一种应用于油气管道的智能清理系统的制作方法
本发明属于油气管道维修抢修的,尤其是一种应用于油气管道的智能清理系统。
背景技术:
1、日常工作的油气管道开孔封堵施工中,无法直观观察到开孔作业后的油气管道管内状况,施工人员往往仅凭经验判定开孔作业结果,这将导致施工故障排除的准确性以及故障排除过程中作业人员与设备的安全;对于油气管道中的异物有铁磁性金属异物、非铁磁性金属异物,包括开孔作业过程产生的铁屑以及落入管线的中心钻、鞍形板结合体或单体鞍形板等,则利用专用装置进行打捞。
2、现有的打捞装置中,针对开孔异物打捞装置多为关节与强磁铁组成,依赖于管外精细装配,取屑装置工作时完全依靠导向轮控制行进方向进行铁屑吸取,对实际铁屑分布范围以及吸取状态无法可视化,无法做到精确取屑;同时开孔作业时如果中心钻、鞍形板结合体或者单体鞍形板掉入管线时,针对探测打捞装置,该装置具有磁铁和连杆机构组成的多连杆机构,打捞范围受限于连杆转动臂的长度与角度预调节;且打捞作业过程分为探测与打捞两项程序,需要开关两次阀门,针对探测和打捞装置进行两次拆装,工作效率低,存在安全隐患。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供了一种应用于油气管道无死角可视化的智能清理系统,以解决传统封堵工艺过程中仅凭是否泄漏进行验证、评定封堵效果的粗线条工艺流程,有效提高封堵作业质量和安全性。
2、本发明解决其技术问题是采取以下技术方案实现的:
3、一方面本发明提供了一种应用于油气管道的智能清理装置,包括管外控制装置、容纳装置、清理机器人和开孔组件,所述管外控制装置通过所述电缆和所述容纳装置的配合与所述清理机器人连接,所述容纳装置和清理机器人可通过开孔组件设置在油气管道内部,所述清理机器人用于实现在油气管道内部完成的指定的作业,所述管外控制装置通过容纳装置实现对清理机器人的远程控制,
4、所述容纳装置包括容纳装置上仓和容纳装置下仓,所述容纳装置上仓和容纳装置下仓均为半开放方式结构,所述容纳装置上仓用于电缆的集成控制,所述容纳装置下仓用于容纳所述清理机器人,
5、所述容纳装置上仓包括容纳装置上仓支架、收线器组件、集电环和接线盒,所述收线器组件包括收线器上支撑架、收线器下支撑架、收线器电机、收线滚轮和收线器固定板,所述收线器上支撑架的顶端与所述容纳装置上仓支架的内壁固定连接,所述收线器上支撑架的底端和收线器下支撑架的顶端与所述收线滚轮轴连接,所述收线器下支撑架的底端设置所述线器固定板,所述收线器上支撑架和收线器下支撑架的连接处分别设置所述收线器电机和所述集电环,所述收线滚轮与所述容纳装置上仓支架的内壁之间设置所述接线盒,所述接线盒用于将所述电缆划分为控制电缆和驱动电缆且分别导入至所述收线器电机和所述集电环,导出后所述控制电缆和驱动电缆的缠绕在所述收线滚轮上后分别与所述清理机器人连接,所述控制电缆和驱动电缆用于实现对所述清理机器人的电力驱动和信号传输,
6、所述容纳装置上仓支架的顶端设置有容纳装置连接件,所述容纳装置连接件与所述开孔组件可拆卸连接,所述容纳装置上仓支架顶端的一侧设置有容纳装置电缆接线器,
7、所述容纳装置下仓为圆筒状,所述容纳装置下仓顶端的外壁与所述收线器下支撑架底端的内壁固定连接,所述容纳装置下仓的中下部依照油气管道介质流动方向相对开设有容纳装置下仓孔,所述容纳装置下仓孔用于将所述清理机器人放置在所述容纳装置下仓的内部,所述容纳装置下仓底端内壁上开设有y型槽,所述y型槽用于放置所述清理机器人打捞的管内异物;
8、优选地,所述清理机器人包括控制模块、驱动模块、采集模块和操作模块,所述控制模块分别与所述驱动模块、采集模块和操作模块连接,所述控制模块还通过所述电缆和所述容纳装置的配合与所述管外控制装置连接,
9、所述驱动模块包括驱动电机和强磁履带,所述驱动电机在所述控制模块的操控下驱动所述强磁履带进行行走,
10、所述采集模块包括摄像探头,所述摄像探头用于对油气管道内部封堵作业区实现360度观测,实时监测所述清理机器人行走的姿态和工作情况,
