一种支撑力可调的无机房减震装置的制作方法
1.本发明属于电梯技术领域,涉及一种支撑力可调的无机房减震装置。
背景技术:
2.随着经济的不断快速发展,人民生活水平的不断提高,人们对于电梯产品的舒适度和安全性要求也是越来越高。对于无机房电梯而言,其振动源主要有曳引机、钢丝绳、导向轮以及导靴。
3.而其中,给无机房主机的固定增加减震垫,是降低共振,提高乘梯舒适度最直接的方法,也是广大电梯生产厂商普遍都在应用的技术。目前在无机房电梯的主机减震技术中,应用最为广泛的不外乎两种:一种是在主机固定底座的4个角上布置4个减震橡胶;另一种就是在主机本身的固定平台与系统承重平台之间均匀布置一整块或者多块减震橡胶;无论是哪一种,由于主机的固定平台与系统承重平台之间减震作用都是弹性元件,而主机固定平台作用在承重平台上的载荷并不均匀,就会导致曳引轮侧的载荷远远大于非曳引轮侧,而现有技术中,减震橡胶的弹性元件其材质硬度并无差异,且往往都是均匀布置,这就会造成在曳引轮侧的橡胶会发生较大的形变,而非曳引轮侧则几乎没有形变量,二者的形变差最终会导致主机的倾覆,所以往往需要额外布置一组防倾覆的机构来配套使用。而额外布置的防倾覆机构,虽然对于主机的倾覆有一定抑制作用,但也是治标不治本,当其失效时,主机仍然会发生倾覆的风险,且额外增加的机构会大大增加生产制造成本以及使安装复杂化。
4.此外,在现有主机固定平台和系统承重平台之间增加减震单元的技术中,主机固定平台和系统承重平台之间的固定往往采用螺栓刚性连接。该连接方式一方面会作为一个传递主机震动的介质,将部分主机传递给固定平台的震动再通过螺栓传递给承重平台,从而再由承重平台传递给整个电梯系统,降低乘梯舒适性;而另一方面,当主机固定平台与承重平台之间的减震单元发生压缩时,该螺栓组件的固定则将发生松动,无法保持原有的紧固状态,给整个电梯系统带来非常大的安全隐患。
技术实现要素:
5.本发明的目的是针对现有的技术存在上述问题,提出了一种能够防止曳引机倾覆且增强电梯安全性的支撑力可调的无机房减震装置。
6.本发明的目的可通过下列技术方案来实现:一种支撑力可调的无机房减震装置,包括:
7.底板,所述底板上设有承重区、安装区以及至少两个过渡区,所述安装区内设有多个第一弹块,每个所述过渡区内均设有多个第二弹块,所述承重区内设有多个第三弹块;
8.安装板,设于底板上,所述安装板与底板之间穿设有多个减震组件;所述安装板位于承重区处穿设有至少两个触发组件,所述触发组件与底板之间电连接有警报器,当触发组件接触底板时,警报器发出警报。
9.在上述的一种支撑力可调的无机房减震装置中,每个所述第一弹块、每个第二弹块以及每个第三弹块的形状、大小以及弹力均相同。
10.在上述的一种支撑力可调的无机房减震装置中,所述第三弹块的数量大于第一弹块的数量。
11.在上述的一种支撑力可调的无机房减震装置中,每个所述过渡区内的第二弹块的数量均相同,所述第一弹块的数量大于一个过渡区内的第二弹块的数量。
12.在上述的一种支撑力可调的无机房减震装置中,每个所述减震组件均包括穿过安装板与底板的减震螺栓,所述减震螺栓的一端上设有固定螺母。
13.在上述的一种支撑力可调的无机房减震装置中,所述减震螺栓上套设有减震套,该减震套位于减震螺栓的头部与安装板之间。
14.在上述的一种支撑力可调的无机房减震装置中,每个所述触发组件均包括与警报器电连接的触发螺栓,所述触发螺栓上连接有限位螺母,所述限位螺母与安装板之间具有挤压力。
15.在上述的一种支撑力可调的无机房减震装置中,所述触发螺栓与底板之间具有预留间隙。
16.在上述的一种支撑力可调的无机房减震装置中,计算第一弹块数量、第二弹块数量与第三弹块数量的步骤包括:
17.对安装于安装板上的曳引机与安装板的固定模型进行受力分析:
