一种降低振动噪声的摆线针轮行星传动装置的制造方法与流程
1.本发明属于传动装置设计及制造领域,具体涉及一种降低振动噪声的摆线针轮行星传动装置的制造方法。
背景技术:
2.摆线针轮行星传动与渐开线少齿差行星轮传动一样,同属k-h-v型行星齿轮传动,它的主要特征:行星轮齿廓为变幅外摆线的内测等距曲线,该类型的传动装置有传递功率大、传动比范围大、结构紧凑的特点。
3.一般来说,摆线轮针轮传动装置在正常工作中噪声声源主要有:传动装置本身齿轮啮合的动态激励;电机的振动以及工作机构的振动和负载变化等。在传动装置中,根据其不同的振动状态,可能产生两种噪声:拍击噪声和白噪声。拍击噪声是由齿轮的拍击引起的瞬态噪声,而齿轮拍击是一种强非线性的冲击现象,一般发生在轻载条件下。白噪声是一种稳态噪声,是由齿轮啮合过程中的动态激励引起的。当载荷密度较高时,振动和噪声将成为影响传动系统的可靠性、寿命和工作环境的关键因素。本发明提出了一种降低振动噪声的摆线针轮行星传动装置的制造方法,为设计开发出低振与低噪的摆线针轮减速器提供参考依据,也为解决该类型减速器的产业化提供参考。
技术实现要素:
4.针对现有传动装置振动噪声产生机理:齿轮啮合刚度的时变性、齿轮传递误差、啮入啮出冲击以及传动系统输入力矩和负载力矩的变化均会产生动态啮合力。由于这种动态啮合力的激励,使齿轮系统产生振动,从而引起齿轮系统的振动噪声。本发明提出了一种降低振动噪声的摆线针轮行星传动装置及其制造方法。
5.本发明的技术方案如下:
6.本发明首先提供了一种降低振动噪声的摆线针轮行星传动装置的制造方法,所述摆线轮针轮行星传动装置包括针齿壳、输出行星架,输入行星架、角接触轴承、摆线轮、滚针、曲柄轴、中心齿轮、花键齿轮轴、行星齿轮;其中,三个行星轮与输入齿轮啮合;三个行星轮分别固定安装在周向分布的三个花键齿轮轴上,三个花键齿轮轴与中心齿轮啮合传动;中心齿轮与曲柄轴固连,曲柄轴的凸轮上设置有圆柱滚子轴承;一对摆线轮装配在曲柄轴的凸轮部位;输出行星架穿过摆线轮上的通孔与输入行星架连接,针齿壳通过一对角接触轴承与两个行星架连接;滚针设置在针齿壳上;三个行星齿轮与三个花键轴齿轮组成等边三角形布置的双联齿轮,并分别与输入齿轮和中心齿轮啮合并等角速度旋转;
7.所述制造方法包括如下步骤:
8.1)优化齿轮啮合刚度的时变性问题
9.1.1)对于输入齿轮和三个行星齿轮构成的齿轮副,以及三个花键齿轮轴和中心齿轮构成的齿轮副,在满足弯曲疲劳强度和模数大于最低允许模数的前提下,齿轮副中的尺寸选取模数最小的标准模数齿轮;
10.1.2)使步骤1.1)中的两组齿轮副的三个啮合侧隙保持一致,三个啮合侧隙的装配极差在
±
0.01mm以内;
11.1.3)使齿轮啮合的同时配对啮合的轮齿的对数εr大于1.2;
12.1.4)通过加工过程控制花键轴齿轮、行星齿轮、输入齿轮的齿根修形量δ2 和齿顶的修形控制δ1以补偿轮齿在从齿根到齿顶啮合的过程稳定的弹性变形,其中,花键轴齿轮花键轴齿轮,行星齿轮和输入齿轮的齿根修形量小于0.015mm,齿根修缘量小于0.006mm;
13.2)优化齿轮传递误差的激励;
14.3)优化避免轮齿啮入啮出冲击
15.3.1)输入齿轮、行星齿轮、花键轴齿轮的齿形中线弧高向齿轮实体外偏离为“正”,反之为“负”,加工时轮齿实际齿形在齿形的中心上下均匀的偏离,齿形中心局部齿形中凹量小于齿形误差规定值,中凹区域不能超过0.25(ebp-sbp),且齿形中凹区域不能出现在齿轮根部;其中,ebp为齿轮实际啮合中止圆直径, sbp为实际啮合渐开线起始圆直径;