11、所述操作模块包括机械手臂、旋转装置和操作工装组件,所述机械手臂在所述控制模块的操控下实现四轴转动操作,所述机械手臂安装在所述旋转装置上,所述旋转装置用于带动所述机械手臂的水平转动,所述机械手臂用于针对油气管道内部不用的异物的工况选择不同的操作工装组件;
12、优选地,所述旋转装置包括旋转电机和回转轴承,所述旋转电机在所述控制模块的操控下驱动所述回转轴承转动,所述机械手臂安装在所述回转轴承上,在所述旋转电机和回转轴承的配合下,实现对所述所述机械手臂的水平转动,
13、所述操作工装组件包括倒钩、电磁铁、齿轮柱和工装桶,所述倒钩、电磁铁和齿轮柱设置在所述工装桶的内部,所述倒钩、电磁铁和齿轮柱均配有钢丝绳,所述齿轮柱配有啮合连接的齿轮,所述倒钩、电磁铁和齿轮柱通过所述机械手臂的夹取完成对油气管道内部不同异物的清理;
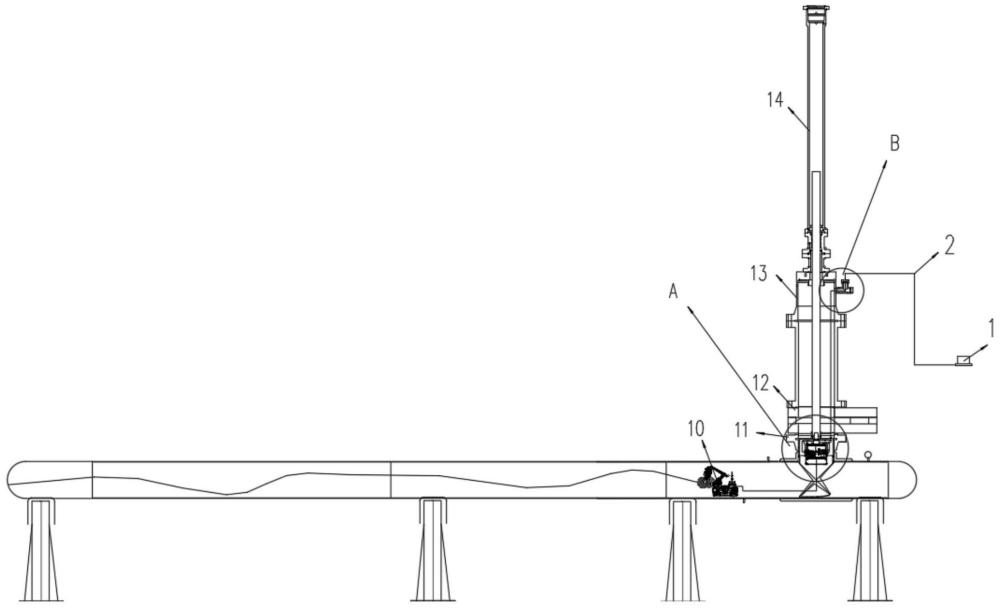
14、优选地,所述开孔组件包括管线三通、阀门、送进结合器和开孔机,所述开孔机的底端与所述送进结合器的顶端可拆卸连接且连通,所述送进结合器的底端与所述阀门的顶端可拆卸连接且连通,所述阀门通过所述管线三通与油气管道连通,
15、所述送进结合器靠近所述开孔机处的外壁上设置有送进结合器连接件,所述送进结合器连接件上设置有密封盖板,所述密封盖板上设置有送进结合器电缆接线器,所述送进结合器电缆接线器和纳装置电缆接线器的配合用于实现管外与管内的所述电缆连通;
16、另一方面本发明还提供了一种应用于油气管道的智能清理装置的方法,具体步骤如下:
17、步骤1、将所述清理机器人安装在所述容纳装置下仓,通过将所述收线滚轮导出的控制电缆和驱动电缆分别与所述清理机器人连接,利用所述开孔机的主轴与所述容纳装置通过所述容纳装置连接件连接,同时将所述送进结合器电缆接线器和纳装置电缆接线器之间的所述电缆连通实现管内线路连通;
18、步骤2、在所述开孔机主轴的控制下将安装后的所述容纳装置通过所述阀门和所述管线三通送至油气管道内部,然后将所述电缆分别与所述送进结合器电缆接线器和所述管外控制装置连接完成管外线路连通,关闭所述阀门完成管内外介质的阻隔;
19、步骤3、利用所述管外控制装置远程控制所述清理机器人在油气管道内完成的指定的作业,具体为:
20、利用所述摄像探头采集油气管道内的异物的位置与状况,并传输至所述管外控制装置,
21、当油气管道内存在中心钻与鞍形板结合体的情况,在所述控制模块的控制下,所述机械手臂夹取齿轮柱套住钻头,所述清理机器人后退时,所述齿轮柱上的钢丝绳拉起,通过齿轮柱啮合连接的所述齿轮卡紧钻头,带着中心钻与鞍形板结合体缓慢退出管道;
22、当油气管道内存在只有鞍形板的情况,在所述控制模块的控制下,所述机械手臂调整鞍形板的状态,然后夹取所述倒钩伸入鞍形板的中心孔,机器人后退时,所述倒钩勾住鞍形板缓慢退出管道;
23、当油气管道内存在有铁屑的情况,在所述控制模块的控制下,所述机械手臂夹取所述电磁铁通电前靠近铁屑,通电后,所述电磁铁吸取铁屑,在摄像头辅助观察下实现铁屑清理工作;
24、当油气管道内存在有内堵漏的情况,在所述控制模块的控制下,所述机械手臂夹持内堵漏密封销,完成油气管道内靠近所述阀门端15米范围内的内堵漏。
25、本发明的优点和积极效果是:
26、本发明提出了一种应用于油气管道的智能清理系统,相对于现有技术中针对维抢修作业现阶段的技术需求以及现有探测打捞装置存在可视化判定程度低、作业精度低、安全可靠性差的问题,通过利用原有的所述开孔组件将所述清理机器人介入到油气管道内部,清理机器人能够针对在油气管道开孔封堵作业区域管内的各工艺状态进行可视化信息采集,为管外作业人员提供可视化信息并做出准确的分析和判定;可实现近阀门端(0-15m范围)管内内堵漏和打捞功能;可灵活可靠的实现管道内铁屑吸取和脱落在管内鞍形板与中心钻后的抓取,确保管道开孔封堵作业的安全性和可靠性,彻底解决传统封堵工艺过程中仅凭最终是否泄漏进行验证、评定封堵效果的粗线条工艺流程,有效提高封堵作业质量和安全性。
- 还没有人留言评论。精彩留言会获得点赞!