一种自救援式管道检测机器人的制作方法
1.本发明涉及管道检测技术领域,具体为一种自救援式管道检测机器人。
背景技术:
2.管道建设期施工不规范,运行期管理不到位,容易造成管道产生缺陷,严重地会造成管道结构破坏或者功能损坏,导致输调水系统瘫痪,给工业生产和人民的日常生活带来极大不便,更严重的还存在安全问题,因此,定期对输水管道进行内窥探测,发现管道的缺陷并进行修复,对保障输水工程具有十分重要的意义,现有技术中,通过搭载先进的检测装置和开发智能算法高效、快捷地获取管道内部缺陷的信息,除了检测有无缺陷,还能检测管道几何量,借助于计算机视觉对管道缺陷进行定性和定量分析。
3.管道机器人巡检技术作为代替人工内窥的方式,探测结果更直观全面更准确,并且安全性高成本也低,但是输水管道内水流一般会携带泥沙或者砂砾石,在长期运行后会造成管道内砂砾石等障碍物的堆积,其次,或者因管道发生破损,造成管道内的淤堵。
4.目前,现有管道机器人越障能力差,遇到砂砾石或者淤堵障碍物时都很难通过,并且也容易陷入淤堵的泥沙中导致驱动轮打滑难以脱困,因此造成巡检机器人无法安全回收,并且也难以越过堆积的砂砾石继续前行进行巡检作业。
技术实现要素:
5.(一)解决的技术问题
6.针对现有技术的不足,本发明提供了一种自救援式管道检测机器人,在管道内具有自救援能力,有效的辅助巡检机器人在陷入淤堵障碍物时脱困,并且机器人的越障性能强,巡检时可以越过砂砾石等固体障碍物,解决了并且也容易陷入淤堵的泥沙中导致驱动轮打滑难以脱困,因此造成巡检机器人无法安全回收,并且也难以越过堆积的砂砾石继续前行进行巡检作业的问题。
7.(二)技术方案
8.为实现上述的目的,本发明提供如下技术方案:一种自救援式管道检测机器人,包括壳体、检测仪本体和两个履带驱动机构,所述壳体的上端设有开口,且开口处通过螺栓固定连接有盖板,所述盖板的上端与检测仪本体的下端固定连接,所述壳体内固定连接有两个隔板,两个所述隔板之间连接有调节机构,所述调节机构连接有两个支撑板,两个所述履带驱动机构分别安装在两个支撑板的侧壁,所述壳体的内侧固定连接有安装板,所述安装板的一侧连接有救援机构;
9.调节机构,用于改变两个支撑板之间的间距,实现调节两个履带驱动机构之间的距离,并且也同步调节两个支撑板之间的夹角使履带驱动机构可以倾斜贴合管道内壁;
10.救援机构,安装在壳体的前端,用于在机器人的履带驱动机构陷入泥沙中时顶起并推动机器人前行。
11.优选的,所述调节机构包括两个第一双向丝杆和第二双向丝杆,两个所述隔板的
侧壁均通过密封轴承与两个第一双向丝杆和第二双向丝杆的杆壁转动连接,所述壳体的左右两侧均通过方孔套接有两个矩形管,两个所述矩形管分别套接在两个第一双向丝杆的杆壁上,所述矩形管内固定连接有内螺纹块,且内螺纹块与第一双向丝杆的杆壁螺纹连接,所述壳体的左右两侧均设有支撑架,且支撑架的一侧分别与两个矩形管的一端固定连接,两个所述支撑架的下端均固定连接有两个铰接件,所述支撑架通过两个铰接件与支撑板铰接,所述壳体的下端左右两侧边角处均开设有两个缺口,两个所述缺口内均倾斜设置有拉杆,所述拉杆的一端通过转轴转动连接有内螺纹管,所述内螺纹管与第二双向丝杆的杆壁螺纹连接,所述拉杆的另一端穿过缺口并通过销钉与支撑板的一侧转动连接,两个所述隔板之间设有传动机构,所述传动机构与两个第一双向丝杆和两个第二双向丝杆连接。
12.优选的,所述传动机构包括传动带,所述传动带内绕接有两个第一带轮和两个第二带轮,且第一带轮的直径大于第二带轮的直径,两个所述第一带轮分别与两个第一双向丝杆同轴心固定连接,两个所述第二带轮分别与两个第二双向丝杆同轴心固定连接,所述隔板的一侧固定连接有第一电机,所述第一电机的输出端贯穿隔板的侧壁并固定连接有动力轮,且动力轮与传动带的侧壁相接触。
13.优选的,所述隔板的另一侧通过滚珠轴承转动连接有支撑轮,所述支撑轮与动力轮相配合分别位于传动带的内外两侧。
