多维自适应振动与噪声控制装置
1.本发明涉及的是一种减振降噪领域的技术,具体是一种多维度自适应振动与噪声控制装置。
背景技术:
2.噪声的本质是空气分子受结构表面振动的带动而形成的以结构为中心向外扩散的压力波,即受声点处声压的幅频特性与结构表面振动存在对应相关性,实际工况下表征噪声的标量声压信号是由声源处表征不同维度结构表面振动的矢量加速度信号(或速度、位移信号)共同影响,因此,唯有能够同时抑制多维度结构表面振动,才可从声源处抑制噪声的辐射。
3.现有的减振降噪技术主要包括通过电磁弹簧实现刚度主动调节和设置多层“质量-弹簧
‑ꢀ
阻尼”结构以便与目标主振方向的多阶弯曲模态相匹配,但前者技术受限于电磁线圈的线径以及匝数且只能实现对单一维度低频结构振动的抑制,而后者技术属于被动式减振降噪装置,无法根据不同的外部激励实现固有频率的大范围连续调节。
技术实现要素:
4.本发明针对现有技术存在的上述不足,提出一种多维自适应振动与噪声控制装置,将噪声与振动信号的频谱特性相关联,通过两个五自由度谐振子的组合实现多维振动与噪声的自适应控制,从源头抑制结构振动与噪声的传播,对于现有技术效果不佳的低频段以及实时变化的振动和噪声工况都有着较为理想的减振降噪效果。
5.本发明是通过以下技术方案实现的:
6.本发明涉及一种多维自适应振动与噪声控制装置,包括:两个相连的五自由度的谐振系统,每个谐振系统包括:谐振质量体、三维连续弹性梁结构、传感器和控制器,其中:三维连续弹性梁结构设置于谐振质量体和目标减振降噪结构之间,传感器设置于目标减振降噪结构上,控制器分别与三维连续弹性梁结构和传感器相连以实现反馈控制,三维连续弹性梁结构和谐振质量体实现本谐振系统的谐振方向和有效工作频带,两个谐振系统的谐振质量体具有同向平动自由度且与降噪对象的最大振幅方向相对应。
7.所述的两个谐振系统覆盖六自由度并通过设置于两者之间的弹性及阻尼元件实现能量传递,加快耗散速率;当降噪对象的振动与噪声频率发生变化时,弹性及阻尼元件以及谐振系统中的三维连续弹性梁结构根据传感器测得的信号变化,通过控制器输出控制指令实现自适应变刚度调节和/或变阻尼调节,实现频率跟踪。
8.所述的五自由度包括:两个相互垂直的平动自由度和三个转动自由度,其中:两个相互垂直的平动自由度方向分别对应谐振系统的一阶弯曲模态,三个转动自由度分别对应谐振系统的一阶扭转模态和二阶弯曲模态,两个谐振质量体的同向平动自由度以及三个转动自由度皆可为主谐振轴,其余的各个振动自由度方向为副谐振轴。
9.所述的谐振质量体包括:沿三个平动自由度方向的极惯性矩和沿三个转动自由度
方向的转动惯量分别保持一致空间几何体,该谐振质量体采用导电性能较好的金属以在变化磁场中产生更强的电涡流效应。
10.所述的三维连续弹性梁结构沿单个维度方向上的尺寸远大于其余两个维度方向,其优选采用导磁和导热较好的金属材料制成。
11.所述的谐振系统的谐振方向和有效工作频带由三维连续弹性梁结构的横截面形状,即两条垂直对称轴(两个平动自由度方向)的极惯性矩决定。
12.所述的变刚度调节采用以下任一方式实现:
13.①
通过在三维连续弹性梁结构上设置简支约束端,并通过改变该简支约束端在沿弹性梁结构长度方向上的相对位置实现,该简支约束端与三维连续弹性梁结构之间周向约束,通过简支约束端限制三维连续弹性梁结构沿两个垂直谐振方向的位移。
14.所述的周向约束,通过设置于简支约束端和三维连续弹性梁结构之间的单排滚珠实现。
15.②
通过在三维连续弹性梁结构外设置电磁线圈并施加带有直流偏置的交流电信号,实现三维连续弹性梁结构的轴向力的变化,根据焦耳效应使得三维连续梁沿长度方向受热膨胀而产生的热应力,轴向热应力的改变会使得谐振系统自身的固有频率随之改变。
16.③
当任一谐振质量体沿主谐振轴方向振动时,同时对两个谐振质量体的电磁线圈施加电流,线圈间的同向电磁吸力或反向电磁斥力使得两个谐振质量体沿主振方向的刚度发生变化,同时固有频率也发生小幅变化。
