变径轮、带轮传动机构、腿部总成及机器人的制作方法
本申请涉及机器人,尤其涉及一种变径轮、带轮传动机构、腿部总成及机器人。
背景技术:
1、目前机器人领域中,多足机器人对于不同地形的环境适应能力强,被普遍认为在自然灾害的营救、工业监测、安防巡逻等有良好的应用前景,是近年来发展的热门方向。腿部作为机器人与环境直接交互的结构,驱动腿部活动的驱动机构和传动机构的性能,是机器人作业过程中重要的性能指标,将影响机器人的应用场景,例如,受传动机构固有的传动比影响,会出现转速难以满足要求的情况,进而使机器人的应用场景受限。
技术实现思路
1、本申请实施例提供一种变径轮、带轮传动机构、腿部总成及机器人,至少能够解决用于腿部总成的传动机构的传动比不可调节的问题。
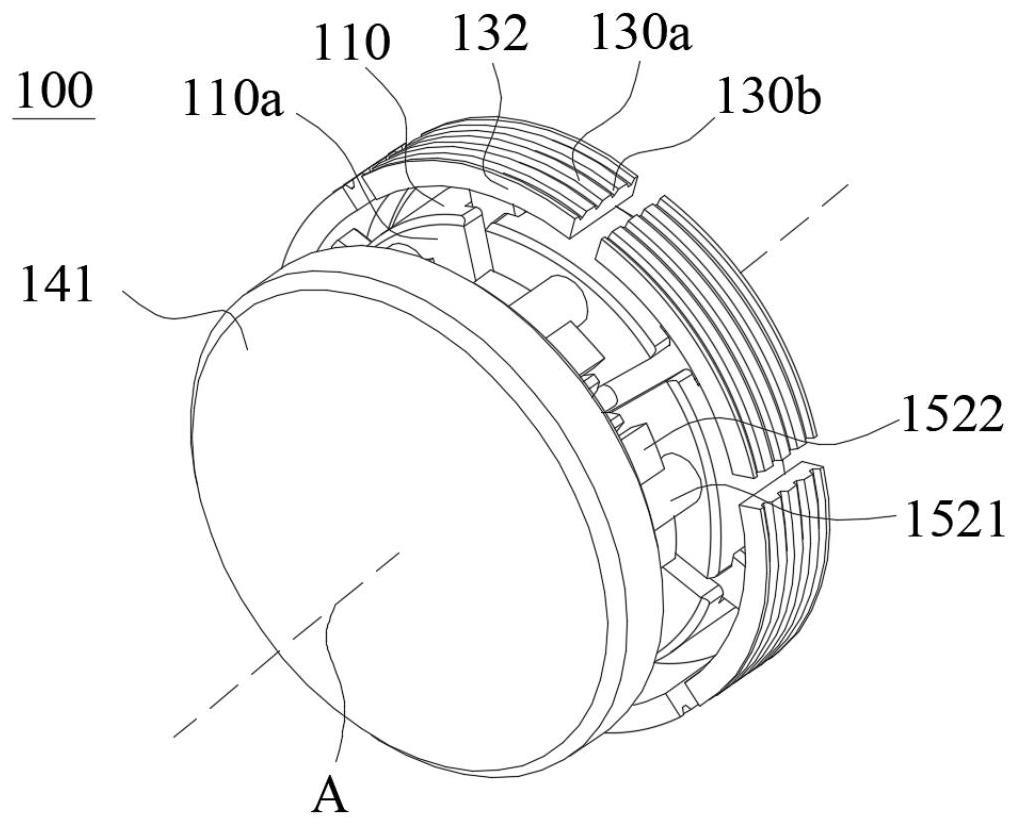
2、第一方面,本申请实施例提供了一种变径轮,用于机器人的腿部总成,所述变径轮包括:
3、固定架,具有中轴线;
4、至少一个活动件,各所述活动件活动设于所述固定架,各所述活动件具有背离所述中轴线的传动面;
5、传动架,对应所述固定架设置,且所述传动架与所述活动件相接触;及
6、驱动件,包括驱动主体和设于所述驱动主体的转动部,所述驱动主体连接所述固定架,所述转动部连接所述传动架,所述转动部可相对所述驱动主体转动,使得所述传动架可相对所述固定架绕所述中轴线转动,进而使所述传动架推动所述活动件远离或靠近所述中轴线,以调节所述传动面至所述中轴线的距离。
7、第二方面,本申请实施例提供了一种带轮传动机构,带轮传动机构包括:
8、驱动轮;
9、从动轮,与所述驱动轮间隔设置;及
10、传送件,套设于所述驱动轮和所述从动轮外围,以在所述驱动轮转动时,能够带动所述从动轮转动;
11、其中,所述驱动轮和所述从动轮中的至少一个为如上所述的变径轮,以能够调节所述驱动轮与所述从动轮的传动比。
12、第三方面,本申请实施例提供了一种腿部总成,腿部总成包括:
13、如上所述的带轮传动机构;及
14、两个载体,所述带轮传动机构的所述驱动轮设于其中一个所述载体、所述从动轮设于另一个所述载体。
15、第四方面,本申请实施例提供了机器人,机器人包括如上所述的腿部总成。
16、基于本申请实施例的变径轮、带轮传动机构、腿部总成及机器人,将变径轮用于带轮传动机构中,通过改变变径轮的轮径来改变带轮传动机构的传动比,并将带轮传动机构用于机器人的腿部总成中,以带动腿部总成的两个载体相对活动,从而实现用于腿部总成的传动机构的传动比可调。并且在带轮传动机构的驱动轮及从动轮均选用变径轮时,可以加大驱动轮与从动轮的传动比可调范围,满足更多使用需求,且驱动轮和从动轮轮的轮径变化各自独立,使腿部总成的活动更平稳。具体地,在腿部总成需要大力矩进行低频活动时可以切换带轮传动机构使其具有大传动比,在腿部总成需要小力矩进行高频活动时可以切换带轮传动机构使其具有小传动比,以使具有腿部总成的机器人能够在多种复杂的场景作业。
技术特征:
