一种应用于真空机械手立柱的升降轴装置的制作方法
1.本发明属于真空机械手技术领域,具体地说是一种应用于真空机械手立柱的升降轴装置。
背景技术:
2.随着半导体行业的快速发展,真空机械手已广泛应用于行业内硅片搬运场景中,且多种工况下的使用条件给真空机械手立柱提出诸多要求,其中之一就是空间布局问题,在生产车间内空间有限的条件下,最大限度提高工作效率,提高空间利用率是一重大难题。常规的真空机械手立柱内部的升降结构多采用伺服电机或步进电机驱动机械手主驱动部件进行升降,此结构占用空间大问题尤为突出,使真空机械手的立柱缩短成为亟待解决的难题。
技术实现要素:
3.针对上述问题,本发明的目的在于提供一种应用于真空机械手立柱的升降轴装置。
4.本发明的目的是通过以下技术方案来实现的:
5.一种应用于真空机械手立柱的升降轴装置,包括立柱上法兰及机械手主驱动部件,所述立柱上法兰与机械手主驱动部件之间通过波纹管连接,还包括动力输出组件及动力传动组件,所述动力输出组件及动力传动组件分别安装于立柱上法兰上,所述波纹管穿过所述动力输出组件,所述动力传动组件分别与所述动力输出组件及机械手主驱动部件连接,所述动力输出组件通过驱动所述动力传动组件动作、进而带动所述机械手主驱动部件升降。
6.所述动力传动组件包括丝杠安装座、传动机构、丝杠及与所述丝杠螺纹连接的丝杠螺母,所述丝杠安装座安装于所述立柱上法兰上,所述丝杠转动安装于所述丝杠安装座上,所述丝杠螺母与机械手主驱动部件连接,所述动力输出组件通过传动机构驱动所述丝杠转动、进而带动与所述丝杠螺母连接的机械手主驱动部件升降。
7.所述丝杠上连接有制动器。
8.所述传动机构包括主动带轮、从动带轮及同步带,所述丝杠上安装有从动带轮,所述从动带轮通过同步带与主动带轮连接,所述主动带轮用于与所述动力输出组件的输出端相连。
9.所述主动带轮上安装有码盘,所述动力输出组件上安装有与所述码盘配合使用的读数头。
10.所述主动带轮上通过螺钉安装有用于将所述码盘压在所述主动带轮端面表面上的码盘盖板。
11.所述动力输出组件上安装有若干个用于涨紧所述同步带的涨紧轮。
12.所述动力输出组件包括电机上壳、电机下壳、力矩电机、电机中心轴及电机下轴,
所述电机上壳安装于所述立柱上法兰上,所述电机上壳与电机下壳连接成力矩电机外安装壳整体,所述力矩电机装设于所述力矩电机外安装壳整体内部,所述力矩电机的电机转子与所述电机中心轴连接,所述电机中心轴与所述电机下轴连接,所述波纹管分别穿过所述电机中心轴、所述电机下轴,所述电机下轴作为动力输出组件的输出端与动力传动组件连接。
13.所述电机转子的轴向中心线、所述电机中心轴的轴向中心线及所述电机下轴的轴向中心线均共线。
14.所述力矩电机的电机定子装设于所述电机上壳中,所述电机上壳中通过螺钉安装有用于定位压住所述电机定子的定子压块。
15.本发明的优点与积极效果为:
16.本发明通过将动力输出组件及动力传动组件安装于立柱上法兰底面上,可充分利用现有技术中的立柱上半部波纹管外侧的环形空闲区域,采用全新的动力输出结构,合理利用立柱内部有效空间,在总升降行程不变的情况下,可大幅度将立柱高度缩短。
附图说明
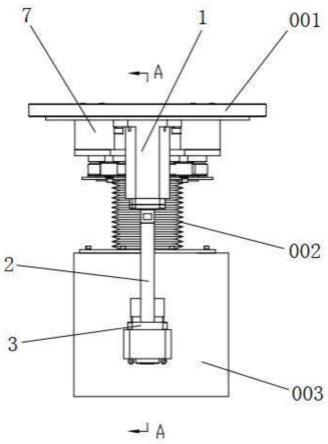
17.图1为本发明的整体设置结构示意图;
18.图2为图1的a-a剖面结构示意图;
19.图3为本发明的动力传动组件结构示意图;
20.图4为图3的b-b剖面结构示意图;
21.图5为本发明的动力输出组件的仰视结构示意图;
22.图6为图5的c-c剖面结构示意图。
23.图中:1为丝杠安装座、2为丝杠、3为丝杠螺母、4为制动器、5为从动带轮、6为同步带、7为电机上壳、8为电机下壳、9为电机中心轴、10为电机下轴、11为主动带轮、12为电机转子、13为电机定子、14为定子压块、15为涨紧轮、16为码盘、17为码盘盖板、18为薄壁轴承a、19为薄壁轴承b、001为立柱上法兰、002为波纹管、003为机械手主驱动部件。
具体实施方式
24.下面结合附图1-6对本发明作进一步详述。
25.一种应用于真空机械手立柱的升降轴装置,如图1和图2所示,本实施例中包括立柱上法兰001及机械手主驱动部件003,立柱上法兰001与机械手主驱动部件003之间通过波纹管002连接;还包括动力输出组件及动力传动组件。动力输出组件及动力传动组件分别安装于立柱上法兰001上,波纹管002穿过动力输出组件,动力传动组件分别与动力输出组件及机械手主驱动部件003连接,动力输出组件通过驱动动力传动组件动作、进而带动机械手主驱动部件003升降。
