮组;51、第四双层齿轮;52、第五双层齿轮;6、转轴齿轮;61、传动齿轮;62、定位齿轮;63、手转轮;64、齿轮轴;641、轴心孔;65、弧形条;7、减速机组壳;71、顶壳;711、保护筒;72、显位板;73、底板;74、限位柱;8、分离调节组件;81、安装柱;82、滑动块;821、按钮;83、连接板;84、指压弹簧;85、脱离弹簧;9、感应齿轮;100、阀门轴。
具体实施方式
38.以下结合附图1-6对本技术作进一步详细说明。
39.本技术实施例公开一种物联网平衡阀的执行机构。参照图1,为一种物联网平衡阀的执行机构的外部特征,参照图2和图3,一种物联网平衡阀的执行机构,包括机壳1、位于机
壳1内部的驱动组件2、架设于机壳1内部的减速机组壳7、转动连接于减速机组壳7内部的驱动齿轮3、转动连接于减速机组壳7内部的转轴齿轮6、穿设于转轴齿轮6转动轴内部用于连接平衡阀阀板的阀门轴100以及转动连接于减速机组壳7内部的传动齿轮组4与增矩减速齿轮组5,驱动组件2带动驱动齿轮3发生转动,驱动齿轮3与传动齿轮组4内的一个齿轮啮合,传动齿轮组4内的一个齿轮与增矩减速齿轮组5内的一个齿轮啮合,传动齿轮组4将驱动齿轮3的转动传导至增矩减速齿轮组5,增矩减速齿轮组5带动转轴齿轮6转动,使得转轴齿轮6带动阀门轴100发生偏转,带动平衡阀阀板发生偏转,实现自动控制平衡阀开合的目的。当连接于减速机组壳7内部的零件出现故障时,可将减速机组壳7整体进行拆卸,便于用户更换安装。
40.参照图2和图3,驱动组件2与减速机组壳7均位于机壳1的内部,驱动组件2包括电池21与驱动电机22,电池21为驱动电机22供电,其中电池21位于机壳1的一端,减速机组壳7位于电池21朝向机壳1中心的一侧,减速机组壳7包括水平设置于机壳1内部的顶壳71、位于顶壳71正下方的显位板72、位于显位板72正下方的底板73以及沿竖直方向固定连接于机壳1底部的限位柱74,顶壳71、显位板72以及底板73沿水平方向的截面均为方形,底板73底面与机壳1的内底面之间存在空隙,限位柱74的数量至少为两个,本技术实施例中限位柱74的数量为四个,四个限位柱74分别位于显位板72的四个边角,限位柱74依次穿过顶壳71、显位板72以及底板73,限位柱74将顶壳71、显位板72以及底板73连接在一起,限位柱74的轴线方向中心螺纹连接有一个螺母,显位板72架设于限位柱74的顶部并通过螺母将显位板72夹紧在限位柱74的顶部,顶壳71固定连接于显位板72的上表面,驱动电机22固定连接于顶壳71的上表面背离电池21的一端。
41.参照图3和图4,驱动齿轮3位于驱动电机22的正下方,驱动电机22的输出轴与驱动齿轮3的顶部通过联轴器固定连接;传动齿轮组4位于底板73上表面背离电池21的一端,传动齿轮组4包括均转动连接于底板73上表面的第一双层齿轮41、第二双层齿轮42以及第三双层齿轮43,第一双层齿轮41、第二双层齿轮42以及第三双层齿轮43依次向远离驱动齿轮3的方向排列于底板73远离电池21的一端,第一双层齿轮41的外齿直径、第二双层齿轮42的外齿直径以及第三双层齿轮43的外齿直径依次增大,第一双层齿轮41的外齿与驱动齿轮3啮合,第一双层齿轮41的内齿与第二双层齿轮42的外齿啮合,第二双层齿轮42的内齿与第三双层齿轮43的外齿啮合。