18.由于曳引机通过四组减震组件连接固定于安装板上,以曳引机的质心为坐标原点o,曳引轮的水平径向为x轴,曳引轮的轴向为y轴,曳引轮的铅垂径向为z轴构建了空间直角坐标系,并建立相应的模型,当建立后该模型为一次超静定结构,此处,将以力法求解该超静定结构,便可求得安装板对曳引机的支反力;
19.对底板进行受力分析:
20.由于安装板与底板之间装有不同组合的减震模块,即安装区内的四个支点、两个过渡区的两个支点与一个承重区的一个支点,将每个减震模块与安装板的接触部位视作一个支撑点,仍然以曳引机的质心为坐标原点o,安装于曳引机上的曳引轮的水平径向为x轴,曳引轮的轴向为y轴,曳引轮的铅垂径向为z轴构建了空间直角坐标系,并建立相应的模型,当建立后该模型为高次超静定结构,此处,同样可以力法求解该超静定结构,便可求得模型中各个减震模块支撑点的支反力的大小;根据不同的支反力之间的比值,取其反比,便是各支撑点处减震模块的刚度比值,然后,选出的第一弹块或者第二弹块或者第三弹块的硬度值固定时,便可计算出安装区内第一弹块的数量、过渡区内第二弹块的数量以及承载区内第三弹块的数量。
21.与现有技术相比,本发明具有以下有益效果:
22.1、曳引机位于安装区的正上方,曳引机上的曳引轮位于承重区的正上方,因此,当曳引机工作时,曳引机对安装板的作用力会被第一弹块抵消,曳引轮所受的作用力会被第三弹块抵消,而第二弹块会抵消部分曳引机的作用力以及抵消部分曳引轮的作用力,以使得该减震装置能够更好的支撑曳引机与安装板。
23.2、通过多个减震组件的设置,不仅能够实现安装板与底板之间的连接,并且该减震组件还能吸收安装板相对底板的跳动力,再者,能使安装板紧贴在第一弹块、第二弹块以
及第三弹块的上端面。
24.3、第三弹块的数量大于第一弹块的数量,每个所述过渡区内的第二弹块的数量均相同,所述第一弹块的数量大于一个过渡区内的第二弹块的数量,如此,承重区内产生的弹力会大于安装区内产生的弹力,使得承重区能够更好的抵消曳引轮对安装板作用力,即,便可有效控制安装板相对底板的倾覆情况,使得曳引机能够在该减震装置上稳定工作。
25.4、在现场实施安装过程中,人们可根据曳引机的机型与力学分析等条件,合理的布置安装区内第一弹块的数量、过渡区内第二弹块的数量与承重区内第三弹块的数量,以使得组装后的减震装置能够符合各类电梯的工作需求,并避免曳引机发生倾覆的情况。
26.5、安装板位于承重区处穿设有至少两个触发组件,触发组件与底板之间电连接有警报器,当触发组件接触底板时,警报器发出警报提示相关负责人,该该减震装置存在倾覆风险,与此同时,控制电梯的控制系统停止电梯的正常运行,如此,便可大大减小了主机的倾覆风险。
27.6、该触发组件接通报警器,电梯停止运行,以上是触发组件在电气方面的作用,还有一个机械方面的作用,就是当预留间隙压缩殆尽,触发组件接触到底板时,触发组件会依靠其自身的高强度顶住底板,支撑住安装板使其不再压缩减震装置,避免曳引机的进一步倾覆,从而避免安全事故的发生。
附图说明
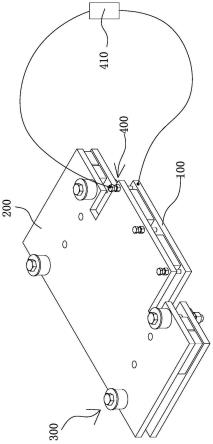
28.图1是无机房减震装置的结构示意图。
29.图2是底板的结构示意图。
30.图3是将曳引机安装于无机房减震装置的组装图。
31.图4是步骤1中各组不同的载荷组成空间平面力系的分析图。
32.图5是步骤1中y轴上的力学模型,并简化为简支梁的模型图。
33.图6是图5解除多余支座,并以多余约束力代替后的模型图。
34.图7是步骤2中各组不同的载荷组成空间平面力系的分析图。
35.图8是步骤2中x轴上的模型,并简为连续梁的模型图。
36.图9是图8解除多余的支座,以多余的弯矩代替后的模型图。
具体实施方式
37.以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
38.如图1—图3所示,本发明一种支撑力可调的无机房减震装置包括底板100、承重区110、安装区120、过渡区130、第一弹块121、第二弹块131、第三弹块111、安装板200、减震组件300、触发组件400以及警报器410。
