一种剪叉式升降云台摄像系统的制作方法
1.本发明涉及监控设备技术领域,具体涉及一种剪叉式升降云台摄像系统。
背景技术:
2.目前市面上轨道式巡检机器人普遍采用普通的云台摄像仪,此类云台摄像仪在机器人巡检过程中只能读取或捕捉轨道附近的仪器仪表数据,距离轨道较远的仪器仪表数据云台摄像仪则读取不上或捕捉不到,大大降低了云台摄像仪在巡检时的可靠性。
3.由此可见,如何提高云台摄像仪巡检时的可靠性为本领域需解决的问题。
技术实现要素:
4.针对于现有云台摄像仪存在可靠性不高的技术问题,本发明的目的在于提供一种剪叉式升降云台摄像系统,其能够提高巡检机器人的巡检范围,大大提高了云台摄像仪在巡检时的可靠性,很好地克服了现有技术所存在的问题。
5.为了达到上述目的,本发明提供的一种剪叉式升降云台摄像系统,包括控制系统,剪叉式升降机构和云台摄像仪;所述控制系统驱动连接剪叉式升降机构;所述剪叉式升降机构设置于云台摄像仪顶部并驱动连接云台摄像仪。
6.进一步地,所述剪叉式升降机构包括电机驱动单元以及升降单元;所述电机驱动单元驱动连接升降单元。
7.进一步地,所述升降单元包括固定支架,云台安装板以及升降组件;所述升降组件的两端分别与固定支架连接。
8.进一步地,所述固定支架包括上固定支架与下固定支架;所述上固定支架与电机驱动单元连接;所述下固定支架通过设置云台安装板与云台摄像仪进行连接;所述上固定支架与下固定支架之间形成安置空间。
9.进一步地,所述升降组件包括两组剪叉式组件,所述两组剪叉式组件对称设置并且两端通过设置连接转轴分别与上固定支架和下固定支架进行铰接,可相对于上固定支架和下固定之间进行转动;所述两组剪叉式组件的组成结构相同,分别是由若干的交叉组件通过销钉依次连接构成剪式结构。
10.进一步地,所述交叉组件是由两个连杆交叉设置而成,相交之处采用连杆连接轴进行连接,两个连杆之间可通过连杆连接轴相互转动。
11.进一步地,所述电机驱动单元包括驱动组件以及传动组件;所述驱动组件驱动连接传动组件。
12.进一步地,所述驱动组件包括驱动电机以及驱动安装板;所述驱动电机设置于驱动安装板上,
13.进一步地,所述传动组件包括滚筒,滚筒支座,导向轮组以及钢丝绳;所述滚筒与滚筒支座配合连接后,通过滚筒支座固定于驱动安装板上;
14.所述滚筒通过设置连轴器与驱动电机连接;所述导向轮组固定于驱动安装板底
部;所述钢丝绳一端缠绕于滚筒上,另一端通过导向轮组与云台安装板进行驱动连接。
15.进一步地,所述升降组件外围设有防护罩;所述防护罩两端面分别与驱动安装板和云台安装板进行连接。
16.本发明提供的剪叉式升降云台摄像系统,其通过在云台摄像仪顶部设置一个剪叉式升降台,控制系统可根据现场环境下来控制升降台升降的高度,极大的提高了轨道式巡检机器人的巡检范围,提高了云台摄像仪在巡检时的可靠性。
附图说明
17.以下结合附图和具体实施方式来进一步说明本发明。
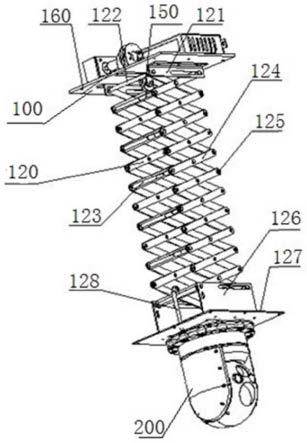
18.图1为本剪叉式升降云台摄像仪的内部结构示意图;
19.图2为本剪叉式升降云台摄像仪的外观整体结构示意图;
20.图3为本剪叉式升降云台摄像仪中传动组件的结构示意图。
21.下面为附图中的部件标注说明:
22.100.剪叉式升降机构200.云台摄像仪300.防护风琴罩
23.110.电机驱动单元120.升降单元
24.110.滚筒120.连轴器130.滚筒支座140.驱动电机150.导向轮组160.驱动安装板170.钢丝绳
25.121.上固定支架122.连接转轴123.连杆连接轴124.连杆125.销钉126.下固定支架127.云台安装板128.拉杆。
具体实施方式
26.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体图示,进一步阐述本发明。
27.针对于现有云台摄像仪存在可靠性不高的技术问题,基于此技术问题,本方案提供了一种剪叉式升降云台摄像系统,其通过在云台摄像仪顶部设置一个剪叉式升降台,控制系统可根据现场环境下来控制升降台升降的高度,极大的提高了轨道式巡检机器人的巡检范围,提高了云台摄像仪在巡检时的可靠性。
28.参见图1-图2,本方案提供的剪叉式升降云台摄像仪,其包括控制系统,剪叉式升降机构100和云台摄像仪200;剪叉式升降机构100与云台摄像仪200配合,能够对云台摄像仪200进行高度的调整。
29.控制系统驱动连接剪叉式升降机构100,控制系统可根据现场环境下来控制升降台升降的高度。
