一种智能隧道施工安全监控系统的制作方法
1.本发明涉及施工安全技术领域,具体涉及一种智能隧道施工安全监控系统。
背景技术:
2.施工安全是各个行业工程建设中所遇到的安全问题。施工安全涵盖了在作业过程中所有的安全问题并且涉及管理、财务及后勤保障等相关内容。我国政府历来重视生产安全、人民生命和财产安全,并制定了相关的法律法规,对中华人民共和国领域内从事工程建设行业的人员及单位进行了明确的要求。
3.针对现有技术存在以下问题:
4.1、现有的施工安全监控系统一般不能进行便捷移动和固定的效果,其使用时需要消耗大量的时间和精力对其位置进行调节,不便于操作人员使用;
5.2、现有的施工安全监控系统通常采用一体式的设备,其占用体积较大,灵活性较低,不便于对其进行运输,增加了对其进行运输时的成本消耗。
技术实现要素:
6.本发明提供一种智能隧道施工安全监控系统,其中一种目的是为了具备能够便于对装置进行移动和固定的效果,解决现有的施工安全监控系统不便于进行移动和固定的问题;其中另一种目的是为了解决现有的施工安全监控系统采用一体式的设备,其占用体积较大,不便于对其进行拆卸运输的问题,以达到便于对设备进行拆卸运输的效果。
7.为解决上述技术问题,本发明所采用的技术方案是:
8.一种智能隧道施工安全监控系统,包括支撑机构,所述支撑机构包括有立柱,所述立柱的前端开设有滑槽,所述立柱的顶端设置有限位扣,所述立柱的底部设置有活动机构,所述立柱的外侧上方设置有升降机构,所述升降机构的右端设置有卡合机构,所述卡合机构的右端设置有监控机构,所述活动机构的下方左右两端设置有移动装置,所述活动机构的下方中部设置有固定装置,所述升降机构的内部左端穿设有定位装置,所述升降机构的内部前端穿设有驱动装置,所述卡合机构的上方设置有支顶装置,且位于支顶装置的下端设置有锁定装置。
9.本发明技术方案的进一步改进在于:所述移动装置包括有滚轮,所述滚轮的外侧设置有安装座,所述安装座的上方设置有转轴,所述转轴的上方设置有基座,所述基座的上方设置有螺纹头,所述螺纹头的外侧设置有螺帽。
10.采用上述技术方案,该方案中的滚轮、安装座、转轴、基座、螺纹头和螺帽共同配合,便于使装置通过滚轮进行移动。
11.本发明技术方案的进一步改进在于:所述固定装置包括有电动伸缩杆,所述电动伸缩杆的底部设置有撑脚。
12.采用上述技术方案,该方案中的电动伸缩杆和撑脚共同配合,便于对装置位置进行稳固固定。
13.本发明技术方案的进一步改进在于:所述定位装置包括有轮盘,所述轮盘的右侧表面焊接有螺纹杆。
14.采用上述技术方案,该方案中的轮盘和螺纹杆共同配合,对监控机构的高度进行固定。
15.本发明技术方案的进一步改进在于:所述驱动装置包括有电机,所述电机的旋转端活动连接有连接杆,所述连接杆的后端活动连接有齿轮。
16.采用上述技术方案,该方案中的电机、连接杆和齿轮共同配合,对监控机构的位置进行升降调节。
17.本发明技术方案的进一步改进在于:所述支顶装置包括有长杆,所述长杆的下端设置有限位环,所述限位环的上方设置有第一弹簧,所述限位环的下端设置有卡块,所述卡块的外侧设置有对接块。
18.采用上述技术方案,该方案中的长杆、限位环、第一弹簧、卡块和对接块共同配合,将升降机构与监控机构进行连接。
19.本发明技术方案的进一步改进在于:所述锁定装置包括有壳体,所述壳体的内侧设置有固定头,所述固定头的下方内侧设置有卡合板,所述卡合板的左侧表面开设有凹槽,所述凹槽的左端设置有第二弹簧,所述卡合板的内部下方通过设置有限位杆,所述限位杆的右端焊接有限位块。
20.采用上述技术方案,该方案中的壳体、固定头、卡合板、凹槽、第二弹簧、限位杆和限位块共同配合,对升降机构与监控机构连接部位进行紧固固定,避免使用过程中两者意外脱落。
21.本发明技术方案的进一步改进在于:所述监控机构包括有数据分析器,所述数据分析器的下端设置有外壳,所述外壳的内侧左端设置有驱动机,所述驱动机的旋转端活动连接有横杆,所述横杆的外侧设置有驱动轮,所述驱动轮的后端设置有齿条,所述齿条的下端设置有监控器,所述齿条的上方设置有限位板。
