一种串联交叉杠杆增长杠杆负力臂负力功距的主动力功率增大机的制作方法
1.本发明属于串联交叉杠杆增长杠杆负力臂负力功距技术领域,更具体涉及一种串联交叉杠杆增长杠杆负力臂负力功距的主动力功率增大机,可适用于为公路上行驶的车辆装配提供动力,为铁路机车装配提供动力,为船舶、为发电机装配提供动力。
背景技术:
2.迄今为止,人造的动力机有五种,烧石油系列内燃动力机、烧煤动力机、电动机、核动力机,燃油涡轮机。烧石油系列动力机和烧煤系列动力机排的废气是二氧化碳。电动机需要烧煤发电厂或昂贵的核动力发电厂供电。煤和核材料在自然界是有限的,核反应堆厚重的外壳是由稀土元素冶炼的高级不锈钢制造,很昂贵。
3.目前现有的技术装备是内燃机、电动机、蒸汽机、核能机、燃油涡轮机五种。内燃机壳体分三部分,上部分是顶盖,功能是固装凸轮和气门。中部是机躯干体,是装配气缸和挂油泵。下部分是装曲轴的底座。主功能件是油泵、凸轮、气门、气缸、活塞、连杆、曲轴。气门安装在顶盖里,凸轮安装在顶盖外上,顶盖安装在躯干体上,气门对着气缸位上,气缸装在躯干体内,活塞装进气缸里,活塞和连杆小端连接,连杆大端和曲轴的轴臂顶连杆位连接,把躯干体装在底座上,同时曲轴的轴瓦位安放在底座的轴瓦位上。主要问题是油泵向气缸里喷油燃烧,推动活塞前行,产生动力功率。但是回程时排出废气,不产生动力功率,第二次活塞前行冲程时,只是吸气,不产生动力功率,第二次回程时是压气,不产生动力功率,而且产生压气的负力,第三次冲程才向气缸里喷油燃烧,推动活塞产生动力功率,也就是说一次向气缸里喷油燃烧产生动力功率要无谓地消耗了四分之三的时间,即活塞在燃油燃烧推动下产生的动力功率要除于四;第二个问题是内燃机是烧油动力机,消耗大气层氧气,排出二氧化碳;第三个问题是不断的花钱买油,使用成本高。二、电动机是由外壳定子、内心转子、外壳定子里的铜线圈组成,有的直流电动机的外壳定子和内心转子都有铜线圈,内心转子安装在外壳定子里,主要问题是:一、一般电动机是固定使用,不能移动,因供电的电线不能移动。要电动机移动使用要两个条件,一个条件是携带价钱是电动机价钱几倍的充电电池。二个条件是在固定运行的路上架设供电电线,所以使用电动机有局限性。二个问题是电动机有很贵的铜材。三个问题是要不断地花钱买电,使用成本高。蒸汽机主要是发电厂使用的烧煤蒸汽机,它主要设备是二十米左右长,口径一米多到两米,里面有多层环槽,壁有几十厘米厚的一次性管状碾煤机,或多个里面只有一个环槽短管碾煤机,以及装在碾煤机里环槽上约一米直径的大钢球;粉煤输送带机,漏斗,吹风机,炉子,锅,管道,涡轮机组成。一次性长管碾煤机斜向安放,下端口对着粉煤输送带机,输送带机另一端对着漏斗上大口,漏斗下小口垂对着吹风机,吹风机对着炉口,炉子上方安装锅,锅里装水,锅上安装管道,管道另一端安装在涡轮机一端,煤块从碾煤机上端进入,管状碾煤机旋转,钢球在环槽上滚动碾压煤块,煤块经过多层钢球碾压,最后成煤粉从碾煤机下端口输出到输送带上,送到漏斗上大口倒进,从漏斗下小口漏出,被吹风机吹进炉子里燃烧,把锅里的水烧成水蒸气从管道里输
