一种新型的应用于管道不停输抢维作业的封堵导流机器人的制作方法
本发明涉及石油天然气管道抢维,更具体的是涉及新型的应用于管道不停输抢维作业的封堵导流机器人。
背景技术:
1、随着国民经济的快速发展和工业化水平的提高,我国对石油、天然气等化石能源需求快速增加。管道运输作为石油、天然气运输中最快捷、经济、可靠的运输方式,被称为油气田生命线工程,其稳定和高效安全的运输状态是保证国民经济良好运行的必要保障,是战略性的工程。我国在油气运输管网的建设力度和建设规模已经位居世界前列,但管道长度的增加和服役时间的增长,也产生了许多的维抢工作,且输油气管网大多数布局在野外和不易经常监测的地区,管网的快速维修和及时更换还不能在大范围内得到很好的满足,尤其在野外情况下,想要及时更换则变得更加艰难。管道机器人可以在管道内进行封堵,提高输送管道维抢的效率和安全性。
2、封堵机器人在国外研究起步较早,目前已有较为成熟的产品,在国内封堵机器人虽然已有一定研究,但产品水平仍然有待继续提升,且目前已知的管道机器人装置封堵作业需要终止运输,对管道运输产生影响,产生相应的经济损失。因此,快速解决管道泄漏并能保证管道继续运输油气的快速封堵和导流装置的研发就显得十分必要。
3、虽然目前国内外的研究学者在管道机器人方向已经做了做了大量的研究,但保障管道能不停工的管道机器人的开发及流场分析机理上进行的研究还较少。如何解决上述技术问题成了本领域技术人员的努力方向。
技术实现思路
1、本发明的目的在于:为了解决埋地管道作业过程中发生泄漏,不能快速处理以及最大化程度的减少管道破损裂缝给工程运输作业带来的影响的技术问题,本发明提供一种新型的应用于管道不停输抢维作业的封堵导流机器人。本装置的主要功能是在管道破裂的地方实施动态封堵,发现破裂裂缝后,机器人行进到此处,封堵系统的气囊通过充气泵充气,密封气囊鼓起与管道紧密接触,在破裂处密封形成密封区,此时管道中的液体将通过中间的小旁通导流管流走。以实现在对工程运输作业影响最小的情况下完成对管道的检修。
2、本发明为了实现上述目的具体采用以下技术方案:
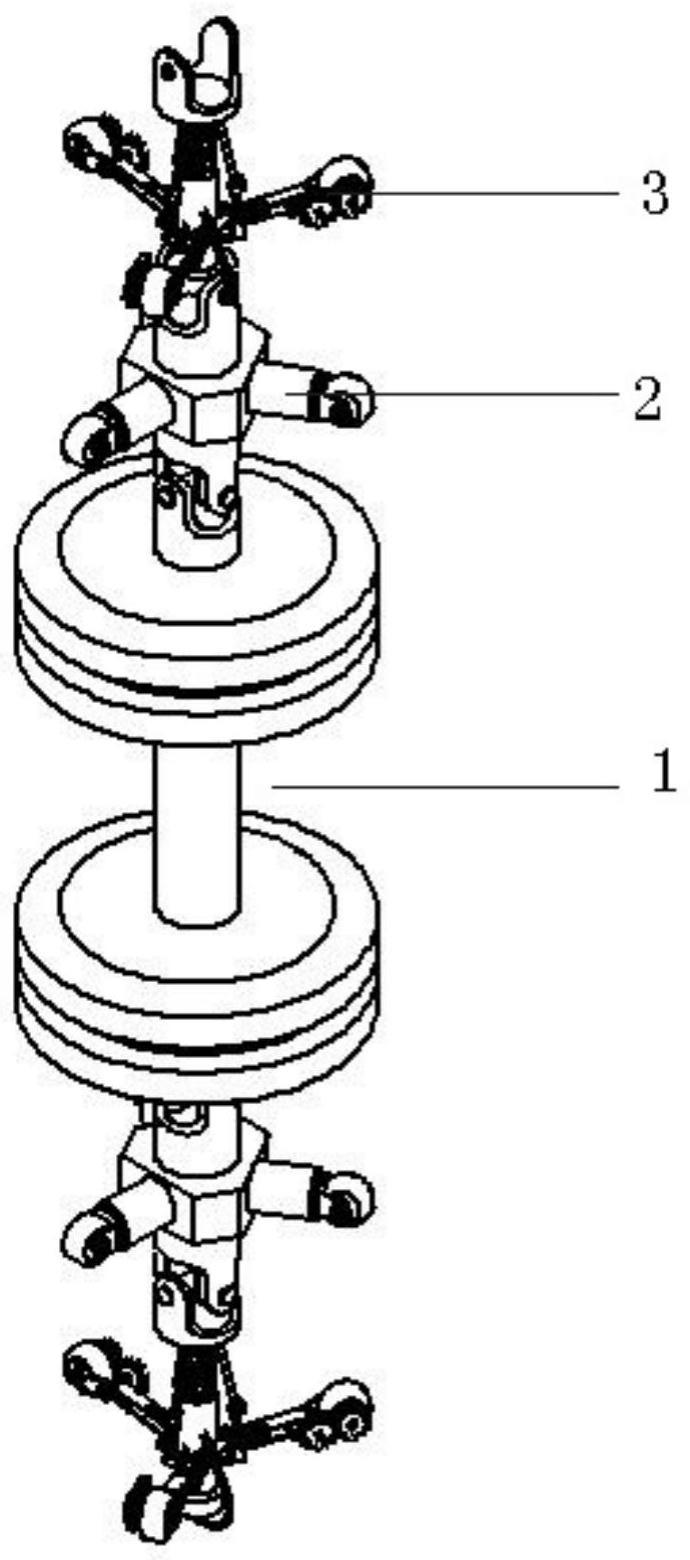
3、一种新型的应用于管道不停输抢维作业的封堵导流机器人,包括能够对管道中所输送的介质进行导流疏通的密封导流装置、对称设置在密封导流装置两侧的两个牵引支撑单元,每个牵引支撑单元均包括机器人动力装置和支撑部分,所述同一侧的机器人动力装置和支撑部分之间、支撑部分与密封导流装置对应侧之间均设置有实现弯道自适应的万向联轴器。