16.3.2)输入齿轮、行星齿轮、花键轴齿轮的实际齿向线在齿向中心上下均匀的偏离,不能允许齿向中线局部齿向线中凹超过齿向误差f
fβ
规定值以上;
17.3.3)输入齿轮、行星齿轮、花键轴齿轮齿向修鼓形;
18.4)优化行星架、滚针轴承的结构;
19.5)根据步骤1)-步骤4)优化后得到的各组件结构组装摆线针轮行星传动装置。
20.作为本发明的优选方案,所述的步骤1.2)使两组齿轮副的三个啮合侧隙保持一致具体为:
21.输入齿轮和行星齿轮采用热后磨齿工艺保证轮齿的齿距累积误差小于0.01 mm,公法线变动量小于0.01mm;确保输入齿轮和三个行星齿轮的啮合侧隙保持一致;
22.控制中心齿轮异性孔与外齿中心的对称度误差在0.005mm以内,确保中心齿轮与三个花键轴齿轮的啮合侧隙一致。
23.作为本发明的优选方案,所述步骤1.3)使齿轮啮合的同时配对啮合的轮齿的对数εr大于1.2,并且趋近为整数,优选为2。
24.作为本发明的优选方案,所述的步骤2)具体为:
25.影响输入齿轮、行星齿轮、花键轴齿轮振动的主要误差是齿形误差ff、基节误差f
pb
,齿形误差和基节误差加工时控制量e(t)由轮齿啮合对数εr、齿轮误差的幅值er、齿轮的转速n、齿轮的齿数z、齿轮的运行时间t决定,其公式为:控制齿形误差和基节误差加工时控制量使齿形误差ff和基节误差f
pb
小于设定值。
26.作为本发明的优选方案,所述步骤4)具体为:
27.在行星架输出端增设凸台,增加输出端的刚度,使工作过程中行星架输出端的固有频率增加,在行星架输入端设置镂空结构降低行星架输入端的固有频率。
28.作为本发明的优选方案,将圆柱滚子轴承常规的钢保持架保组件材料优化成聚四氟乙烯材料,滚针轴承高速运转过程中聚四氟乙烯材料的将降低轴承产生的固有频率,能够促使减速器箱体不易产生振动,起到减振降噪的效果。
29.与现有技术相比,本发明所具有的有益效果有:
30.(1)本发明通过三个行星齿轮与三个花键轴齿轮组成等边三角形布置的双联齿轮
与输入齿轮和中心齿轮啮合并等角速度旋转,来保证输入齿轮和行星轮所受的啮合呈三角形的稳态,输入齿轮和行星轮齿轮啮合时的受力的三角形稳态会让其啮合刚度处于稳态。
31.(2)本发明加工时需要保证轮齿实际齿形在齿形的中心上下均匀的偏离;控制齿形中凹能够保证齿轮啮合时齿与齿的受力均衡,提高齿部的啮合刚度,减少齿与齿的冲击,从而降低噪音。
32.(3)本发明的输入齿轮、行星齿轮、花键轴齿轮齿向要求修鼓形,向修鼓形能够保证在承载时齿轮啮合时齿部的啮合刚度,减少齿轮啮入啮出的冲击,从而降低噪音。
33.(4)本发明的行星架的输出端输出减速器的功率,需要承受较大载荷,在行星架输出端增设凸台,能够增加输出端的刚度,使工作过程中行星架输出端的固有频率增加,而行星架的输入端承受载荷小,设置镂空结构降低行星架输入端的固有频率,工作过程中输出端带动输入端转动,输出端与输入端的刚性的差异和固有频率的差异,促使箱体不易产生振动,起到了明显的减振降噪效果。
附图说明
34.图1为行星齿轮与输入齿轮的工况示意图;
35.图2为花键轴齿轮与输中心齿轮工况示意图;
36.图3为中心齿轮异形孔与外齿的工艺要求示意图;
37.图4为齿形齿向示意图;
38.图5为齿形曲线示意图;
39.图6为发生中凹时的齿形曲线示意图;