出,带动涡轮机的叶片旋转,带动涡轮轴再带动发电机旋转发电。主要问题有:一、时间长了锅里内壁上糊上一层碳酸钙污垢,碳酸钙污垢导热率低,减小了热交换率,水蒸气量也会减少,降低了涡轮机的动力功率;二、长管碾煤机近千吨,一般炼钢厂浇不了近千吨钢水,特别是长管碾煤机里多层环槽不太易机械加工,所以很多发电厂都使用只有一层环槽短管碾煤机,但该碾煤机要多个,还有钢球不易机械加工。三是耗水量大,一秒钟向涡轮机里喷一百公斤左右的水蒸气。四是要不断地花钱买煤买水。五消耗大气层氧气,排出二氧化碳。核动力机:主要用于发电厂,核反应堆的外壳一般是数米直径,十米左右高,几十厘米壁厚的锅炉,由昂贵的稀土元素合金冶炼的不锈钢,锅炉里装的是避免产生碳酸钙污垢的昂贵蒸馏水和百分之三的铀235 棒料,锅炉上方安放几十厘米厚,数米直径的盖子,盖子上是输水蒸气管道,管道通向大型涡轮机。另外还有一部二百多吨重的压水机,通过管道把冷水压进锅炉里,核裂变材料铀235在锅炉里发生裂变反应时产生几千度的高温,使锅炉里产生1秒几百公斤的水蒸气喷向涡轮机。主要问题是:消耗稀土元素多,千吨的锅炉是不易冶炼的稀土元素合金不锈钢,一般钢厂很难炼,也很难一次浇铸千吨级的钢水,核裂变材料在地球上储量稀少,矿石品位低,要通过冶炼后还要经过很多化工工序提纯,还要约几千个高速离心机高速多次离心提纯。核动力机还要配套很多高科技设备,投资需几十亿元才能建造。燃油涡轮机,这是烧煤油主动涡轮机,不是发电厂喷水蒸气从动涡轮机。烧煤油涡轮机主要是用于飞机的动力,其次是用于坦克的动力,它由压气扇叶片、涡轮叶片、涡轮轴、喷油嘴、油管、油泵、输油电机、外壳、发电机、启动电池组成。把压气扇叶片插在涡轮轴前端,有二三十片,二三十片的涡轮叶片插在涡轮轴后端,把涡轮轴装在外壳里的轴承上,压气扇叶片置于进气口,涡轮叶片置于喷气口,喷油嘴装在外壳里在压气扇叶片到涡轮叶片之间的外壳内壁上,喷油嘴的油管穿出外壳接在油泵上,油泵连接电机,电机电线连接电池,发电机轴连接压气扇端的涡轮轴上。把电池启动输油电机,电机带动油泵把油箱里的煤油输进外壳里油嘴喷出点火,产生燃爆发气推动涡轮叶片旋转喷出外壳喷气口,涡轮叶片带动涡轮轴旋转带动压气扇叶片和发电机旋转,压气扇叶片压缩空气进入外壳里助燃煤油,发电机发出的电带动输油电机,这时电池断供输油电机的电,涡轮机的优点是输出动力功率比上涡轮机重量的比值较大,缺点是:一、涡轮机输出的动力功率和1秒钟的燃油量的比值太小了,也就是高消耗油,低动力功率,比同等重量的内燃机的输出动力功率比 1秒钟消耗的燃油量的比值要小很多,很多发达国家为了节约油,在地面还是不用燃油涡轮机,只是美国在坦克上使用燃油涡轮机,机体小,腾出空间增加油箱体积,动力功率大,坦克跑得快。二、涡轮叶片是稀土元素耐高温合金钢,很昂贵。三、排出的二氧化碳比同等重量的内燃机排出的二氧化碳大得多。三是花比和同等重量的内燃机买油花的钱还要多。
技术实现要素:
4.本发明的目的是在于提供了一种串联交叉杠杆增长杠杆负力臂负力功距的主动力功率增大机,结构简单,使用方便,本发明主动力功率增大机各种部件形状简单,制造容易,成本低,不烧产二氧化碳的燃料,不排二氧化碳,环保,而且可成为人类的永久性机械能。
5.为了实现上述的目的,本发明采用以下技术措施:
6.其技术构思是:把省力杠杆的运动行程距离较短的负力臂的负力孔通过连接串联
交叉杠杆做负功运动,使串联交叉杠杆末端连杆的连孔做来复负功运动的行程距离扩增成较长的负功行程距离,也就是增大了负功量。把第一个串联交叉杠杆的末端连杆的连孔连接并作用于第二个省力杠杆,使第二个省力杠杆的负力臂的负力孔再连接作用于第二个串联交叉杠杆,使第二个串联交叉杠杆的末端连杆的连孔的负功运动行程距离不仅增长,而且力量也被增大,以此类推,继续串联下个机,就成了动力功率增大机。