30.进一步地,剪叉式升降机构100包括电机驱动单元110以及升降单元120。
31.其中,升降单元120用于对云台摄像仪200进行升降,其包括固定支架,云台安装板1272以及升降组件。
32.进一步地,参见图1,固定支架包括上固定支架121和下固定支架122。
33.其中,上固定支架121与上部的电机驱动单元110连接,其为升降单元120与电机驱动单元110之间的连接件,同时,还为电机驱动单元110的安装体和支撑体;下固定支架122与云台安装板127进行连接,上固定支架121与下固定支架122之间形成一定的安置空间,用
于安装升降组件。
34.云台安装板127与底部的云台摄像仪200进行连接,其为升降单元120与云台摄像仪200之间的连接件,同时,还为云台摄像仪200的安装体;云台摄像仪200可随着云台安装板127的升降而升降。
35.拉杆128通过螺栓组件安装于云台安装板127上,其一端与电机驱动单元110连接,可通过拉杆128可将电机驱动单元110的动力传输至云台安装板127上,带动云台安装板127驱动云台摄像仪200进行上下移动。
36.升降组件包括两组剪叉式组件,两组剪叉式组件对称设置并且两端通过连接转轴122分别与上固定支架121和下固定支架122进行铰接,可相对于上固定支架121和下固定支架122进行转动。
37.两组剪叉式组件的组成结构相同,分别是由若干的交叉组件以及若干的销钉125构成。
38.其中,每个交叉组件是由两个连杆124交叉设置而成,相交之处采用连杆连接轴123进行连接,两个连杆124之间可相互进行转动。
39.将由两个连杆124交叉设置构成的若干交叉组件之间通过销钉125连接,即可构成本方案中的剪式结构;由于剪式结构的连接处均采用铰接结构。
40.因此,其可朝着伸展方向进行伸缩。当云台摄像仪200进行上下移动时,剪叉式升降组件相对的进行伸缩。
41.电机驱动单元110驱动连接升降单元120,其设置于上固定支架121的上部,其用于驱动升降单元120的上下移动。
42.电机驱动单元110包括驱动组件以及传动组件。
43.其中,驱动组件驱动连接传动组件,用于为传动组件提供驱动力。驱动组件包括驱动电机140以及驱动安装板160;驱动电机140通过螺栓组件固定于驱动安装板160上,
44.参见图2-图3,传动组件包括滚筒110,滚筒支座130,导向轮组150以及钢丝绳170。
45.其中,滚筒110与滚筒支座130配合连接后,通过滚筒支座130固定于驱动安装板160上。
46.滚筒110通过连轴器120与驱动电机140连接,通过驱动电机140的正反转动可驱动滚筒110进行正反的滚动。
47.导向轮组150固定于驱动安装板160底部,用于为驱动组件提供的驱动力进行导向。
48.钢丝绳170一端缠绕于滚筒110上,另一端通过导向轮组150与设置于云台安装板上的拉杆128进行连接。
49.滚筒110根据驱动电机140的正反转动进行正反的滚筒110,可对设置于滚筒110上的钢丝170绳进行伸张和收缩,因此,可对钢丝绳170另一端的云台安装127板进行上下的移动,从而带动云台摄像仪200进行升降。
50.另外,参见图1,在升降组件的外围设置有防护风琴罩300,其两端面分别通过螺栓组件与驱动安装板160和云台安装板127进行连接,对内部的升降组件进行安全防护。
51.以下举例说明一下本方案在使用时的工作过程;这里需要说明下述内容只是本方案的一种具体应用示例,并不对本方案构成限定。
52.当云台摄像仪200需向上移动时,此时,控制系统控制驱动电机140为正向运动,带动滚筒110进行正向滚动,对设置于滚筒110上的钢丝绳170进行收缩,钢丝绳170的收缩带动云台安装板127进行向上移动,从而云台摄像仪200跟随向上移动,同时,移动的过程中,剪叉式升降组件相对的进行收缩。
53.相反的,当云台摄像仪200需向下移动时,此时,控制系统控制驱动电机140为反向运动,带动滚筒110进行反向滚动,对设置于滚筒110上的钢丝绳170进行伸张,钢丝绳170的伸张带动云台安装板127进行向下移动,从而云台摄像仪200跟随向下移动,同时,移动的过程中,剪叉式升降组件相对的进行扩张。
54.由上述方案构成的剪叉式升降云台摄像系统,其通过在云台摄像仪顶部设置一个剪叉式升降台,控制系统可根据现场环境下来控制升降台升降的高度,极大的提高了轨道式巡检机器人的巡检范围,扩大了轨道式巡检机器人的使用范畴,大大提高了云台摄像仪在巡检时的可靠性。
55.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1