一种水平360度声控定位转向系统及其控制方法与流程
本发明涉及一种智能语音设备机械控制系统,具体地,涉及一种水平360度声控定位转向系统及其控制方法。
背景技术:
0、技术背景
1、随着科学技术的快速发展,智能家居的相关技术也不断成长完善,智能家居语音控制技术可实现随时随地的自由控制、管理家中所有的家用电器。同时,语音控制技术的发展为物联网的快速发展奠定基础。由智能家居、智能园区、电动汽车充换电设施建设等部分构成的智能电网,在未来的发展中将对智能语音控制系统提出更高更全面的要求。因此,语音控制不仅仅要实现语音识别,还要实现方位判断。声源方位识别配合机械控制系统实现声控定位转向系统,在机器人和智能控制方面都具有重要的意义。
技术实现思路
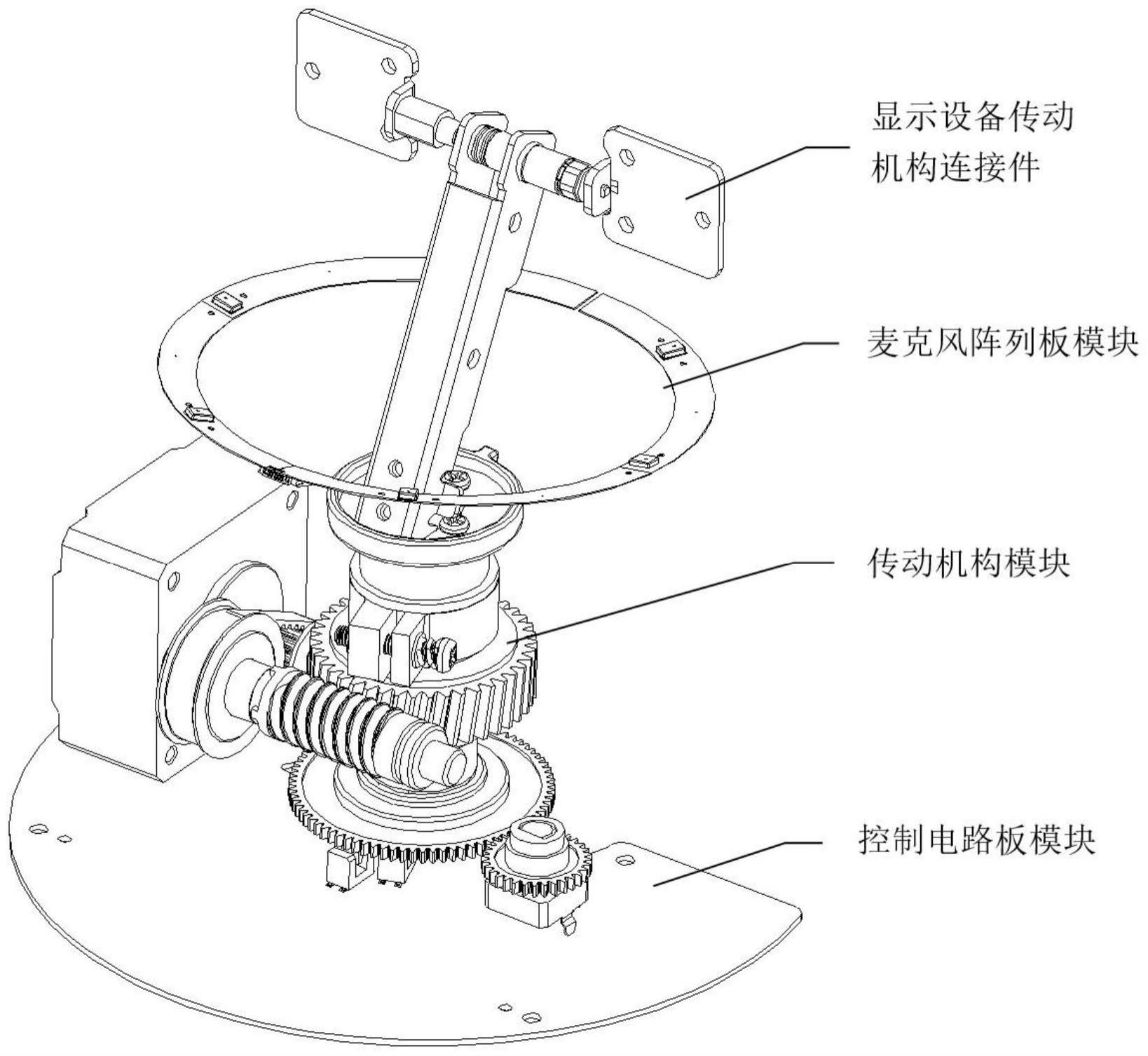
1、本发明提供了一种低成本、可靠的转向解决方案,实现了音视频产品通过对声音定位来引导设备正确转向的产品需求。具体地,本发明提供了一种水平360度声控定位转向系统,包括:
2、显示设备传动机构连接件,传动机构连接件的下端通过螺丝与传动机构模块的中轴连接,上端用于固定支撑显示设备;
3、麦克风阵列板模块,包括麦克风器件单体、数据传输线,其中麦克风器件单体用于接收声源,数据传输线传输指令到控制芯片,通过逻辑算法判断声音来源方向;
4、传动机构模块,包括步进电机、驱动同步轮、从动同步轮、同步带、带自锁功能的蜗杆、带预紧轴承的蜗轮、中轴、带遮挡片的直齿轮、编码器直齿轮和预紧轴承,与显示设备传动机构连接件相连,用于带动显示设备传动机构连接件水平旋转;
5、控制电路板模块,包括光斩波器、ec11增量型编码器、控制芯片,用于判断显示设备的当前位置和转动方向。
6、其中,所述麦克风阵列板模块为环形结构,包括6个数字麦克风器件单体,按照60度等角度环形排布。
7、优选地,所述蜗杆具有自锁功能。
8、优选地,所述带遮挡片的直齿轮与中轴相连,带遮挡片的直齿轮上包含有4个遮挡片,与所述控制电路板模块上的两个光斩波器配合进行位置和转动角度判断。
9、优选地,所述编码器直齿轮安装在控制电路模块的ec11增量型编码器上,与带遮挡片的直齿轮啮合,设定减速比为40∶16。
10、优选地,所述ec11增量型编码器的输出信号方式是2个定位1个脉冲,回转360°输出15个脉冲、30个定位,每个定位的角度范围是12°。
11、优选地,所述中轴和编码器直齿轮的最小定位角度为4.8°。
12、相应地,本发明提供了一种水平360度声控定位转向系统的控制方法,包括:
13、a.整机上电系统初始化后,显示设备旋转至系统默认的居中状态,ec11增量型编码器归零;
14、b.在整机工作期间传动机构模块不论是经过自动模式还是手动模式旋转,显示设备的当前位置均由ec11增量型编码器记录下来,数据反馈给控制芯片;
15、c.当声音定位功能启动后,麦克风器件单体接收到声源,通过逻辑算法判断声音来源方向,然后经数据传输线传输指令到控制芯片;
16、d.无论当前显示设备位于任何角度,均可由控制芯片计算并发出正确脉冲给步进电机,来驱动传动机构模块带动显示设备转到正确方向。