7.一种串联交叉杠杆增长杠杆负力臂负力功距的主动力功率增大机,包括交叉杠杆、末端连杆、支撑杆、压撬杆、短弯杠杆、长弯杠杆、侧偏移位杠杆、专用杠杆、专用支撑杆、直行电机,其特征在于:所述的直行电机的推拉杆端头孔与一组短弯杠杆的主力孔连接,短弯杠杆的拉推孔与一组没有豁边的支撑杆的一端支撑孔连接,支撑杆的另一端支撑孔与一组压撬杆的主力孔连接,短弯杠杆的支撑孔与另一组支撑杆的支撑孔连接,另一组支撑杆的另一端支撑孔与压撬杆的支撑孔连接,短弯杠杆的负力孔与一组加组交叉杠杆的传力孔连接,加组交叉杠杆的支点孔与压撬杆的支点孔连接,将第一机的短弯杠杆的支点孔安装在机壳内的定位孔上,插定位销,第一机的末端连杆的连孔与第二机的长弯杠杆的主力臂的端头的主力孔连接,将第二机的长弯杠杆的支点孔安装在机壳内的定位孔上,插定位销,将第二机的末端连杆的连孔与第三机的侧偏移位杠杆的主力臂的端头主力孔连接,将第三机的侧偏移位杠杆的支点孔安装在机壳内的定位孔上,插定位销,将第三机的末端连杆的连孔与第四机的长弯杠杆的主力臂端头的主力孔连接,将第四机的长弯杠杆的支点孔安装在机壳内的定位孔上,插定位销,将第四机的末端连杆的连孔与大杠杆的主力臂的主力孔连接,将大杠杆的支点孔安装在机壳内的定位孔上,插定位销,将大杠杆的负力孔与推杆的上孔连接,将推杆的拉孔与拉杆的上孔连接,一组专用杠杆的支点孔安装在机壳内的定位孔上,插定位销,将第一机的末端连杆的连孔与专用杠杆的主力孔连接,将专用杠杆的负力孔与一组专用支撑杆的一端支撑孔连接,将专用支撑杆的另一端支撑孔与第二机的短弯杠杆的主力孔连接,所有的部件的孔与孔的连接的合孔都插进销钉上卡圈。
8.选两组每组由3-10个交叉杠杆组成一组的交叉杠杆,把这两组交叉杠杆互相交替垂直插并,使它们的中间支点孔互相对准连接,插进销钉,用卡圈卡在销钉末端卡槽里,这就成为一副交叉杠杆。选一副交叉杠杆的两组交叉杠杆的各自一端传力孔与另一副交叉杠杆的两组交叉杠杆的各自一端传力孔分别对准连接,插销钉、上卡圈。以此类推,可串联连接3-10副交叉杠杆,这就是一串交叉杠杆,也称串联交叉杠杆。把这一串交叉杠杆的一端的两组传力孔分别与由3-10 个组成一组的支撑杆一端的支撑孔、由3-10个组成一组的末端连杆的主力孔,分别对准连接,插销钉、上卡圈,再把这一组支撑杆的另一端支撑孔与这一组末端连杆的支点孔对准连接,插销钉上卡圈。再把这一串交叉杠杆另一端的两组传力孔分别与由3-10个组成一组的压撬杆的负力孔,再加由3-10个组成一组的加组交叉杠杆一端的传力孔分别对准连接,插销钉上卡圈,把这加组交叉杠杆的支点孔与这一组的压撬杆的支点孔对准连接,插销钉上卡圈,使这加组交叉杠杆与这一组压撬杆形成了交叉连接。把这加组交叉杠杆另一端的传力孔与由3-10个组成一组的短弯杠杆负力臂端的负力孔对准连接,插销钉、上卡圈。把这一组压撬杆的支撑孔与由3-10个组成一组的支撑杆的一端支撑孔对准连接,这组支撑杆的另一端支撑孔与这组短弯杠杆负力臂上的支撑孔对准连接,都插销钉上卡圈。把这组压撬杆的主力孔与另由3-10个组成一组的支撑杆的一端支撑孔对准连接。再把这另一组支撑杆的另一端支撑孔与这组短弯杠杆主力臂上的拉推孔对准连接,都