14.优选的,所述救援机构包括两个横轴,且横轴的两端均通过第二密封轴承与壳体的内侧转动连接,两个所述横轴的两端均穿过第二密封轴承并固定连接有摆臂,其中位于同一侧的两个所述摆臂通过销轴共同转动连接有顶杆,且顶杆的下端连接有棱锥块,所述安装板的一侧通过轴承座转动连接有一个传动轴,所述传动轴的两端均固定连接有蜗杆,两个所述蜗杆的杆壁上均啮合有蜗轮,所述蜗轮与横轴同轴心固定连接,所述传动轴的轴壁上固定连接有第一锥齿轮,所述第一锥齿轮的一侧啮合有第二锥齿轮,所述安装板的一侧固定连接有第二电机,所述第二电机的输出端贯穿安装板的侧壁并与第二锥齿轮的一侧固定连接。
15.优选的,所述壳体内固定连接有两个挡板,两个所述挡板相对的一侧分别与隔板的两端固定连接,所述隔板的一侧固定连接有两个密封板,两个所述密封板远离隔板的一端与壳体的内侧固定连接,所述密封板的下端壳体的下端内壁固定连接,所述密封板、隔板和挡板的上端均与壳体的上端开口边缘处平齐。
16.优选的,所述壳体的一侧固定连接有定位块,所述定位块远离壳体的一端与支撑板的一侧相接触。
17.(三)有益效果
18.与现有技术相比,本发明提供了一种自救援式管道检测机器人,具备以下有益效果:
19.1、本发明在使用的时候,保持机器人行走的同时开启调节机构,调节机构改变两个履带驱动机构之间的间距逐渐变大,以此改变履带驱动机构与管道内壁接触的位置,进而改变机器人机身在管道中的高度,以此提高其越障性能,使得机器人可以越过砂砾石等大块的障碍物,由于淤堵物的最深处为管道内的最低点处,因此,履带驱动机构之间的间距最大时,履带驱动机构与管道接触点处的淤堵物较浅,使得履带驱动机构可以与管道内壁保持足够的摩擦力,进而使其能够顺利驶过管道内的淤堵处,在管道内的淤堵较多时,机器
人的机身与淤堵物接触,且履带驱动机构极易陷入淤堵物内,此时可以启动救援机构工作辅助机器人实现自救援,从而能够使的机器人快速脱困,继续进行巡检任务,也使得机器人可以安全回收。
20.2、本发明设置有的调节机构,利用矩形管和拉杆配合使支撑架带动铰接件使两个支撑板相对的远离壳体,因此,实现调整两个履带驱动机构之间的间距,并且,由于第一双向丝杆的旋转速度小于第二双向丝杆的旋转速度,因此,内螺纹管的移动距离大于矩形管的移动距离,实现使得拉杆推动支撑板使两个履带驱动机构倾斜,既可以实现改变履带驱动机构之间的间距顶起机器人的机身提高其越障能力,还可以使履带驱动机构的履带保持与管道内壁的接触面积,避免打滑,提供足够的驱动力。
21.3、本发明设置有的救援机构,利用摆臂使顶杆做圆周运动,且运动时,由于两个摆臂同步运动,因此可以实现顶杆在做圆周运动时始终保持竖直状态,且在其运动过程中既可以拖动巡检机器人前行,在顶杆下端与管道内壁接触时还可以反向顶起巡检机器人,减少巡检机器人机身与淤堵物的接触面积,因此,配合履带驱动机构的驱动力,可以实现巡检机器人的蠕动前行,从而可以使得机器人具有较高的自救援能力,避免巡检机器人因遇到淤堵物无法前行进行巡检工作,同时也可以使得巡检机器人可以安全回收。
附图说明
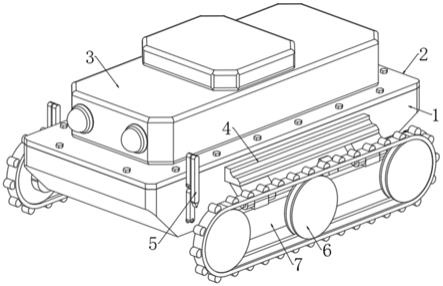
22.图1为本发明提出的一种自救援式管道检测机器人结构示意图;
23.图2为本发明提出的一种自救援式管道检测机器人中壳体的内部结构示意图;
24.图3为本发明提出的一种自救援式管道检测机器人中壳体的剖视图;
25.图4为本发明提出的一种自救援式管道检测机器人中调节机构的结构示意图;
26.图5为本发明提出的一种自救援式管道检测机器人中调节机构工作时的结构示意图;
27.图6为本发明提出的一种自救援式管道检测机器人中传动机构的结构示意图;
28.图7为本发明提出的一种自救援式管道检测机器人中救援机构的结构示意图;
29.图8为本发明提出的一种自救援式管道检测机器人中救援机构工作时的结构示意图;
30.图9为本发明提出的一种自救援式管道检测机器人中壳体、隔板、挡板和密封板的俯视图。