40.图7为齿轮齿向曲线示意图;
41.图8为齿轮齿向修形示意图;
42.图9为行星架结构示意图;
43.图10为聚四氟乙烯滚针轴承示意图;
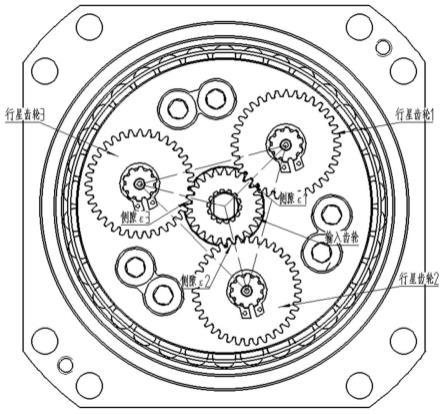
44.图11为中心齿轮、花键轴齿轮、输入齿轮啮合示意图;
45.图12为新型减速器的主剖视图;
46.图13为减速器噪音试验示意图;
47.图14为试验一的1#麦克风的频谱图;
48.图15为试验一的2#麦克风的频谱图;
49.图16为试验二的1#麦克风的频谱图;
50.图17为试验二的2#麦克风的频谱图。
具体实施方式
51.下面结合具体实施方式对本发明做进一步阐述和说明。所述实施例仅是本公开内容的示范且不圈定限制范围。本发明中各个实施方式的技术特征在没有相互冲突的前提下,均可进行相应组合。
52.如图1、2、9-12所示,本发明提供了一种降低振动噪声的摆线针轮行星传动装置,所述摆线轮针轮行星传动装置包括针齿壳6、输出行星架2,输入行星架8、角接触轴承19、摆线轮16、滚针7、曲柄轴15、中心齿轮21、花键齿轮轴11、行星齿轮10;其中,三个行星轮与输
入齿轮啮合;三个行星轮分别固定安装在周向分布的三个花键齿轮轴11上,三个花键齿轮轴11与中心齿轮啮合传动;中心齿轮21与曲柄轴15固连,曲柄轴15的凸轮上设置有圆柱滚子轴承;一对摆线轮16装配在曲柄轴的凸轮部位;输出行星架2穿过摆线轮上的通孔与输入行星架8连接,针齿壳6通过一对角接触轴承19与两个行星架连接;滚针 7设置在针齿壳6上;三个行星齿轮与三个花键轴齿轮组成等边三角形布置的双联齿轮,并分别与输入齿轮和中心齿轮啮合并等角速度旋转。
53.上述摆线针轮行星传动装置噪音振动贡献值最大的部位为高转速的第一级和第二级的减速机构,其包含的零件为渐开线齿形的齿轮:中心齿轮、花键轴齿轮、行星齿轮。为解决降低摆线针轮传动装置的振动和噪音,在于通过齿轮加工制造来解决:1、优化齿轮啮合刚度的时变性问题;2通过设备和工艺保证齿轮加工精度来保证齿轮传递的误差;3、通过特殊的制造修形优化或避免轮齿啮入啮出冲击;4、通过优化除齿轮外传动装置的轴承,行星架等其他零件的结构,来优化其刚度和固有频率的差异,从而优化传动装置刚度激励产生的振动噪音。
54.一、优化齿轮啮合刚度的时变性问题:
55.如图1所示,本发明首先通过三个行星齿轮与三个花键轴齿轮组成等边三角形布置的双联齿轮与输入齿轮和中心齿轮啮合并等角速度旋转,来保证输入齿轮和行星轮所受的啮合呈三角形的稳态,输入齿轮和行星轮齿轮啮合时的受力的三角形稳态会让其啮合刚度处于稳态,从而减少啮合振动和噪音。
56.在制造过程,在满足弯曲疲劳强度的前提下,降低齿轮的模数。由于d=mz,行星齿轮、花键轴齿、输入齿轮的中心距d一定时,齿轮模数m越小,齿数z 越多,重叠系数越大,同时配对啮合的齿轮对数越多,啮合刚度越好,从而能够降低齿轮传动的噪声。一般情况下,齿轮是按照标准模数设计的,而有一个最小的允许值是理论值,这个理论值不是标准模数,所以不常用,所以只需要降低齿轮模数比允许的理论值大的标准模数就可以了。
57.参照图1和图2,输入齿轮和行星齿轮采用热后磨齿工艺保证轮齿的齿距累积误差f
p
小于0.01mm,公法线变动量fw小于0.01mm,来保证输入齿轮和3 个行星齿轮,3个花键轴齿轮和中心齿轮的啮合侧隙保持一致,即ε1,ε2,ε 3,三者装配极差在
±