39.底板100上设有承重区110、安装区120以及至少两个过渡区130,所述安装区120内设有多个第一弹块121,每个所述过渡区130内均设有多个第二弹块131,所述承重区110内设有多个第三弹块111,安装板200设于底板100上,所述安装板200与底板100之间穿设有多个减震组件300,在安装前,人们需根据曳引机在正常工作时的力学分析,选择出不同数量的第一弹块121、第二弹块131以及第三弹块111,并将第一弹块121安装在安装区120内,将
第二弹块131安装在过渡区130内,将第三弹块111安装在承重区110内,此后,通过多个减震组件300将安装板200安装在底板100上,以完成该减震装置的组装,之后,人们需要将适用于该减震器的曳引机210安装在安装板200上,并使得曳引机位于安装区120的正上方,曳引机上的曳引轮220位于承重区110的正上方,因此,当曳引机工作时,曳引机对安装板200的作用力会被第一弹块121抵消,曳引轮所受的作用力会被第三弹块111抵消,而第二弹块131会抵消部分曳引机的作用力以及抵消部分曳引轮的作用力;其次,通过多个减震组件300的设置,不仅能够实现安装板200与底板100之间的连接,并且该减震组件300还能吸收安装板200相对底板100的跳动力,再者,能使安装板200紧贴在第一弹块121、第二弹块131以及第三弹块111的上端面。
40.进一步的,第三弹块111的数量大于第一弹块121的数量,每个所述过渡区130内的第二弹块131的数量均相同,所述第一弹块121的数量大于一个过渡区130内的第二弹块131的数量,如此,承重区110内产生的弹力会大于安装区120内产生的弹力,使得承重区110能够更好的抵消曳引轮对安装板200作用力,即,便可有效控制安装板200相对底板100的倾覆情况,使得曳引机能够在该减震装置上稳定工作。
41.更进一步的,每个所述第一弹块121、每个第二弹块131以及每个第三弹块111的形状、大小、弹力以及所采用的材料均相同,如此,人们在制作该第一弹块121或者第二弹块131或者第三弹块111,都可以采用相同模具进行制作,如此,有效提高人们制作第一弹块121或者第二弹块131或者第三弹块111的效率;其次,在现场实施安装过程中,人们可根据曳引机的机型与力学分析等条件,合理的布置安装区120内第一弹块121的数量、过渡区130内第二弹块131的数量与承重区110内第三弹块111的数量,以使得组装后的减震装置能够符合各类电梯的工作需求。
42.每个所述减震组件300均包括穿过安装板200与底板100的减震螺栓310,所述减震螺栓310的一端上设有固定螺母320,减震螺栓310上套设有减震套330,该减震套330位于减震螺栓310的头部与安装板200之间,在本发明中,该减震套330采用橡胶材料制作,因此,该减震套330具有一定的弹性,在安装时,人们需要将减震套330套在减震螺栓310上,再将减震螺栓310依次穿过安装板200与底板100,之后,将固定螺母320安装在减震螺栓310上,拧紧固定螺母320,使得减震螺栓310的头部与安装板200之间具有一定的预紧力,如此,便可将安装板200压制在第一弹块121、第二弹块131以及第三弹块111的上端面上,进一步的,当主机在工作时,其会发生抖动,因安装板200与主机直接连接,使得安装板200也会跟随主机抖动,而减震套330是设置在减震螺栓310的头部与安装板200之间,使得安装板200相对底板100跳动时,该减震套330便会吸收安装板200的跳动力,从而缓冲安装板200的跳动幅度或者吸收安装板200的跳动力,使得主机能够在安装板200上稳定工作;换句话说,当电梯轿厢在装载过程中,曳引机施加在安装板200上的载荷也越来越大,第一弹块121、第二弹块131与第三弹块111开始压缩,安装板200和底板100的间距慢慢缩小,此时预压缩的减震套330会通过自身压缩量的回弹来第一弹块121或者第二弹块131或者第三弹块111的压缩量,使得减震组件300始终处于紧固状态,防止其松动,使得无机房减震装置的安全性得到极大的保障。
