一种电动阀/门的控制方法和装置与流程
本发明涉及阀门驱动技术,特别是一种通过矢量变频技术控制交流异步电动机驱动电动阀/门的控制方法和装置。
背景技术:
1、目前大量阀/门电动装置采用交流电源直接启动交流异步电动机,通过交流异步电动机带动机械传动机构驱动阀/门运行,实现开阀/关阀。交流异步电动机因结构简单、运行可靠、重量轻、价格便宜且启动扭矩较大等优点,在电动装置中应用比较广泛,但在使用过程中存在如下“打不开”、“关不严”、“停不准”等问题:
2、1)交流异步电动机的扭矩控制精度低,扭矩和转速动态范围小(峰值扭矩和速度受限),加上介质温度、异物、锈蚀等因素影响,交流异步电动机的驱动扭矩无法克服阻力矩,导致开阀时阀/门打不开;阀/门在运行过程中交流异步电动机的转速固定,开阀/关阀速度不变,关阀到达止点时造成阀座的动载荷过载,导致阀/门关严后打不开;
3、2)开阀/关阀的停止方式采用点位式触发停止,即在阀体的开阀/关阀停止点分别设置一个行程开关(或干簧管),依据行程开关(或干簧管)到位信号停止阀/门;由于行程开关(或干簧管)固有的触点机械间隙和重复控制精度误差较大,造成阀/门未关严停止或阀/门关严后无法停止,导致阀/门内漏或交流异步电动机无法停止而烧毁;且采用点位式触发停止方式无法实现全行程高精度位置控制,同时操作者无法获得阀/门的实时位置信息;
4、3)无法控制关阀到位时的阀座的受力大小,易造成阀/门关不严,导致阀/门内漏;阀/门长期使用中磨损、老化、电参数漂移等导致的特性变化,导致理论输出值和实际输出值误差大,关阀到位时的阀座的受力大小不稳定;
5、4)未考虑交流异步电动机物理特性差异,导致控制精度差,扭矩和转速动态范围小,批量产品性能不一致。
技术实现思路
1、本发明所要解决的技术问题是针对现有技术的上述缺陷,提供一种电动阀/门的控制方法和装置。
2、为了实现上述目的,本发明提供了一种电动阀/门的控制方法,其中,包括如下步骤:
3、s100、根据阀/门执行开启和关闭过程各阶段的需求设定相应的设定扭矩;
4、s200、以所述设定扭矩为输出扭矩或输出扭矩限值驱动交流异步电动机执行相应的阀/门开启或关闭动作;
5、s300、测量所述交流异步电动机或阀/门运行的实时扭矩;
6、s400、根据所述实时扭矩和设定扭矩,以所述设定扭矩为输入,以所述实时扭矩为反馈,采用pid控制算法对所述输出扭矩进行修正,以根据所述实时扭矩调节所述输出扭矩的响应速度和控制精度;以及
7、s500、在所述阀/门执行开启和关闭过程中重复步骤s300-s400直至完成所述阀/门开启或关闭,以实现所述阀/门开启或关闭运行的扭矩闭环控制。