17、其中,所述步骤b中自动模式的工作方式为步进电机通过驱动同步轮-同步带-从动同步轮-蜗杆-蜗轮的设定减速比,带动中轴沿轴向做旋转运动,从而带动显示设备传动机构连接件一起旋转。
18、其中,所述步骤b中手动模式的工作方式为施加在显示设备的外力扭矩小于蜗轮上的预紧轴承的预紧力时,受蜗杆的自锁功能影响,显示设备不会旋转;外力扭矩大于蜗轮上的预紧轴承的预紧力时,预紧轴承与中轴发生相对滑动,显示设备旋转。
19、根据本发明提供的一种水平360度声控定位转向系统及其控制方法,实现准确定位声源位置方向和设备的初始位置判定及精确转向。
技术特征:
1.一种水平360度声控定位转向系统,包括:
2.根据权利要求1所述的水平360度声控定位转向系统,其特征在于,所述麦克风阵列板模块为环形结构,包括6个数字麦克风器件单体,按照60度等角度环形排布。
3.根据权利要求1所述的水平360度声控定位转向系统,其特征在于,所述蜗杆具有自锁功能。
4.根据权利要求1所述的水平360度声控定位转向系统,其特征在于,所述带遮挡片的直齿轮与中轴相连,带遮挡片的直齿轮上包含有4个遮挡片,与所述控制电路板模块上的两个光斩波器配合进行位置和转动角度判断。
5.根据权利要求1所述的水平360度声控定位转向系统,其特征在于,所述编码器直齿轮安装在控制电路模块的ec11增量型编码器上,与带遮挡片的直齿轮啮合,设定减速比为40∶16。
6.根据权利要求1所述的水平360度声控定位转向系统,其特征在于,所述ec11增量型编码器的输出信号方式是2个定位1个脉冲,回转360°输出15个脉冲、30个定位,每个定位的角度范围是12°。
7.根据权利要求5所述的水平360度声控定位转向系统,其特征在于,所述中轴和编码器直齿轮的最小定位角度为4.8°。
8.一种水平360度声控定位转向系统的控制方法,包括:
9.根据权利要求8所述的水平360度声控定位转向系统的控制方法,其特征在于,所述步骤b中自动模式的工作方式为步进电机通过驱动同步轮-同步带-从动同步轮-蜗杆-蜗轮的设定减速比,带动中轴沿轴向做旋转运动,从而带动显示设备传动机构连接件一起旋转。
10.根据权利要求8所述的水平360度声控定位转向系统的控制方法,其特征在于,所述步骤b中手动模式的工作方式为施加在显示设备的外力扭矩小于蜗轮上的预紧轴承的预紧力时,受蜗杆的自锁功能影响,显示设备不会旋转;外力扭矩大于蜗轮上的预紧轴承的预紧力时,预紧轴承与中轴发生相对滑动,显示设备旋转。
技术总结
本发明提供了一种水平360度声控定位转向系统及控制方法,包括:显示设备传动机构连接件,麦克风阵列板模块,传动机构模块和控制电路板模块。本发明提供了一种低成本、可靠的转向解决方案,实现了音视频产品通过对声音定位来引导设备正确转向的产品需求,实现准确定位声源位置方向和设备的初始位置判定及精确转向。
技术研发人员:刘锡林,杨玉峰,袁文辉
受保护的技术使用者:上海赛连信息科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!