42.参照图3和图4,增矩减速齿轮组5位于底板73上表面的中间位置,增矩减速齿轮组5包括第四双层齿轮51与第五双层齿轮52,第三双层齿轮43的外齿直径、第四双层齿轮51的外齿直径以及第五双层齿轮52的外齿直径依次增大,第三双层齿轮43的内齿与第四双层齿轮51的外齿啮合,第五双层齿轮52位于第四双层齿轮51背离第三双层齿轮43的一侧,第四双层齿轮51的内齿与第五双层齿轮52的外齿啮合。驱动电机22带动驱动齿轮3转动后,由驱动齿轮3带动传动齿轮组4内部的齿轮与增矩减速齿轮组5内部的齿轮均发生转动,第一双层齿轮41的直径、第二双层齿轮42的直径、第三双层齿轮43的直径、第四双层齿轮51的直径以及第五双层齿轮52的直径依次增大,起到了减速、增大扭矩的作用。
43.参照图4和图5,转轴齿轮6位于机壳1底部的中间位置,转轴齿轮6包括齿轮轴64、固定连接于齿轮轴64周向侧壁的传动齿轮61、固定连接于齿轮轴64周向侧壁的定位齿轮62、位于齿轮轴64顶部的手转轮63以及固定连接于齿轮轴64的弧形条65。其中齿轮轴64沿
竖直方向穿过并转动连接于减速机组壳7,传动齿轮61是圆心角为钝角的扇形齿轮,传动齿轮61与第五双层齿轮52的内齿啮合,传动齿轮61的边缘可抵接于靠近电池21的限位柱74表面,以限制传动齿轮21的转动角度。传动齿轮61与第五双层齿轮52啮合后,驱动齿轮3可以带动传动齿轮61一起转动,扇形齿轮的设置可使得转轴齿轮6存在转动极限,限位柱74与传动齿轮61的抵接,使得当阀门轴100带动平衡阀阀板开合到极限位置时,转轴齿轮6无法继续转动。通过传动齿轮组4与增矩减速齿轮组5的增大扭矩的作用,使得阀门轴100将平衡阀阀板闭合后,降低平衡阀阀板因管道内部的介质冲击而开启的可能性,同时实现了平衡阀的自动开合。
44.参照图5和图6,分离调节组件8位于底板73上表面,且分离调节组件8位于第二双层齿轮42远离第一双层齿轮41的一侧,分离调节组件8包括安装柱81、滑动块82、连接板83、指压弹簧84以及脱离弹簧85,其中安装柱81沿竖直方向固定连接于底座的上表面,安装柱81的顶部固定连接于显位板72的下表面,安装柱81位于第三双层齿轮43远离第二双层齿轮42的一侧,滑动块82套设于安装柱81的周向位置,且滑动块82沿竖直方向滑动连接于安装柱81,连接板83一端套设于第三双层齿轮43的转动轴顶部,且连接板83沿竖直方向滑动连接于第三双层齿轮43的转动轴,连接板83的另一端固定连接于滑动块82的周向位置,指压弹簧84套设于安装柱81的周向位置,且指压弹簧84的一端固定连接于滑动块82的底面,指压弹簧84的另一端固定连接于底板73的上表面;第三双层齿轮43沿竖直方向滑动连接于其自身的转动轴,脱离弹簧85套设于第三双层齿轮43的转动轴,脱离弹簧85的一端固定连接于第三双层齿轮43的底面,脱离弹簧85的另一端固定连接于底板73的上表面。滑动块82远离连接板83的一侧设置有按钮821,按钮821远离连接板83的一侧表面为粗糙平面,增大了按钮821与用户手之间的摩擦力,便于用户按压。
45.当驱动电机22出现故障,无法自动调节平衡阀阀体开合状态时,或者出现其他需要用户手动调节平衡阀阀体开合状态的情况时,按压按钮821,滑动块82向靠近底板73上表面的方向滑动,指压弹簧84与脱离弹簧85均被压缩,第三双层齿轮43在滑动块82与连接板83的共同作用下沿竖直向下的方向滑动,第三双层齿轮43与第四双层齿轮51脱离啮合,此时用户直接旋转转轴齿轮6可减少旋转时的阻力,当调节结束,松开按钮821,指压弹簧84与脱离弹簧85均复位,滑动块82与连接板83均复位,第三双层齿轮43与第四双层齿轮51重新啮合。