31.图中:1、壳体;2、盖板;3、检测仪本体;4、支撑架;5、顶杆;6、履带驱动机构;7、支撑板;8、铰接件;9、定位块;10、挡板;11、第一电机;12、隔板;13、密封板;14、横轴;15、第二电机;16、摆臂;17、拉杆;18、第二双向丝杆;19、内螺纹管;20、矩形管;21、内螺纹块;22、第一双向丝杆;23、传动带;24、动力轮;25、第一带轮;26、第二带轮;27、支撑轮;28、蜗杆;29、第一锥齿轮;30、第二锥齿轮;31、传动轴;32、安装板;33、棱锥块;34、缺口;35、蜗轮。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他
实施例,都属于本发明保护的范围。
33.实施例1:
34.参照附图1-9,一种自救援式管道检测机器人,包括壳体1、检测仪本体3和两个履带驱动机构6,壳体1的上端设有开口,且开口处通过螺栓固定连接有盖板2,盖板2的上端与检测仪本体3的下端固定连接,壳体1内固定连接有两个隔板12,两个隔板12之间连接有调节机构,调节机构连接有两个支撑板7,两个履带驱动机构6分别安装在两个支撑板7的侧壁,调节机构用于改变两个支撑板7之间的间距,实现调节两个履带驱动机构6之间的距离,并且也同步调节两个支撑板7之间的夹角使履带驱动机构6可以倾斜贴合管道内壁,壳体1的内侧固定连接有安装板32,安装板32的一侧连接有救援机构,救援机构安装在壳体1的前端,用于在机器人的履带驱动机构6陷入泥沙中时顶起并推动机器人前行,壳体1内固定连接有两个挡板10,两个挡板10相对的一侧分别与隔板12的两端固定连接,隔板12的一侧固定连接有两个密封板13,两个密封板13远离隔板12的一端与壳体1的内侧固定连接,密封板13的下端壳体1的下端内壁固定连接,密封板13、隔板12和挡板10的上端均与壳体1的上端开口边缘处平齐,壳体1的一侧固定连接有定位块9,定位块9远离壳体1的一端与支撑板7的一侧相接触。
35.本发明在使用的时候,从检修井处将巡检机器人放置在管道内,然后开启检测仪本体3,并利用履带驱动机构6驱动机器人行走,在遇到淤堵的障碍物时,保持机器人行走的同时开启调节机构,调节机构改变两个履带驱动机构6之间的间距逐渐变大,进而使的机器人在行走时,履带驱动机构6能够与不同高度位置的管道内壁接触,从而能够改变机器人机身在管道中的高度,以此提高其越障性能,使得机器人可以越过砂砾石等大块的障碍物,此外,在管道内的淤堵量较大时,操作调节机构使两个履带驱动机构6之间的间距最大化,由于淤堵物的最深处为管道内的最低点处,因此,履带驱动机构6之间的间距最大时,履带驱动机构6与管道接触点处的淤堵物较浅,使得履带驱动机构6可以与管道内壁保持足够的摩擦力,进而使其能够顺利驶过管道内的淤堵处,在管道内的淤堵较多时,机器人的机身与淤堵物接触,且履带驱动机构6极易陷入淤堵物,此时可以启动救援机构工作辅助机器人实现自救援,从而能够使的机器人快速脱困,继续进行巡检任务,也使得机器人可以安全回收。
36.实施例2:基于实施例1有所不同的是;
37.参照附图3-6,调节机构包括两个第一双向丝杆22和第二双向丝杆18,两个隔板12的侧壁均通过密封轴承与两个第一双向丝杆22和第二双向丝杆18的杆壁转动连接,壳体1的左右两侧均通过方孔套接有两个矩形管20,两个矩形管20分别套接在两个第一双向丝杆22的杆壁上,矩形管20内固定连接有内螺纹块21,且内螺纹块21与第一双向丝杆22的杆壁螺纹连接,壳体1的左右两侧均设有支撑架4,且支撑架4的一侧分别与两个矩形管20的一端固定连接,两个支撑架4的下端均固定连接有两个铰接件8,支撑架4通过两个铰接件8与支撑板7铰接,壳体1的下端左右两侧边角处均开设有两个缺口34,两个缺口34内均倾斜设置有拉杆17,拉杆17的一端通过转轴转动连接有内螺纹管19,内螺纹管19与第二双向丝杆18的杆壁螺纹连接,拉杆17的另一端穿过缺口34并通过销钉与支撑板7的一侧转动连接,两个隔板12之间设有传动机构,传动机构与两个第一双向丝杆22和两个第二双向丝杆18连接;