8、上述的电动阀/门的控制方法,其中,步骤s300中,所述交流异步电动机或阀/门运行的实时扭矩采用电流检测结合矢量变换方法获得,或采用扭矩传感器直接自所述交流异步电动机的输出轴、阀/门减速传动箱的输出轴或阀/门驱动装置获得。
9、上述的电动阀/门的控制方法,其中,所述电流检测结合矢量变换方法包括,采用阀/门驱动器中的输出电流检测电路检测所述交流异步电动机的物理参数并计算获得所述实时转矩,所述物理参数包括定子电阻、转子电阻、定转子互感、定转子漏感和空载电流。
10、上述的电动阀/门的控制方法,其中,将所述交流异步电动机的三相交流信号,经过坐标变换转换为定子电流的转矩分量ist和定子电流的励磁分量ism,并根据磁场定向不同分别采用转子磁场定向矢量控制、直接转矩控制、转差频率矢量控制、定子磁场定向矢量控制或气隙磁场定向矢量控制计算获得所述实时扭矩;
11、其中,所述转子磁场定向矢量控制,根据转子全磁链矢量方向进行所述磁场定向,并采用如下公式获得所述实时扭矩tei:
12、
13、其中,np为所述交流异步电动机的电机极对数,lmd为所述交流异步电动机的定转子同轴时一相绕组的等效互感,lrd为所述交流异步电动机的转子一相绕组的等效自感,ist为所述交流异步电动机的定子电流的转矩分量,ψr为所述交流异步电动机的转子磁链;
14、所述直接转矩控制采用如下公式获得所述实时扭矩tei:
15、
16、其中,np为所述交流异步电动机的电机极对数,lm为定转子互感,ls为定子一相绕组的自感,lr为转子一相绕组的自感,ψs为定子磁链,ψr为转子磁链,θsr为转矩角,是矢量ψs和ψr之间的夹角;
17、所述转差频率矢量控制,根据转差频率矢量进行所述磁场定向,并采用如下公式获得所述实时扭矩tei:
18、
19、其中,np为所述交流异步电动机的电机极对数,tr为转子电磁时间常数,lrd为所述交流异步电动机的转子一相绕组的等效自感,ψr为所述交流异步电动机的转子磁链,ωs1为转差角频率;
20、所述定子磁场定向矢量控制,根据定子磁链矢量方向进行所述磁场定向,并采用如下公式获得所述实时扭矩tei:
21、tei=npψsist;
22、其中,np为所述交流异步电动机的电机极对数,ψs为所述交流异步电动机的定子磁链,ist为定子电流的转矩分量;
23、所述气隙磁场定向矢量控制,根据扭矩气隙磁链矢量方向进行所述磁场定向,并采用如下公式获得所述实时扭矩tei:
24、tei=npψmist;
25、其中,np为所述交流异步电动机的电机极对数,ψm为气隙磁链,ist为定子电流的转矩分量。