46.参照图2和图3,定位齿轮62的圆心角等于传动齿轮61的圆心角,定位齿轮62位于传动齿轮61的正上方,且定位齿轮62位于显位板72的上方,定位齿轮62的直径小于传动齿轮61的直径。手转轮63的外侧表面间隔设置有条形块,用户在旋转手转轮63时,增大了用户手与手转轮63之间的摩擦力,便于用户紧握手转轮63,手转轮63的直径小于定位齿轮62的直径,手转轮63位于显位板72的上方,顶壳71的上表面设置有保护筒711,手转轮63套设于保护筒711的内部,且手转轮63的顶部与保护筒711的上表面位于同一水平面。用户可在拆卸顶壳71、按压按钮821之后,即可握紧手转轮63进行转动,无需将显位板72拆除,用户可通过观察定位齿轮62转动的位置,判断平衡阀阀板的开合状态,直至传动齿轮61抵接于限位柱74的表面。
47.参照图2和图3,齿轮轴64的中间位置沿竖直方向开设有轴心孔641,连接于平衡阀阀板的阀门轴100穿设于轴心孔641的内部,阀门轴100的顶部为方形,阀门轴100的底部为
圆柱形,弧形条65沿竖直方向固定连接于轴心孔641内壁的顶部位置,弧形条65数量为多个,多个弧形条65沿轴线孔的内壁均匀分布,本技术实施例中弧形条65的数量为八个,相邻的弧形条65之间存在间隙,阀门轴100可在轴心孔641的内部沿竖直方向滑动,便于用户将阀门轴100与转轴齿轮6拆卸、安装,且阀门轴100的顶部四角卡接于多个弧形条65之间,使得转轴齿轮6转动时,阀门轴100可与转轴齿轮6同步运动,且弧形条65将阀门轴100卡接后,使得阀门轴100的转动更加稳定、平稳。
48.参照图2,显位板72的上表面中间位置转动连接有感应齿轮9,感应齿轮9与定位齿轮62齿轮啮合,感应齿轮9的顶部穿出顶壳71的上表面,感应齿轮9的顶部可与外部感应设施连接,外部感应设施将感应齿轮9的转动情况与转动位置进行结合分析,推导平衡阀阀体的开合状况,之后通过外显设备向用户反馈平衡阀阀体的开合状态,实现物联网控制的目的。
49.一种平衡阀使用本技术中一种物联网平衡阀的执行机构,实现自动控制平衡阀阀体自动开合的目的。
50.本技术实施例一种物联网平衡阀的执行机构的实施原理为:启动驱动电机22,驱动电机22带动驱动齿轮3转动,驱动齿轮3依次带动第一双层齿轮41、第二双层齿轮42、第三双层齿轮43、第四双层齿轮51以及第五双层齿轮52发生转动,第五双层齿轮52带动转轴齿轮6发生转动,转轴齿轮6带动阀门轴100转动,使得平衡阀阀板偏转;当驱动电机22出现故障或者需要用户手动调节平衡阀阀板时,拆掉顶壳71,按压按钮821,指压弹簧84与脱离弹簧85均被压缩,第三双层齿轮43在滑动块82与连接板83的共同作用下沿竖直向下的方向滑动,第三双层齿轮43与第四双层齿轮51脱离啮合,用户旋转转轴齿轮6将平衡阀阀板打开或者关闭,当调节结束,松开按钮821,指压弹簧84与脱离弹簧85均复位,滑动块82与连接板83均复位,第三双层齿轮43与第四双层齿轮51重新啮合,正常工作。
51.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1