1.一种变径轮,其特征在于,用于机器人的腿部总成,所述变径轮包括:
2.根据权利要求1所述的变径轮,其特征在于,所述固定架具有沿所述中轴线方向相背分布的第一表面及第二表面,所述传动架和所述驱动主体均设于所述固定架的所述第一表面所在的一侧。
3.根据权利要求2所述的变径轮,其特征在于,所述传动架设于所述驱动主体与所述固定架之间,所述变径轮还包括:
4.根据权利要求1所述的变径轮,其特征在于,所述活动件的数量为多个;各所述活动件具有第一位置和第二位置,所述第二位置下所述传动面突出所述固定架的周壁面,且所述第二位置下所述传动面至所述中轴线的距离大于所述第一位置下所述传动面至所述中轴线的距离。
5.根据权利要求4所述的变径轮,其特征在于,在所述第一位置,多个所述活动件的所述传动面首尾拼接;在所述第二位置,多个所述活动件的所述传动面相互隔开;和/或
6.根据权利要求4所述的变径轮,其特征在于,所述传动架用于推动所述活动件沿所述固定架的径向活动以在所述第一位置和所述第二位置之间切换。
7.根据权利要求6所述的变径轮,其特征在于,
8.根据权利要求1所述的变径轮,其特征在于,所述活动件的传动面具有至少一个的防滑槽,各所述防滑槽绕所述中轴线设置,且当同一所述传动面上所述防滑槽的数量为多个时,多个所述防滑槽沿平行于所述中轴线的方向分布。
9.一种带轮传动机构,包括:
10.根据权利要求9所述的带轮传动机构,其特征在于,所述带轮传动机构还包括:
11.根据权利要求10所述的带轮传动机构,其特征在于,所述张紧机构设于所述驱动轮和所述从动轮之间,且所述张紧机构可沿第一直线方向运动以使所述传送件紧贴所述驱动轮和所述从动轮,所述第一直线方向垂直于所述中轴线。
12.根据权利要求10或11所述的带轮传动机构,其特征在于,所述张紧机构包括:
13.一种腿部总成,其特征在于,包括:
14.根据权利要求13所述的腿部总成,其特征在于,所述腿部总成还包括:
15.一种机器人,其特征在于,包括如上述权利要求13-14中任一项所述的腿部总成。
技术总结
本申请公开了一种变径轮、带轮传动机构、腿部总成及机器人,将变径轮用于带轮传动机构中,通过改变变径轮的轮径来改变带轮传动机构的传动比,并将带轮传动机构用于机器人的腿部总成中,以带动腿部总成的两个载体相对活动,从而提高用于腿部总成的传动机构的传动比可调范围。并且在带轮传动机构的驱动轮及从动轮均选用变径轮时,可以加大驱动轮与从动轮的传动比可调范围,满足更多使用需求,且驱动轮和从动轮轮的轮径变化各自独立,使腿部总成的活动更平稳。在腿部总成需要大力矩进行低频活动时可以切换带轮传动机构使其具有大传动比,在腿部总成需要小力矩进行高频活动时可以切换带轮传动机构使其具有小传动比,以使具有腿部总成的机器人能够在多种复杂的场景作业。
技术研发人员:刘叶青
受保护的技术使用者:OPPO广东移动通信有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!