0.01mm以内,一致的啮合侧隙误差能够保证行星齿轮与输入齿轮在周向能够同时啮合,从来避免出现偏载造成的啮合刚度周期性的变化,从而减少啮合振动和噪音。
58.参照图3,控制花键轴齿和中心齿轮异性孔与外齿中心的对称度误差在 0.005mm以内,能保证中心齿轮与三个花键轴齿轮的啮合侧隙一致,一致的啮合侧隙误差能够保证花键轴齿轮与中心齿轮在周向能够同时啮合,从来避免出现偏载造成的啮合刚度周期性的变化,从而减少啮合振动和噪音。
59.进一步的通过制造工艺保证齿轮啮合的同时配对啮合的轮齿的对数εr应大于1.2,且尽量趋近为整数。啮合过程中同时参与啮合的轮齿对数随时间作周期变化。同时配对啮合的轮齿啮合对数多且啮合的对数稳定,能够保持良好的啮合刚度,从而减少振动和噪音。
60.参照图4,通过加工过程来控制齿根修形量δ2和齿顶的修形量δ1来补偿轮齿在从齿根到齿顶啮合的过程稳定的弹性变形,花键轴齿轮,行星齿轮和输入齿轮的齿顶修形量小于0.015mm,齿根修缘量小于0.006mm,通过合理的修形量来减少齿轮啮合过程中齿根
到齿顶的刚度的变化,来减少振动和噪音。
61.二、优化齿轮传递误差的激励齿轮啮合误差是由齿轮加工误差和安装误差引起的,这些误差使齿轮啮合齿廓偏离理论的理想啮合位置,破坏了渐开线齿轮的正确啮合方式,使齿轮瞬时传动比发生变化,造成齿与齿之间碰撞和冲击,产生了齿轮啮合的误差激励。
62.影响输入齿轮、行星齿轮、花键轴齿轮振动的主要误差是齿形误差ff、基节误差f
pb
,传动误差的影响综合反映在啮合线方向,其齿形误差和基节误差加工时控制量e(t)由轮齿啮合对数εr,齿轮误差的幅值er,齿轮的转速n,齿轮的齿数 z,齿轮的运行时间t决定,其经验公式为:控制齿形误差ff和基节误差f
pb
能够控制齿与齿之间的碰撞与冲击,降低振动和噪音。
63.三、通过特殊的制造修形优化避免轮齿啮入啮出冲击
64.参照图4和图5,输入齿轮、行星齿轮、花键轴齿轮的齿形中线弧高向齿轮实体外偏离为“正”如图示,反之为“负”,这个时候定义为齿形中凹,加工时需要保证轮齿实际齿形在齿形的中心上下均匀的偏离,不能允许齿形中心局部齿形中凹量超过齿形误差ff规定值以上,中凹区域不能超过0.25倍的(ebp-sbp),不能允许齿形中凹区域出现在齿轮根部。控制齿形中凹能够保证齿轮啮合时齿与齿的受力均衡,提高齿部的啮合刚度,减少齿与齿的冲击,从而降低噪音。
65.进一步,参照图4和图6,输入齿轮、行星齿轮、花键轴齿轮,加工需要保证齿轮的实际齿向线在齿向中心上下均匀的偏离,不能允许齿向中线局部齿向线中凹超过齿向误差f
fβ
规定值以上。控制齿向中凹能够保证齿轮啮合时齿与齿的受力均衡,提高齿部的啮合刚度,减少齿轮啮入啮出的冲击,从而降低噪音。
66.参照图7和图8,输入齿轮、行星齿轮、花键轴齿轮齿向要求修鼓形,鼓形量c
β
,c
β
加工时的工艺控制量和齿向螺旋角误差f
hβ
和弹性变形的螺旋角偏差 f
sh
相关,其经验公式为:c
β
=0.5(f
hβ
+f
sh
),齿向修鼓形能够保证在承载时齿轮啮合时齿部的啮合刚度,减少齿轮啮入啮出的冲击,从而降低噪音。
67.四、通过优化行星架、滚针轴承的结构,来优化传动系统输入力矩与输出力矩的变化,从而优化传动装置刚度激励产生的振动噪音。
68.参照图9,行星架的输出端输出减速器的功率,需要承受较大载荷,在行星架输出端增设凸台,能够增加输出端的刚度,使工作过程中行星架输出端的固有频率增加,而行星架的输入端承受载荷小,设置镂空结构降低行星架输入端的固有频率,工作过程中输出端带动输入端转动,输出端与输入端的刚性的差异和固有频率的差异,促使箱体不易产生振动,起到了明显的减振降噪效果。