17.所述的变阻尼调节采用以下任一方式实现:
18.i)当任一谐振质量体沿副谐振轴方向振动时,对两个谐振质量体中的任一对应的电磁线圈施加电流,使得垂直于竖直磁场的平面中振动的谐振质量体受到涡流阻尼力的作用;
19.ii)当任一谐振质量体沿主谐振轴方向振动时,同时两个谐振质量体的电磁线圈施加电流,当两个谐振质量体沿主谐振方向的初始距离较小时,使得电磁吸力导致的谐振质量体间非弹性碰撞等效成阻尼元件以实现能量耗散。
20.本发明涉及一种基于上述装置的多维自适应振动与噪声控制方法,根据声压和振动传感器在受声点与振源结构表面测得的时域信号,建立噪声与振动谱谐振峰的频率,即近声场中受声体处的噪声敏感频率与声源处结构共振频率之间的对应关系,通过排除噪声频谱中其他峰值的干扰并确保该频率下的振幅最大方向与主谐振轴的方向一致;当外部激励发生变化时,控制器通过对前端声压与加速度传感器采集到的信号作时频分析,计算出此时弹性及阻尼元件所需的理论刚度,并通过控制信号驱动执行器实现连续变刚度调节;然后改变电磁线圈的输入电流大小调节两个谐振质量体的振动相位,减小装置自身不平衡力矩的产生,增加谐振质量体之间的相互阻尼力;最后,通过抑制振源结构的多维振动实现从声源处抑制噪声辐射的目的。技术效果
21.与现有技术相比,本发明对弹性及阻尼元件三维连续弹性梁结构的横截面形状进行针对性结构设计,使得谐振质量五自由度方向上的有效工作频带覆盖不同维度上的目标减振频带,来实现多维变频振动的同步抑制。
附图说明
22.图1为本发明的结构示意图;
23.图2为与谐振质量体五自由度相对应的谐振系统前五阶模态振型;
24.图3为本发明结构中弹性及阻尼元件(三维连续弹性梁结构)横截面积的可选形状;
25.图4为本发明结构中弹性及阻尼元件变刚度调节的可选方式;
26.图5为本发明结构中谐振质量体间弹性、阻尼元件的工作原理示意图;
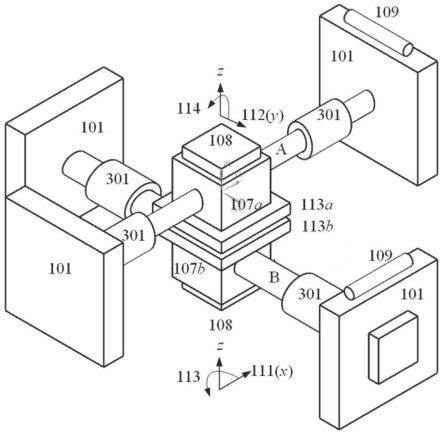
27.图6-图8为本发明实施例结构及工作原理示意图;
28.图9为实验模拟示意图;
29.图10为实施例计算结果示意图;
30.图中:101为目标减振降噪结构、a为沿不同方向的弹性及阻尼元件、105和106为两谐振质量体之间的弹性及阻尼元件、107为谐振质量体、108为设置于谐振质量体上的振动传感器、109为设置于目标对象上的噪声传感器、110为设置于目标对象上的振动传感器、111-112 为谐振质量体的平动自由度(副谐振轴)、113-114为谐振质量体的转动自由度、113为与谐振质量体相连的电磁线圈。
具体实施方式
31.如图6所示,本实施例涉及一种多维自适应振动与噪声控制装置,包括:两个相邻设置的谐振系统,其分别包括:谐振质量体107a/107b、分别与四个方向上的目标减振降噪结构101 相连的两对三维连续弹性梁结构a/b、分别设置于谐振质量体107a/107b和目标减振降噪结构 101上的振动传感器109和噪声传感器110以及分别与三维连续弹性梁结构和传感器相连的控制器(图中未示出),其中:一对三维连续弹性梁结构a分别设置于第一谐振质量体107a的两端并与两侧的目标减振降噪结构101相连,一对三维连续弹性梁结构b分别设置于第二谐振质量体107b的两端并与两侧的目标减振降噪结构101相连。
32.所述的两对三维连续弹性梁结构上分别滑动设有简支约束端300用于改变梁有效接入长度。
33.所述的第二谐振质量体107b的谐振系统实现沿z轴方向、y轴方向的两个平动自由度以及绕x轴、绕y轴以及绕z轴的转动自由度。
34.所述的第一谐振质量体107a的谐振系统实现沿z轴方向、垂直于三维连续弹性梁结构 a的轴向平面内且与z轴垂直的平动自由度以及绕x轴、绕y轴以及绕z轴的转动自由度。