26、上述的电动阀/门的控制方法,其中,所述交流异步电动机的堵转扭矩误差控制在±10%额定扭矩的范围内,以稳定有效地控制所述阀/门关闭的密封比压。
27、上述的电动阀/门的控制方法,其中,还包括:
28、采用电流检测结合矢量变换方法或位置传感器的反馈信号获取阀门当前速度,根据设定速度和当前速度的偏差,通过pid控制算法对所述交流异步电动机的输出速度进行修正,并进一步叠加修正所述输出扭矩,以满足所述阀/门开启或关闭各阶段的速度要求。
29、上述的电动阀/门的控制方法,其中,还包括:
30、根据所述位置传感器的反馈信号判断是否到达所述阀/门开启或关闭过程各阶段的位置节点,并根据判断结果进一步调整所述输出扭矩,以满足所述阀/门开启或关闭各阶段的控制策略和位置精度的要求。
31、上述的电动阀/门的控制方法,其中,所述位置传感器为全行程传感器和/或点位式传感器,以实现全行程高精度位置控制和/或准确的节点位置控制。
32、上述的电动阀/门的控制方法,其中,还包括对所述交流异步电动机进行扭矩标定,进一步包括:
33、阀门驱动器逐点改变所述交流异步电动机的设定扭矩并驱动所述交流异步电动机加载;
34、采用扭矩标定装置检测所述交流异步电动机对应检测点的所述设定扭矩的输出扭矩,或采集阀门驱动器对应检测点的所述设定扭矩的内部扭矩反馈值;以及
35、生成各所述检测点的设定扭矩与相应的输出扭矩或内部扭矩反馈值的对应关系图表,用于修正所述交流异步电动机的输出扭矩。
36、为了更好地实现上述目的,本发明还提供了一种电动阀/门的控制装置,其中,采用上述的电动阀/门的控制方法,通过实时调整驱动交流异步电动机的输出扭矩,满足所述电动阀/门执行开启和关闭过程各阶段的响应速度和控制精度要求。
37、本发明的技术效果在于:
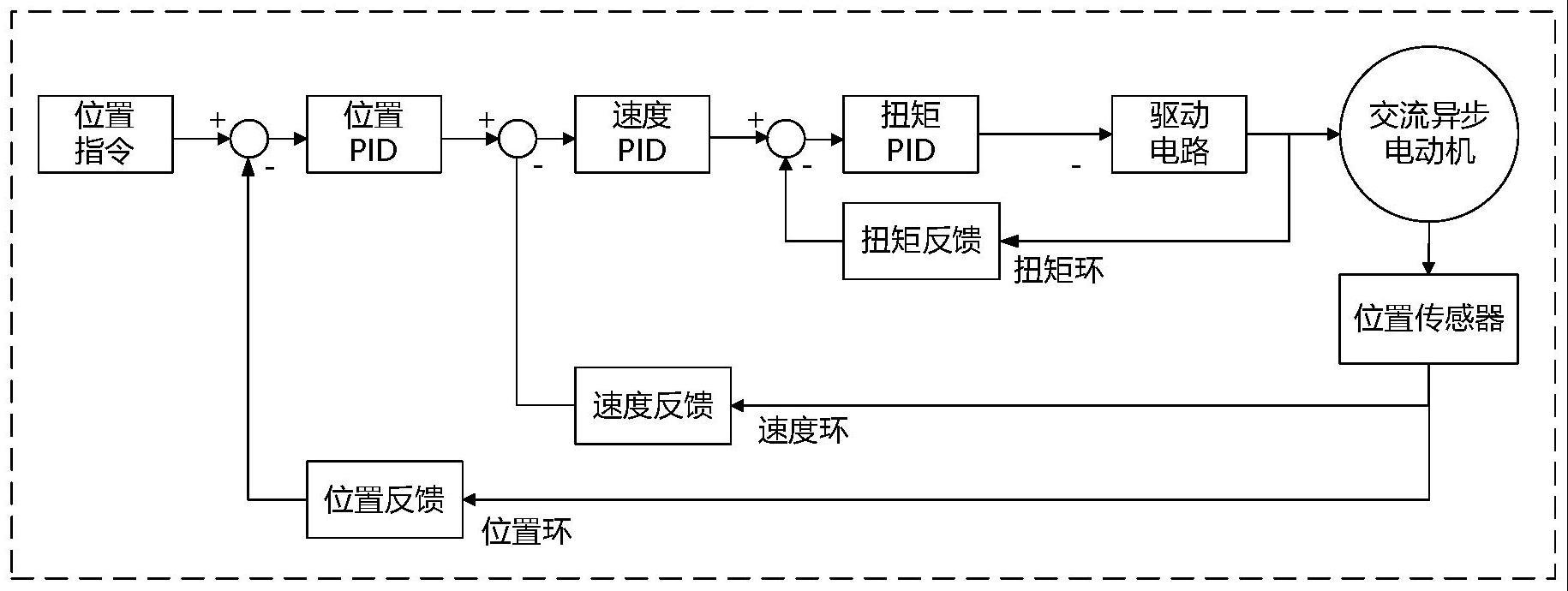
38、本发明以设定扭矩为输入,以检测的交流异步电动机或阀/门运行的实时扭矩为反馈,采用pid控制算法对驱动过程中的实际输出扭矩进行修正,根据实时扭矩即时调节输出扭矩,实现了电动阀/门开启和关闭的扭矩闭环控制,有效提高了响应速度和控制精度,使电动阀/门“打得开”、“关得严”、“停得准”;另外,本发明还可采用多重pid嵌套的方式由内而外分别建立扭矩环(也可为电流环)、速度环和位置环控制,并根据阀/门执行过程不同阶段的需求选择闭环层级或嵌套深度,从而确保了阀/门执行过程的迅速、精确、有效。
39、以下结合附图和具体实施例对本发明进行详细描述,但不作为对本发明的限定。
- 还没有人留言评论。精彩留言会获得点赞!