43.进一步的,由于减震套330的硬度要小于第三弹块111的硬度,所以在减震套330做预压缩动作时,并不会压缩第三弹块111或者第二弹块131或者第一弹块121。
44.安装板200位于承重区110处穿设有至少两个触发组件400,所述触发组件400与底板100之间电连接有警报器410,当触发组件400接触底板100时,警报器410发出警报。
45.每个所述触发组件400均包括与警报器410电连接的触发螺栓420,所述触发螺栓420上连接有限位螺母430,所述限位螺母430与安装板200之间具有挤压力,触发螺栓420与底板100之间具有预留间隙440,在正常使用过程中,该预留间隙440始终存在,即,此时的触发螺栓420与底板100并不会接触,使得警报器410不会发出警报。
46.当第二弹块131或第三弹块111由于老化或者其他的一些非正常因素发生失效时,其变形量将大大超出设计值,预留间隙440完全消失,接触螺栓与底板100接触,警报器410工作并发出警报提示相关负责人,该该减震装置存在倾覆风险,与此同时,控制电梯的控制系统停止电梯的正常运行,如此,便可大大减小了主机的倾覆风险。
47.当第一弹块121由于老化或者其他的一些非正常因素发生失效时,其变形量将大大超出设计值,即,此时的安装板200与底板100之间出现倾覆情况,且当人们在不知情的情况下开启电梯运行,曳引机与安装板200相对底板100的抖动幅度便会增加,导致预留间隙440时有时无,而当预留间隙440没有时,警报器410便会产生警报,如此,人们便可接收到间歇性警报,返之,人们便可根据该间隙性的警报,精确的判断出是第一弹块121发生损坏。
48.如图4—图9所示,以下是本发明对第一弹块、第二弹块以及第三弹块数量的计算过程:
49.步骤1、对曳引机与安装板的固定模型进行受力分析,由于曳引机通过4组减震组件连接固定于安装板上,以曳引机的质心为坐标原点o,曳引轮的水平径向为x轴,曳引轮的轴向为y轴,曳引轮的铅垂径向为z轴构建了空间直角坐标系,并引入该模型中各组不同的载荷组成空间平面力系如图4所示。其中:
50.a、b、c、d分别为曳引机与安装板固定的4个点;
51.l1为曳引轮直径的一半;
52.l2为钢丝绳中心到靠近曳引轮侧固定点的距离;
53.l3为曳引机宽度方向(或沿曳引轮径向)固定点的距离;
54.l4为曳引机深度方向(或沿曳引机轴向)固定点的距离;
55.p1为轿厢侧钢丝绳作用在曳引轮上的载荷;
56.p2为对重侧钢丝绳作用在曳引轮上的载荷;
57.rfa、rfb、rfc、rfd为安装板对曳引机的支反力。
58.由图示不难得出,该模型为一次超静定结构。此处,将以力法求解该超静定结构。
59.先列出其中基本静定系部分的静力平衡方程:
60.∑fz=rfa+rfb+rfc+rf
d-p
1-p2=0
[0061][0062][0063]
y轴上的力学模型可简化为简支梁模型如图5所示。
[0064]
解除a(b)处的多余支座,并以多余约束力x1代替,如图6所示。
[0065]
x1是一个未知力,其大小为rfa+rfb[0066]
记单独p1和p2在a(b)处引起的位移为δ
1p
[0067]
记单独x1在a(b)处引起的位移为
[0068]
记p1、p2和x1一起在a(b)处引起的位移为δ1[0069]
因a(b)原来就有一个铰支座,它在x1的方向上不应有任何位移,所以可得变形协调方程:
[0070][0071]
由莫尔定理可求出
[0072][0073]
即:
[0074][0075]
将之与之前的三组静力平衡方程联立,由于其他所有参数均为已知,则可求出rfa、rfb、rfc和rfd的值。