4、进一步地,所述密封导流装置包括可以对管道中所输送的介质进行导流疏通的旁通导流管、设置在旁通导流管上的两个密封支撑架和设在两个密封支撑架上的可与管道内壁密封贴合的两个充气密封组件,两个充气密封组件在管道破裂处密封构成密封区,所述旁通导流管两端均设置有万向联轴器连接头。
5、进一步地,所述充气密封组件包括套设在密封支撑架外的气囊组件和设置在密封支撑架内给气囊组件充气的充气泵组件,所述密封支撑架上设置有使气囊组件充气时径向膨胀的气囊固定装置。
6、进一步地,所述支撑部分包括连接杆和设置连接杆两端的万向联轴器接头,连接杆一端通过一个万向联轴器接头与机器人牵引装置连接,另一端通过另一个万向联轴器接头与密封导流装置连接。
7、进一步地,所述连接杆中部套设有安装座,安装座上按圆周均布有多个在作业时与管道内壁贴合的支撑轮组件,每个所述支撑轮组件包括按径向固定在安装座上的套筒、固定安装在套筒内的弹簧、连接在弹簧延伸出套筒的自由端上的支撑轮。
8、进一步地,所述机器人动力装置包括液压缸体、设置在液压缸体内的活塞杆、设在活塞杆顶部的万向联轴器连接头、按圆周均布在缸体上的三个角度可以调节的驱动支撑架、安装在每个驱动支撑架上的与管道内壁贴合的驱动轮组件、安装在每个驱动支撑架上驱动对应驱动轮组件转动的动力组件、实现驱动支撑架角度调节的推杆摇杆机构和自适应弹簧,所述推杆摇杆机构一端与万向联轴器连接头连接,另一端与驱动支撑架连接,所述自适应弹簧套设在万向联轴器连接头下方的活塞杆上,一端与万向联轴器连接头下方固定连接,另一端与液压缸体固定连接。
9、进一步地,所述液压缸体上设有用于安装驱动支撑架的定位安装座,定位安装座内设置有安装螺柱,所述驱动支撑架均包括方向框架本体、按长度方向设置在方向框架本体一端的且与定位安装座内安装螺柱配合的螺纹孔一,按长度方向设置在方向框架本体另一端的用于安装驱动轮组件的螺纹安装孔二。
10、进一步地,所述推杆摇杆机构包括相互铰接的推杆机构和摇杆机构,所述推杆机构自由端与万向联轴器连接头底部螺纹连接,所述摇杆机构自由端与对应定位安装座内的安装螺柱螺纹连接。
11、推杆摇杆机构的在设计时候,将推杆机构的一端(上端)设计为t字形状的两层的凸台结构,凸台上部结构处设有螺纹,装配时和液压缸活塞杆顶部的螺纹孔连接机构内,并拧紧配合,推杆机构的另外一端(下端)设计成和上端镜像相反的t字形状凸台