22.采用上述技术方案,该方案中的数据分析器、外壳、驱动机、横杆、驱动轮、齿条、监控器和限位板共同配合,通过驱动机能够对监控器的位置进行升降调节,然后通过监控器对隧道内情况进行观察,并且将其观测换面传输至数据分析器,通过数据分析器对其观测画面进行数据分析,从而提高工作人员的施工安全。
23.由于采用了上述技术方案,本发明相对现有技术来说,取得的技术进步是:
24.1、本发明提供一种智能隧道施工安全监控系统,通过滚轮、安装座、转轴、基座、螺纹头、螺帽、电动伸缩杆和撑脚的设置,通过螺纹头和螺帽将基座固定在活动机构上,由此能够通过滚轮对装置进行移动,并且通过安装座和转轴便于装置移动时进行方向调节,移动到合适位置后,再通过电动电动伸缩杆伸展使撑脚对装置进行支顶,由此对装置位置进行固定,从而便于使用者对装置的位置进行移动和固定。
25.2、本发明提供一种智能隧道施工安全监控系统,通过轮盘、螺纹杆、电机、连接杆和齿轮的设置,通过电机带动连接杆上的齿轮进行转动,再由齿轮和滑槽相互配合便于对其升降机构进行升降活动,并且,通过转动轮盘带动螺纹杆与立柱进行固定,从而将其高度固定紧固,由此便于对监控机构的高度进行调节。
26.3、本发明提供一种智能隧道施工安全监控系统,通过长杆、限位环、第一弹簧、卡
块、对接块、壳体、固定头、卡合板、凹槽、第二弹簧、限位杆和限位块的设置,通过第一弹簧对限位环进行支顶,继而卡块与对接块卡合,并且卡块穿过对接块进入壳体中,此处,通过第二弹簧对卡合板进行支顶,继而卡合板对卡块底端的固定头进行支顶,此处,通过限位杆对卡合板的活动方向进行限位,并且通过限位块对其活动范围进行限位,由此使升降机构与监控机构的连接处固定紧固,避免使用过程中两者意外脱落的情况,并且,通过向内侧挤压卡合板能够使固定头与卡合板分开,由此便于对装置进行拆卸,继而方便对装置进行运输,从而提高了装置使用的便捷性。
附图说明
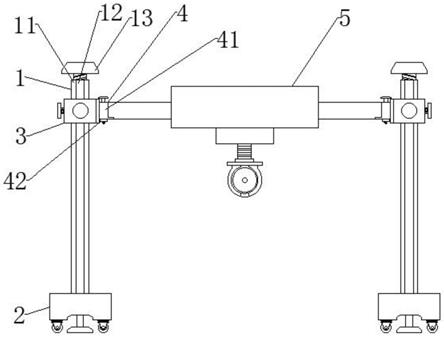
27.图1为本发明的正视结构示意图;
28.图2为本发明的活动机构剖视结构示意图;
29.图3为本发明的升降机构俯视结构示意图;
30.图4为本发明的支顶装置剖视结构示意图;
31.图5为本发明的锁定装置剖视结构示意图;
32.图6为本发明的监控机构剖视结构示意图。
33.图中:1、支撑机构;2、活动机构;3、升降机构;4、卡合机构;5、监控机构;11、立柱;12、滑槽;13、限位扣;21、移动装置;22、固定装置;31、定位装置;32、驱动装置;41、支顶装置;42、锁定装置;51、数据分析器;52、外壳;53、驱动机;54、横杆;55、驱动轮;56、齿条;57、监控器;58、限位板;211、滚轮;212、安装座;213、转轴;214、基座;215、螺纹头;216、螺帽;221、电动伸缩杆;222、撑脚;311、轮盘;312、螺纹杆;321、电机;322、连接杆;323、齿轮;411、长杆;412、限位环;413、第一弹簧;414、卡块;415、对接块;421、壳体;422、固定头;423、卡合板;424、凹槽;425、第二弹簧;426、限位杆;427、限位块。
具体实施方式
34.下面结合实施例对本发明做进一步详细说明:
35.如图1-6所示,包括支撑机构1,支撑机构1包括有立柱11,立柱11的前端开设有滑槽12,立柱11的顶端设置有限位扣13,立柱11的底部设置有活动机构2,立柱11的外侧上方设置有升降机构3,升降机构3的右端设置有卡合机构4,卡合机构4的右端设置有监控机构5,活动机构2的下方左右两端设置有移动装置21,活动机构2的下方中部设置有固定装置22,升降机构3的内部左端穿设有定位装置31,升降机构3的内部前端穿设有驱动装置32,卡合机构4的上方设置有支顶装置41,且位于支顶装置41的下端设置有锁定装置42。
36.优选的,移动装置21包括有滚轮211,滚轮211的外侧设置有安装座212,安装座212的上方设置有转轴213,转轴213的上方设置有基座214,基座214的上方设置有螺纹头215,螺纹头215的外侧设置有螺帽216,固定装置22包括有电动伸缩杆221,电动伸缩杆221的底部设置有撑脚222。