插销钉上卡圈。把这组短弯杠杆的支点孔与机壳内的定位孔对准连接,插上定位销。把这组短弯杠杆主力臂端的主力孔和启动直行电机的推拉杆外端孔连接,插销钉、上卡圈。电机的机体悬挂孔安装在机壳内的悬挂定位孔上,插上定位销。这就是第一部串联交叉杠杆负力功距扩增机,简称第一机。当直行电机的推拉杆(也可称连杆)做推拉来复主功运动时,带动短弯杠杆主力臂端头的主力孔做摆动运动,也使短弯杠杆主力臂上的拉推孔拉推支撑杆,支撑杆再拉推压撬杆的主力孔,使压撬杆做摆动压撬运动,短弯杠杆做摆动运动时,短弯杠杆的负力臂端头的负力孔也做摆动负功运动。也带动了加组交叉杠杆也做摆动运动,这样压撬杆和加组交叉杠杆一起做合拢、张开摆动运动,也带动了串联交叉杠杆做来复伸缩运动,使串联交叉杠杆的末端连杆的连孔也做来复负功运动。串联交叉杠杆的串联副数量越多,末端连杆的连孔做的来复负功运动的行程距离越长,多多长于短弯杠杆负力臂的负力孔所做的摆动负功运动的短行程距离,也就是末端连杆的连孔做的来复负功运动的负功量大于短弯杠杆负力臂的负力孔做的摆动负功运动的负功量,也就是通过多副串联交叉杠杆做伸缩来复运动,使串联交叉杠杆的末端连杆的连孔做的来复负功运动变相地代替了短弯杠杆负力臂的负力孔做的摆动负功运动。所以也就是末端连杆的连孔做的来复负功运动产生的比短弯杠杆负力臂的负力孔做的摆动负功运动的短行程距离还长得多的长负功行程距离、和产生的比短弯杠杆的负力孔做的摆动负功运动的小负功量还大得多的大负功量,变相地算是短弯杠杆负力臂的负力孔做的摆动负功运动的长行程距离和大负功量。
9.第一机的末端连杆的连孔与第二机的长弯杠杆主力臂端头的主力孔连接,插销钉上卡圈。第二机的末端连杆的连孔与第三机的侧偏移位杠杆主力臂端头的主力孔连接,插销钉上卡圈。第三机的末端连杆的连孔与第四机的长弯杠杆主力臂端头的主力孔连接,插销钉上卡圈。第四机的末端连杆的连孔与大杠杆主力臂端头的主力孔连接,插销钉上卡圈。大杠杆负力臂端头的负力孔与推杆的上孔连接,插销钉上卡圈。推杆上孔附近的拉孔与拉杆的上孔连接,插销钉上卡圈。推杆的下孔与已组装在从动左右端棘齿轮内花键套上的主动右端棘齿轮的杠杆端头的推孔连接,插销钉上卡圈。拉杆的下孔与已组装在从动左右端棘齿轮内花键套上的主动左端棘齿轮的杠杆端头的拉孔连接,插销钉上卡圈。各机的弯杠杆、侧偏移位杠杆的支点孔和大杠杆的支点孔都安装在机壳内各自的定位孔上,插定位销。安装在从动左右端棘齿轮内花键套上的主动左和右端棘齿轮都安装复位弹簧,从动左右端棘齿轮内花键套安装在机壳内的轴承位上(因公知性,没画轴承位图)。第一机和第二机、第二机和第三机、第三机和第四机都是互相作相反方向和倒扣形态关系。这就是串联交叉杠杆增长杠杆负力臂负力功距的主动力功率增大机。
10.所述的压撬杆,弯杠杆负力臂端头的负力孔与一串交叉杠杆一端一组的交叉杠杆的传力孔连接,通过该传力孔的交叉杠杆的另一端传力孔继续串联下一个传力孔以及交叉杠杆,这一线的交叉杠杆就属于弯杠杆脉的交叉杠杆,弯杠杆的负力孔就把力传给这和弯杠杆负力孔串联连接的这一线脉的交叉杠杆。另一线脉的交叉杠杆就会闲着得不到传动力。就把这另一线脉的交叉杠杆的一端的传力孔和压撬杆的负力孔连接,压撬杆的主力孔连接一组支撑杆的一端,支撑杆另一端连接弯杠杆主力臂上的拉推孔,弯杠杆主力臂的动力就传给支撑杆和压撬杆,压撬杆通过摆动运动就把力传给了这另一线脉的交叉杠杆了,这另一线脉的交叉杠杆就属于压撬杆脉交叉杠杆。从压撬杆的支撑孔心到主力孔心的孔心距离和支撑杆两端的孔心距离相等,和所有弯杠杆、侧偏移位杠杆的支撑孔心到拉推孔心
距离相等。