[0076]
步骤2、对底板进行受力分析:由于安装板与底板之间装有不同组合的减震模块(分别为安装区内的四个支点、两个过渡区的两个支点与一个承重区的一个支点,),将每个减震模块与安装板的接触部位视作一个支撑点,仍然以曳引机的质心为坐标原点o,曳引轮的水平径向为x轴,曳引轮的轴向为y轴,曳引轮的铅垂径向为z轴构建了空间直角坐标系,并引入该模型中各组不同的载荷组成空间平面力系如图7所示。
[0077]
其中:
[0078]
7个铰支座分别代表7个减震模块的支撑点;
[0079]
pa、pb、pc、pd分别为安装板与曳引机固定的4个点上受曳引机作用的载荷,由于该作用力是对应的安装板作用于曳引机上的支反力的反作用力,所以他们的大小分别与上述内容中计算的rfa、rfb、rfc和rfd相等,而方向对应相反;
[0080]
rf1~rf7分别为各个橡胶模块对于安装板的在各个简支点的支反力;
[0081]
l1~l
13
是各个作用点之间在x轴或y轴上的距离。
[0082]
由图示不难看出,该模型为高次超静定结构。此处,同样可以力法求解该超静定结构。先列出其中基本静定系部分的静力平衡方程:
[0083]
x轴上的模型可简化为连续梁模型如图8所示。
[0084]
将中间每个支座处的梁截面切开,则两侧截面上的弯矩是大小相等、转向相反的一对力偶,与其对应的位移是两侧截面的转角,解除多余的支座,以多余的弯矩mn代替,如图9所示。
[0085]
由于梁的轴线在支座上是光滑连续的,所以各个支座处的梁截面不应有相对转角,则可根据莫尔定理,列出三弯矩方程:
[0086][0087]
方程式中,ωn为跨度ln内的弯矩图面积,an为该弯矩图面积的形心到左端支点的
距离,b
n+1
为载荷单独作用下,跨度l
n+1
范围内弯矩图面积ω
n+1
的形心到右端支点的距离,图示中的连续梁共可截为6段,则可取n=1,2,3,4,5,6;公式中的l1~l6对应到图示中的距离值分别为:l1=l1+l2,l2=l3,l3=l4,l4=l5,l5=l6,l6=l7+l8,具体的l1~l2为m0与m1的跨度、l3为m1与m2的跨度、l4为m2与m3的跨度、l5为m3与m4的跨度、l6为m4与m5的跨度、l7~l8为m5与m6的跨度,并且m0与m6为端点,并无弯矩,数值均为0。
[0088]
对于连续梁的每一个中间支座都可以列出一个三弯矩方程,所以对于上述模型,可列出5个三弯矩方程,联立5个三弯矩方程,可分别求得m1、m2、m3、m4、m5的值,通过该计算所得的值,代入到之前的静力平衡方程,便可求得模型中各个减震模块支撑点的支反力rf1~rf7的大小。
[0089]
根据不同的支反力之间的比值,取其反比,便是各支撑点处减震模块的刚度比值,然后,根据选择出的第一弹块或者第二弹块或者第三弹块的硬度值,便可计算出安装区内第一弹块的数量、过渡区内第二弹块的数量以及承载区内第三弹块的数量。
[0090]
而不同载重、不同布置方式的无机房电梯,均可通过构建与之相符合的空间平面力系来对设计支撑点的减震模块刚度加以求解,从而设计出符合使用要求的减震模块,可实现大批量的个性化定制。
[0091]
需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
[0092]
另外,在本发明中如涉及“第一”、“第二”、“一”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
[0093]
在本发明中,除非另有明确的规定和限定,术语“连接”、“固定”等应做广义理解,例如,“固定”可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0094]
另外,本发明各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1