12、摇杆机构的另外一端做成杆端轴承的形状但是杆端和螺杆进行螺纹连接,螺杆和驱动轮支撑架上的螺纹孔也进行螺纹连接,驱动轮支撑架绕着螺杆做一定角度范围的摆动,实现机器人在管道运输工程中的多直径自适应。本装置中设计的推杆摇杆机构除连接配合外的部分均设计成圆柱杆状,目的是减少工程运输管道中给介质运输带来的阻力。最大限度减少管内机器人对原有的介质运输带来的影响。
13、进一步地,所述驱动轮组件包括组合安装架,所述组合安装架一端设置有通过纹安装孔二的螺柱组件a,所述组合安装架另一端通过螺柱组件b设置有驱动轮,所述螺柱组件a和螺柱组件b延伸出组合安装架的同一侧分别套设有相互啮合的圆柱齿轮a和圆柱齿轮b,所述动力组件驱动螺柱组件a转动。
14、进一步地,所述动力组件安装在方向框架本体内部,所述动力组件为驱动电机,对应的驱动电机的输出轴上套有主动锥齿轮,所述螺柱组件a上设置有与主动锥齿轮啮合的从动锥齿轮。
15、本发明的有益效果如下:
16、1、本发明中,牵引支撑单元设置为前后串联两组,给整个机构提供充足的动力,可实现快速的进退运动,机器人动力装置和密封导流装置以及支撑部分用万向联轴器连接,可实现弯道自适应,灵活应工作于多种不同曲率的管道状况下,针对所述的特殊工况和使用需求,本专利提出了一种轮式可进行快速封堵和导流的机器人的设计,可以很好地处理埋地管道的泄漏和保证管道连续工作,弥补了管道机器人开发研究上的空缺。
17、2、该装置能够顺利到达管道破裂的地方实施动态封堵,发现破裂裂缝后,机器人行进到此处,封堵系统的气囊通过充气泵充气,密封气囊鼓起与管道紧密接触,在破裂处密封形成密封区,此时管道中的液体将通过中间的小旁通导流管流走,以实现在管道不停输的情况下完成对管道的抢维修。
18、3、封堵导流装置的主要功能是在管道破裂的地方实施动态封堵,发现破裂裂缝后,机器人行进到此处,由于封堵导流装置的气囊组件套设在支撑架上,并通过气囊固定装置对气囊充气时的膨胀方向进行限制,使得密封装置只能在径向膨胀,实现密封。封堵导流装置两端上下共设有两个充气密封组件,每个充气密封组件有两个腔和两个充气泵,故该封堵导流装置总共四个密封气囊,四个密封气囊分别由四个充气泵进行充气,为减少工作时候运输介质的工作阻力,本发明中将四个充气泵分别置于封堵导流装置支撑架内部。封堵导流装置开始工作时通过充气泵充气,密封气囊鼓起与管道紧密接触,在破裂处密封形成密封区,此时管道中的液体将通过中间的旁通导流管流走。
- 还没有人留言评论。精彩留言会获得点赞!