26.具体而言,如图3和图4所示,本实施例中动力传动组件包括丝杠安装座1、传动机构、丝杠2及与丝杠2螺纹连接的丝杠螺母3,丝杠安装座1安装于立柱上法兰001的底面上,丝杠2转动安装于丝杠安装座1上,丝杠螺母3与机械手主驱动部件003连接,动力输出组件通过传动机构驱动丝杠2转动、进而带动与丝杠螺母3连接的机械手主驱动部件003升降。丝杠2上连接有制动器4;丝杠2采用市购的滚珠丝杠;制动器4为市购产品,与外接控制器连
接,可以在断电等突发情况下实现丝杠2锁定,即保持丝杠2停止旋转,达到升降轴急停的状态,起到保护作用。传动机构包括主动带轮11、从动带轮5及同步带6,丝杠2上安装有从动带轮5,从动带轮5通过同步带6与主动带轮11连接,主动带轮11用于与动力输出组件的输出端相连。
27.具体而言,如图5和图6所示,本实施例中动力输出组件包括电机上壳7、电机下壳8、力矩电机、电机中心轴9及电机下轴10,电机上壳7安装于立柱上法兰001的底面上,电机上壳7与电机下壳8通过螺钉连接成力矩电机外安装壳整体,力矩电机装设于力矩电机外安装壳整体内部,力矩电机的电机转子12与电机中心轴9连接,电机中心轴9与电机下轴10连接,电机下轴10与主动带轮11连接,波纹管002分别穿过电机中心轴9、电机下轴10及主动带轮11。本实施例中电机转子12的轴向中心线、电机中心轴9的轴向中心线、电机下轴10的轴向中心线及主动带轮11的轴向中心线均共线。力矩电机的电机定子13装设于电机上壳7中,电机上壳7中通过螺钉安装有用于定位压住电机定子13的定子压块14,便于将力矩电机的电机定子13稳定安装与电机上壳7中。电机下壳8上安装有两个用于涨紧同步带6的涨紧轮15。本实施例中力矩电机为市购产品,由外接控制器控制动作。
28.具体而言,本实施例中主动带轮11上安装有码盘16,电机下壳8上安装有与码盘16配合使用的读数头。主动带轮11上通过螺钉安装有用于将码盘16压在主动带轮11端面表面上的码盘盖板17。码盘16及读数头均为市购产品,读数头与外接控制器连接;码盘16及读数头的配合设置,用于记录主动带轮11的旋转坐标,结合外接的度数装置即电气装置给出数值反馈,实现对旋转运动的精确控制。
29.本实施例中电机上壳7、电机下壳8、电机中心轴9、力矩电机、定子压块14共同装配成动力输出组件,将薄壁轴承a18优先装入电机上壳7,定子压块14将电机定子13压装到电机上壳7中;电机转子12和电机下轴10依次装在电机中心轴9上后,整体装入电机上壳7,薄壁轴承b19套进电机下轴10,电机下壳8压紧薄壁轴承b19并与电机上壳7通过螺钉固定,主动带轮11装在电机下轴10下端,涨紧轮15及读数头分别装在电机下壳8上,码盘16、码盘盖板17依次安装在主动带轮11上。丝杠2固定到丝杠安装座1上,从动带轮5通过紧定螺钉固定到丝杠2端部,同步带16套入从动带轮5,制动器4与丝杠2的端部连接并固定到丝杠安装座1上。薄壁轴承a18及薄壁轴承b19均为市购产品,薄壁轴承a18及薄壁轴承b19的配合设置可使电机中心轴9、电机下轴10及主动带轮11连接的整体稳定转动。丝杠安装座1及电机上壳7分别固定于立柱上法兰001的底面上,且同步带16再穿过主动带轮11及各涨紧轮15,丝杠螺母3与机械手主驱动部件003连接。
30.工作原理:
31.使力矩电机通电,电机转子12开始旋转,通过主动带轮11、同步带6及从动带轮5将动力传动至丝杠2一侧,丝杠2通过自转带动丝杠螺母3升降,进而实现机械手主驱动部件003上下往复升降的功能;制动器4的设置,可以在断电等突发情况下实现丝杠2锁定,即保持丝杠2停止旋转,达到升降轴急停的状态,起到保护作用;码盘16及读数头的配合设置,用于记录主动带轮11的旋转坐标,结合外接的度数装置即电气装置给出数值反馈,实现对旋转运动的精确控制;通过将动力输出组件及动力传动组件安装于立柱上法兰底面上,可利用现有技术中的立柱上半部波纹管003外侧的环形空闲区域,采用全新的动力输出结构,合理利用立柱内部有效空间,在总升降行程不变的情况下,可大幅度将立柱高度缩短。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1