11.把第一机的末端连杆的连孔与由3-10个组成一组的专用杠杆一端的主力孔连接,插销钉上卡圈,专用杠杆另一端支点孔安装在机壳内的定位孔上,插定位销,专用杠杆中间段的负力孔与由3-10个组成一组的专用支撑杆一端的支撑孔连接,插销钉上卡圈,专用支撑杠杆的另一端支撑孔与第二机的短弯杠杆主力臂端头的主力孔连接,插销钉、上卡圈,这专用机的特点是这两机之间的距离靠得较近,适合装配公路跑车,装进车头里,车头低矮,不妨碍驾驶员的视线。
12.组装和总装和维修串联交叉杠杆增长杠杆负力臂负力功距的主动力功率增大机时要防止和避免夹手。
13.一种把省力杠杆的做摆动负功运动行程距离较短的负力臂的负力孔通过连接并作用于串联交叉杠杆做伸缩负功运动,使串联交叉杠杆的末端连杆的连孔做来复负功运动的行程距离获得扩增成较长的做来复负功运动行程距离,也就是增大了该末端连杆的连孔做的大的负功量,变相达到增大了主力源直行电机的主力功和主动力功率。它启动主动力功率小,最后终端输出的动力功率增大了很多倍。
14.本发明是弯杠杆的较短的负力臂的负力孔做摆动负功运动时,所做的负功距离较短,但该负力孔却带动了通过连接的多副串联的交叉杠杆也做负功伸缩运动,造成了串联交叉杠杆末端连杆的连孔做的来复负功运动的行程距离多多长于弯杠杆的负力臂的负力孔做的负功摆动运动行程距离。如该末端连杆的连孔带动适度的大负力的话,该连孔做的负功量大于弯杠杆负力臂的负力孔做的负功量,也大于主力源直行电机做的主功量,反过来说就是变相地增大了主力源直行电机做的主力功,除以做功时间,也就是增大了主力源直行电机的动力功率。多个机组串联起来,那么末端机组输出动力功率远远大于主力源直行电机的主动力功率。如带动一部功率较大的发电机,再把发电机的电返回一小部分电供主力源直行电机,那么本发明就打破了詹姆斯焦耳能量守恒定律。
15.本发明解决的技术问题和难点是:本发明利用了串联交叉杠杆做来复伸缩负功运动,变相地增长了弯杠杆负力臂的负力孔做的摆动负功运动的负功距离,增大负功量,除以做功时间,就是增加了输出动力功率;难点:本发明由于利用串联交叉杠杆技术变相地增长了弯杠杆负力臂的负力孔做的负功距离,增加了做负功量,也就克服了比主力源直行电机的主力或做的主功大得多的负力或负功。达到的技术效果是本发明中启动直行电机的动力功率小,输出的动力功率大。本发明的进步在于不烧石油、不用外界电、不烧煤、更不用核裂变材料,节约了经济,不排放二氧化碳。本发明技术方案是用电量少,输出的动力功率比用电量功率大。现有的技术是用多少能源物,就产生多大的动力功率,工作效率低。
16.本发明的杠杆负力臂的负力孔做的摆动负功运动并作用通过连接的串联交叉杠杆做来复伸缩负功运动,使与串联交叉杠杆连接的末端连杆的连孔做的来复负功运动的负功距离和杠杆负力臂的负力孔做的摆动负功运动的负功距离的比值量运算式:规定短弯杠杆的支撑孔心到负力孔心之间的距离和支撑杆两端的支撑孔心之间的距离,和压撬杆的支撑孔心到支点孔心的距离,和压撬杆的支点孔心到负力孔心之间的距离,和交叉杠杆的传力孔心到支点孔心的距离都相等,设为r为代表符号,设直行电机推拉杆推拉短弯杠杆的主力孔时,短弯杠杆做32
°
摆动运动。设串联的每副交叉杠杆的两个交叉杠杆组互相处于垂直状态时(如:图32),从短弯杠杆的支撑孔心到压撬杆的支点孔心的距离为1.414r。当直行电
机的推拉杆做伸缩运动时,也推拉短弯杠杆做32
°
摆动运动,也带动串联交叉杠杆的每副交叉杠杆的两个交叉杠杆组由互相垂直张开到合并拢状态(如:图 33),各交叉杠杆都做32
°
摆动运动。那么短弯杠杆的负力孔心做32
°
摆动负功运动的负功距离就是2rπ
×
32
°
/360
°
=2r
×