37.进一步的,通过螺纹头215和螺帽216将基座214固定在活动机构2上,由此能够通过滚轮211对装置进行移动,并且通过安装座212和转轴213便于装置移动时进行方向调节,移动到合适位置后,再通过电动电动伸缩杆221伸展使撑脚222对装置进行支顶,由此对装置位置进行固定,从而便于使用者对装置的位置进行移动和固定。
38.如图1-6所示,定位装置31包括有轮盘311,轮盘311的右侧表面焊接有螺纹杆312,驱动装置32包括有电机321,电机321的旋转端活动连接有连接杆322,连接杆322的后端活动连接有齿轮323。
39.更进一步的,通过电机321带动连接杆322上的齿轮323进行转动,再由齿轮323和滑槽12相互配合便于对其升降机构3进行升降活动,并且,通过转动轮盘311带动螺纹杆312与立柱11进行固定,从而将其高度固定紧固,由此便于对监控机构5的高度进行调节。
40.如图1-6所示,支顶装置41包括有长杆411,长杆411的下端设置有限位环412,限位环412的上方设置有第一弹簧413,限位环412的下端设置有卡块414,卡块414的外侧设置有对接块415,锁定装置42包括有壳体421,壳体421的内侧设置有固定头422,固定头422的下方内侧设置有卡合板423,卡合板423的左侧表面开设有凹槽424,凹槽424的左端设置有第二弹簧425,卡合板423的内部下方通过设置有限位杆426,限位杆426的右端焊接有限位块427。
41.优选的,监控机构5包括有数据分析器51,数据分析器51的下端设置有外壳52,外壳52的内侧左端设置有驱动机53,驱动机53的旋转端活动连接有横杆54,横杆54的外侧设置有驱动轮55,驱动轮55的后端设置有齿条56,齿条56的下端设置有监控器57,齿条56的上方设置有限位板58。
42.更进一步的,通过第一弹簧413对限位环412进行支顶,继而卡块414与对接块415卡合,并且卡块414穿过对接块415进入壳体421中,此处,通过第二弹簧425对卡合板423进行支顶,继而卡合板423对卡块414底端的固定头422进行支顶,此处,通过限位杆426对卡合板423的活动方向进行限位,并且通过限位块427对其活动范围进行限位,由此使升降机构3与监控机构5的连接处固定紧固,避免使用过程中两者意外脱落的情况,并且,通过向内侧挤压卡合板423能够使固定头422与卡合板423分开,由此便于对装置进行拆卸,继而方便对装置进行运输,从而提高了装置使用的便捷性。
43.下面具体说一下该智能隧道施工安全监控系统的工作原理。
44.如图1-6所示,该智能隧道施工安全监控系统,使用时,首先,通过螺纹头215和螺帽216将基座214固定在活动机构2上,由此能够通过滚轮211对装置进行移动,并且通过电动电动伸缩杆221伸展使撑脚222对装置进行支顶,由此对装置位置进行固定,接着通过第一弹簧413对限位环412进行支顶,继而卡块414与对接块415卡合,并且卡块414穿过对接块415进入壳体421中,由此使升降机构3与监控机构5的连接处固定紧固,紧接着,通过电机321带动连接杆322上的齿轮323进行转动,再由齿轮323和滑槽12相互配合便于对其升降机构3进行升降活动,并且,通过转动轮盘311带动螺纹杆312与立柱11进行固定,从而将其高度固定紧固。
45.最后,通过驱动机53对监控器57的位置进行升降调节,然后通过监控器57对隧道内情况进行观察,并且将其观测换面传输至数据分析器51,通过数据分析器51对其观测画面进行数据分析,从而提高工作人员的施工安全。
46.上文一般性的对本发明做了详尽的描述,但在本发明基础上,可以对之做一些修改或改进,这对于技术领域的一般技术人员是显而易见的。因此,在不脱离本发明思想精神的修改或改进,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1