69.参照图10,其中,附图标记23为滚子,24为聚四氟乙烯保持架,本发明将滚针轴承常规的钢保持架保组件材料优化成聚四氟乙烯材料,滚针轴承高速运转过程中聚四氟乙烯材料的将降低轴承产生的固有频率,能够促使减速器箱体不易产生振动,起到减振降噪的效果。
70.以下结合试验对本发明的设计效果进行验证。
71.图13为减速器噪音测试试验装置图。不同状态的传动装置,在相同实验条件下进
行定速定载荷试验,测试的1#麦克风置于减速器的竖向方向,距离减速器1m,另外2#麦克风至于减速器侧面,距离减速器1m,
72.试验一:在其他参数均按本发明方法设计的前提下,改变重叠系数,即改变齿轮啮合的同时配对啮合的轮齿的对数εr73.对比例:转速540r/min,重叠系数为1.1。该条件下的传动装置的实测噪声频谱图如图14和图15所示:
74.试验过程带载噪声分贝值约为61db,输入齿轮与行星轮状态,模数m大,齿数z偏小,其重叠系数小时的噪音值偏大,噪声频谱图上可以看出,噪声的频率成分多,各个频率对应的贡献值较大,试验下来噪声分别值较大。
75.本发明实施例:转速540r/min,重叠系数为2.0。该条件下的传动装置的实测噪声频谱图如图16和图17所示:
76.通过减小模数m,增加齿轮齿数z,配凑重叠系数达到2.0时的传动装置试验结果,噪声显著减小,接近53db,噪声频谱图上可以看出,噪声的频率成分大大减少了,主要的是210赫兹的一个峰值,该转频接近电机的转频,电机转速 540r/min,额定频率为36赫兹,而电机的基波频率是等于6倍基波频率,36*6=216 赫兹,行星齿轮,输入齿轮,中心齿轮、花键轴齿轮的转频几乎被完全被消除掉了,此时电机输入齿轮的转频贡献大。
77.试验二、在其他参数均按本发明方法设计的前提下,对不同齿顶修形量的减速器进行测试,测试方法完全相同,实验结果明细如下表1所示:
78.表1 中心齿轮齿顶修形的噪声测试数据
[0079][0080]
由修形数据可知,齿顶修形在0.015mm的时候为最优,低速与高速优化效果明显,可以通过合理的修形量控制来减少齿轮啮合过程中齿根到齿顶的刚度的变化,从而减少振动和噪音,修形大了,修形少了都会对噪音测试结果造成影响。
[0081]
试验三、在其他参数均按本发明方法设计的前提下,对不同齿根修形量的减速器进行测试,测试方法完全相同,其实验结果明细如下表2所示:
[0082]
表2 输入齿轮齿根修形减速器的噪声测试数据
[0083][0084]
由修形数据可知,齿根修形在-0.005mm的时候为最优,低速阶段有改善,高速阶段改善不明显。其刚好能补偿掉弹性变形导致的误差,从而减少振动和噪音,修形大了,修形少了都会放大噪声结果。
[0085]
综上所述,传动装置振动噪声产生机理主要是齿轮啮合刚度的时变性、齿轮传递误差、啮入啮出冲击以及传动系统输入力矩和负载力矩的变化均会产生动态啮合力。本发明通过优化齿轮啮合刚度的时变性问题、优化齿轮传递误差的激励、优化避免轮齿啮入啮出冲击、优化行星架、滚针轴承的结构来优化并降低减速器的振动噪声,优化效果明显,起到了明显的减振降噪效果。
[0086]
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1