3.14
×
0.0888=0.557664r。当直行电机的推拉杆伸出时,推动短弯杠杆摆动,也带动每付交叉杠杆的两组交叉杠杆由垂直张开状态到合并拢状(如:图33),设从短弯杠杆的支撑孔心到压撬杆的支点孔心的距离为x。当直行电机的推拉杆回缩时,拉动短弯杠杆摆动,带动每副交叉杠杆的两组交叉杠杆由合并拢到垂直张开状,设从短弯杠杆的支撑孔心到压撬杆的支点孔心的距离为y,那么con45
°‑
32
°
=1/2x
÷
r=0.9744,1/2 x=0.9744r,x=2
×
0.9744r=1.9488r。con45
°
=1/2y
÷
r=0.7071,1/2y=0.7071r, y=2
×
0.7071r=1.4142r。短弯杠杆的负力孔心做32
°
摆动运动时,向前后做来复的负功运动距离是1/2x-1/2y=0.9744r-0.7071r=0.2673r。压撬杆的支点孔心做的来复负功运动的距离是x-y=1.9488r-1.4142r=0.5346r。接近短弯杠杆的负力孔做32
°
摆动负功运动的负功距离0.557664r。那么第一副交叉杠杆的支点孔心向前后做伸缩来复负功运动距离是2
×
0.5346r=1.0692r,超过了短弯杠杆的负力孔做32
°
摆动负功运动做的负功距离0.557664r,这是人类新串联交叉杠杆机械能源的第一亮光。那么第二副交叉杠杆的支点孔心做伸缩来复负功运动距离是3
×
0.5346r=1.6038r。第三副交叉杠杆的支点孔心做伸缩来复负功运动距离是 4
×
0.5346r=2.1384r。末端连杆的支点孔心做伸缩来复负功运动距离是5
×ꢀ
0.5346r=2.673r。2.673
÷
0.557664≈4.79。本发明的第一机的末端连杆的支点孔心变相地为直行电机的主动力功率提高增大了4.79倍,再加上串联了第二机和第三机和第四机,那么直行电机的主动力功率被第四机的末端连杆的连孔心变相地增大了4
×
4.79=19.16倍。
17.本发明与现有技术相比,具有以下优点和效果:
18.本发明与内燃机比,内燃机活塞产生一次冲程动力功率后,还要无谓消耗四分之三的时间不产生动力功率,有很多报道汽车内燃机因需带汽油而无征兆地自燃火灾。本发明没有无谓消耗时间,不带燃油,无火灾源。本发明与电机比:电机消耗的电产生的动力功率有限,本发明消耗的电量少,增大的动力功率近20 倍。本发明与烧煤动力机比,烧煤动力机的锅内壁时间用长了易产生碳酸钙污垢,碳酸钙导热率低,易降低热转换动力率,减少水蒸气和动力功率。另外烧煤机需携带大量的煤,还要配备大动力功率的注水机,整个烧煤机的体积体重都很笨重大。本发明就不需要煤,不要燃料箱,体重就轻。本发明与核动力机比,本发明不需要像核动力机那样过度高成本的复杂高科技技术,不需要无谓的消耗过多的稀土元素,不需要昂贵稀土元素冶炼的近千吨的高级不锈钢做的核反应堆外壳,更不需要核反应裂变材料。本发明不需要不断地花钱买燃油、买电、买煤、买核裂变材料。本发明的效果是使用的电动力功率小,可输出的动力功率大,克服的负力大。
19.本发明用的能源物量少,输出的动力功率大,工作效率高。结构简单,使用方便,本发明主动力功率增大机各种部件形状简单,制造容易,成本低,只需要一部激光切割机,一部低温激光淬火机,一部冲床,一部小钻床就可生产本发明的所有偏薄件。就切割连打孔和淬火两道工序,一间小型车间就可成为本发明的生产厂。就是外壳生产有点困难,需几十或上百对浇铸钢模。不烧产二氧化碳的燃料,不排二氧化碳,环保,而且效果可成为人类的永久性机械能。