35.所述的两个谐振质量体的谐振系统共同覆盖任意空间六自由度,其中五个自由度分别与谐振系统的前两阶弯曲模态以及一阶扭转模态相对应,其中:两个平动自由度方向为垂直于弹性梁的平面内的任意一组基向量,由于横截面为椭圆形,谐振子沿两个平动自由度方向的有效工作频带不一致,以满足双向目标减振频率不同的实际工况。
36.所述的谐振系统的有效工作频带由三维连续弹性梁结构b的长度、材料以及横截面半径确定,具体为:当横截面为圆形200时,两个平动自由度z轴和111方向的有效工作频带一致,频带宽度取决于两侧弹性梁的长度;当谐振质量体107两侧的弹性梁长度、材料均一致时,谐振系统二阶共振状态下,谐振子仅发生绕z轴和111方向的纯转动。
37.优选地,在所述的三维连续弹性梁结构a/b上分别活动设置简支约束端300,通过移动简支约束端300改变有效接入长度,即改变简支边界与谐振质量体107a/b的相对位置,以实现两个平动自由度z轴和111方向上固有频率的同步调节,其中:可调固有频率的最小分辨率取决于弹性梁的尺寸形状以及支点驱动机构的最小轴向位移。
38.本实施例结构适用于定频或变频旋转激励的减振降噪,其工作原理如下:当噪声传感器 109和振动传感器108检测到从目标对象101上向外传播的振动与噪声信号时,通过控制器进行时频分析得到与声功率谱上噪声峰值对应的振动频率、方向以及幅值,再经由控制器输出控制信号驱动简支约束端300进行变刚度调节,使得谐振系统的振型与此时目标对象表面的主结构振动反方向反向一致,由此实现基于噪声信号监测的多维自适应减振降噪。
39.如图7所示,通过调整三维连续弹性梁结构a/b的横截面形状以对应三向目标减振频率不同的实际工况,具体为:沿短轴方向振动时截面极惯性矩较小,刚度较低,因此固有频率较低:长轴情况相反。
40.优选地,在所述的调整三维连续弹性梁结构a/b上和/或至少一个谐振质量体上设置电磁线圈,并通过控制电磁线圈的输入电流调节弹性梁的轴向力实现变刚度,具体包括:
41.①
如图8所示,沿三维连续弹性梁结构a/b的轴向缠绕一定长度的电磁线圈301,通过控制电磁线圈301的输入电流调节弹性梁的轴向热应力,实现变刚度,该种方式适用于梁与目标对象表面材料均为非铁磁体的工况下。
42.②
在两个谐振质量体中的至少一个上设置电磁线圈113a/113b,对应两个谐振质量体均选择采用导电性较好的材料,当向电磁线圈113a/b施加高频交流电且当谐振质量体沿沿z 轴方向或沿111和112两个平动自由度方向振动时,由于电流趋肤效应产生的电涡流阻尼 105/106会加快振动能量耗散。
43.经过具体实际实验模拟,如图9所示,当装置被设置于梁的振动敏感位置处(梁跨中位置为其一阶和三阶振型的振幅最大点),谐振子质量分别为m1和m2,连接两个谐振子和梁的阻尼与刚度元件分别为k1、k3、c1、c3,两个谐振子之间的阻尼与刚度元件为k2、c2,梁的密度、横截面积、长度以及抗弯刚度分别为ρ、l、a、ei。分别对两个谐振子以及梁建立动力学方程:其中:δ为狄拉克函数,x0=0.5l,ω1和ω3分别为梁的一阶和三阶固有频率。
44.通过中心差分法求解上述动力学方程中两个谐振子以及梁的横向位移z
1 z
2 y,并比较引入弹簧和阻尼元件k2、c2前后梁的振幅,计算结果如图10所示,当其余参数保持不变的情况下,发现随着k2的增加,梁中点处的位移先减小后增加,相比于当刚度k2=0两谐振子相互独立的情况,两个谐振子之间阻尼与刚度元件的引入能够进一步增加能量耗散。与现有通过安装多个独立吸振器以对应结构各阶固有频率的减振方式相比,本装置不仅能够在不增加振子质量以及数量的前提下实现多自由度振动及噪声控制,而且还能够时间不同频带间的能量交互提升减振效果。
45.上述具体实施可由本领域技术人员在不背离本发明原理和宗旨的前提下以不同
的方式对其进行局部调整,本发明的保护范围以权利要求书为准且不由上述具体实施所限,在其范围内的各个实现方案均受本发明之约束。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1