38.传动机构包括传动带23,传动带23内绕接有两个第一带轮25和两个第二带轮26,且第一带轮25的直径大于第二带轮26的直径,两个第一带轮25分别与两个第一双向丝杆22
同轴心固定连接,两个第二带轮26分别与两个第二双向丝杆18同轴心固定连接,隔板12的一侧固定连接有第一电机11,第一电机11的输出端贯穿隔板12的侧壁并固定连接有动力轮24,且动力轮24与传动带23的侧壁相接触,隔板12的另一侧通过滚珠轴承转动连接有支撑轮27,支撑轮27与动力轮24相配合分别位于传动带23的内外两侧。
39.本发明设置有的调节机构,在使用时,启动第一电机11带动动力轮24旋转,动力轮24旋转时与支撑轮27配合驱动传动带23旋转,传动带23旋转时带动第一带轮25和第二带轮26同时旋转,由于第一带轮25的直径大于第二带轮26的直径,且在传动带23的驱动速度一定时,第一带轮25的转速小于第二带轮26的转速,因此,第一带轮25带动第一双向丝杆22旋转的速度小于第二带轮26带动第二双向丝杆18的旋转速度,在第一双向丝杆22旋转带动内螺纹块21使矩形管20伸出壳体1外部时,第二双向丝杆18旋转带动内螺纹管19使拉杆17也伸出壳体1外部,从而使得矩形管20和拉杆17配合使支撑架4带动铰接件8使两个支撑板7相对的远离壳体1,因此,实现调整两个履带驱动机构6之间的间距,并且,由于第一双向丝杆22的旋转速度小于第二双向丝杆18的旋转速度,因此,在传动带23的驱动距离一定时,内螺纹管19的移动距离大于矩形管20的移动距离,因此,二者之间的距离差值使得拉杆17可以推动支撑板7倾斜,从而使两个履带驱动机构6随之倾斜,既可以实现改变履带驱动机构6之间的间距,使其可以相对顶起机器人的机身,还可以使履带驱动机构6的履带保持与管道内壁的接触面积,避免打滑,提供足够的驱动力。
40.实施例3:基于实施例1有所不同的是;
41.参照附图7-8,救援机构包括两个横轴14,且横轴14的两端均通过第二密封轴承与壳体1的内侧转动连接,两个横轴14的两端均穿过第二密封轴承并固定连接有摆臂16,其中位于同一侧的两个摆臂16通过销轴共同转动连接有顶杆5,且顶杆5的下端连接有棱锥块33,安装板32的一侧通过轴承座转动连接有一个传动轴31,传动轴31的两端均固定连接有蜗杆28,两个蜗杆28的杆壁上均啮合有蜗轮35,蜗轮35与横轴14同轴心固定连接,传动轴31的轴壁上固定连接有第一锥齿轮29,第一锥齿轮29的一侧啮合有第二锥齿轮30,安装板32的一侧固定连接有第二电机15,第二电机15的输出端贯穿安装板32的侧壁并与第二锥齿轮30的一侧固定连接。
42.本发明设置有的救援机构,在使用时,启动第二电机15带动第二锥齿轮30使第一锥齿轮29旋转,第一锥齿轮29旋转带动传动轴31旋转,传动轴31旋转带动蜗杆28使两个蜗轮35旋转,两个蜗轮35旋转带动两个横轴14同向同速旋转,因此,可以带动摆臂16做圆周运动,摆臂16做圆周运动时带动顶杆5也做圆周运动,并且通过销轴实现顶杆5与摆臂16之间的活动连接,因此,在顶杆5做圆周运动的时,其下端的棱锥块33插入淤堵物内,且受到淤堵物的阻力时,顶杆5将阻力反向作用在壳体1上,使壳体1前行,并且在顶杆5移动至下止点时,棱锥块33与管道内壁接触,此时,棱锥块33停止下移,并且可以反向顶起壳体1,减少壳体1与淤堵物的接触面积,因此,配合履带驱动机构6的驱动力,可以实现巡检机器人的蠕动前行,从而可以使得机器人具有较高的自救援能力,避免巡检机器人因遇到淤堵物无法前行进行巡检工作,同时也可以使得巡检机器人可以安全回收。
43.需要说明的是,术语“包括”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更
多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
44.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1