附图说明
20.图1为一种串联交叉杠杆增长杠杆负力臂负力功距的主动力功率增大机的交叉杠杆的结构示意图(交叉杠杆是本发明的第一主件)。
21.图2是图1的俯视图。
22.图3为一种串联交叉杠杆增长杠杆负力臂负力功距的主动力功率增大机的末端连杆的结构示意图。
23.图4是图3的俯视图。
24.图5为一种串联交叉杠杆增长杠杆负力臂负力功距的主动力功率增大机的支撑杆的结构示意图。
25.图6是图5的俯视图。
26.图7为一种串联交叉杠杆增长杠杆负力臂负力功距的主动力功率增大机的压撬杆的结构示意图。
27.图8是图7的俯视图。
28.图9为一种串联交叉杠杆增长杠杆负力臂负力功距的主动力功率增大机的短弯杠杆的结构示意图。
29.图10是图9的俯视图。
30.图11为一种串联交叉杠杆增长杠杆负力臂负力功距的主动力功率增大机的长弯杠杆的结构示意图。
31.图12是图11的俯视图。
32.图13为一种串联交叉杠杆增长杠杆负力臂负力功距的主动力功率增大机侧偏移位杠杆的结构示意图。
33.图14是图13的俯视图。
34.图15为一种串联交叉杠杆增长杠杆负力臂负力功距的主动力功率增大机专用杠杆的结构示意图。
35.图16是图15的左视图。
36.图17为一种串联交叉杠杆增长杠杆负力臂负力功距的主动力功率增大机专用支撑杆的结构示意图。
37.图18是图17的左视图。
38.图19为一种串联交叉杠杆增长杠杆负力臂负力功距的主动力功率增大机大杠杆的结构示意图。
39.图20是图19的俯视图。
40.图21为一种串联交叉杠杆增长杠杆负力臂负力功距的主动力功率增大机推杆的结构示意图。
41.图22是图21的a向图。
42.图23为一种串联交叉杠杆增长杠杆负力臂负力功距的主动力功率增大机拉杆的结构示意图。
43.图24是图23的俯视图。
44.图25为一种串联交叉杠杆增长杠杆负力臂负力功距的主动力功率增大机主动左端棘齿轮的结构示意图。
45.图26是图25的左视图。
46.图27为一种串联交叉杠杆增长杠杆负力臂负力功距的主动力功率增大机主动右端棘齿轮的结构示意图。
47.图28为一种串联交叉杠杆增长杠杆负力臂负力功距的主动力功率增大机的从动左右端棘齿轮内花键套的结构示意图。
48.图29是把主动左端棘齿轮和主动右端棘齿轮分别左右各自装配在从动左右端棘齿轮内花键套上的左右端棘齿轮位置上,并左右装上主动左端棘齿轮和主动右端棘齿轮各自的复位弹簧的结构示意图。
49.图30是选3-10个交叉杠杆组成一组交叉杠杆,再把两组交叉杠杆互相一个接一个的交替插并,并互相中间支点孔对准并互相垂直地连接,对中间支点孔插销钉,在销钉尾端环槽上装上卡圈的结构示意图。
50.图31是图30的左视图,这就是叫作一副交叉杠杆。
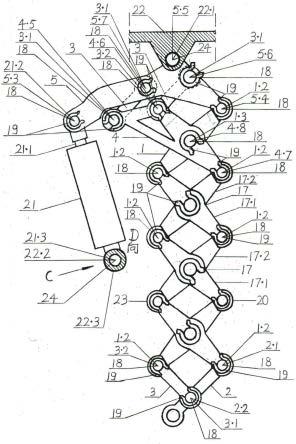
51.图32是由多副交叉杠杆互相传力孔连接串联的一串交叉杠杆,这一串联交叉杠杆的一端的两个传力孔分别与一组末端连杆的主力孔和一组支撑杆一端支撑孔连接,这组末端连杆的支点孔与这组支撑杆另一端支撑孔连接。这一串联交叉杠杆的另一端的两个传力孔分别与一组压撬杆的负力孔和一组加组交叉杠杆的传力孔连接。这一组压撬杆的支点孔与加组交叉杠杆的支点孔连接,加组交叉杠杆另一端的传力孔与一组短弯杠杆的负力孔连接。这组压撬杆的支撑孔与一组支撑杆一端的支撑孔连接,这组支撑杆另一端的支撑孔与这组短弯杠杆的支撑孔连接,这组压撬杆的主力孔与另一组支撑杆一端的支撑孔连接,这另一组支撑杆另一端的支撑孔与这组短弯杠杆的拉推孔连接,连接孔都插销钉、上卡圈。短弯杠杆的支点孔安装连接在机壳内的定位孔上,插定位销。短弯杠杆的主力孔与直行电机推拉杆外端孔连接,插销钉、上卡圈。直行电机机体悬挂孔安装在机壳内的定位孔上等等。组合成一部串联交叉杠杆负力功距扩增机,简称第一机。
52.图33是第一机在直行电机推拉杆向外推行下,串联的交叉杠杆从由图32的收缩形向图33伸展出的示意图。
53.图34是图32、33的c向示意图。图32、33的直行电机机体的悬挂孔安装在机壳内的定位孔的孔圈剖视图是图34的d向示意图。
54.图35是第一机的末端连杆的连孔与第二机的长弯杠杆的主力臂的主力孔连接,插销钉上卡圈。第二机的长弯杠杆的支点孔安装在机壳内的定位孔上,插定位销。第二机的末端连杆的连孔与第三机的侧偏移位杠杆的主力臂的主力孔连接,插销钉上卡圈。(为避免妨碍对第一机的观视,免绘画了和第一机侧平行,处于第一机背面位置的第三机),第一机和第二机的方向互相相反,互相作倒扣的形态关系的示意图。
55.图36是第三机的末端连杆的连孔与第四机的长弯杠杆的主力臂的主力孔连接,插销钉上卡圈。第四机的末端连杆的连孔与大杠杆的主力臂的主力孔连接,插销钉上卡圈。第三机的侧偏移位杠杆的支点孔和第四机的长弯杠杆的支点孔和大杠杆的支点孔都分别安装在机壳内各自的定位孔上,插定位销。第三机和第四机的朝向互相相反,互相作倒扣的形态关系的示意图。
56.图37是由多个第三机的侧偏移位杠杆并联连接组成一组的侧偏移位杠杆的移位状态示意图,上部份主力臂端部和第二机是图35的e向图,下部份主力臂根部的支点孔及负
力臂和第三机是图36的f-f向示意图
57.图38是安装在机壳内定位孔上的大杠杆负力臂端部的负力孔与推杆的上孔连接,插销钉上卡圈。推杆的拉孔与拉杆的上孔连接,插销钉上卡圈。推杆的下孔与图29的b向图的主动右端棘齿轮杠杆的推孔连接,插销钉上卡圈。拉杆的下孔和图29的b向图的主动左端棘齿轮杠杆的拉孔连接,插销钉上卡圈的示意图。
58.图39是把第一机的末端连杆的连孔与由3-10个组成一组的专用杠杆一端的主力孔连接,插销钉上卡圈,专用杠杆另一端支点孔安装在机壳内的定位孔上,插定位销。专用杠杆中间的负力孔与由3-10个组成一组的专用支撑杆一端的支撑孔连接,插销钉上卡圈。专用支撑杆另一端的支撑孔与第二机的短弯杠杆主力臂端头的主力孔连接组合成专用机的示意图,这种专用机的特点是第一机和第二机之间的距离较短,适合装配公路跑车,装进车头里,车头较低,不妨碍驾驶员的视线。
具体实施方式
59.实施例1:
60.根据图1、图2、图3、图4、图5、图6可知,一种串联交叉杠杆增长杠杆负力臂负力功距的主动力功率增大机,包括交叉杠杆1、末端连杆2、支撑杆3、压撬杆4、短弯杠杆5、长弯杠杆6、侧偏移位杠杆7、专用杠杆8、专用支撑杆 9、以及配套的直行电机21,其特征在于:所述直行电机21的推拉杆端头孔21.2 与第一机的一组并联的短弯杠杆5的主力孔5.3连接,并联的短弯杠杆5的拉推孔5.7与一组并联没有豁边3.3的支撑杆3的一端支撑孔3.1连接,支撑杆3 的另一端支撑孔3.1与一组并联的压撬杆4的主力孔4.5连接,因与短弯杠杆5 的拉推孔5.7和压撬杆4的主力孔4.5连接的支撑杆3的两端支撑孔不需要豁边 3.3,所以与短弯杠杆5的拉推孔5.7和压撬杆4的主力孔4.5连接的支撑杆3 的两端支撑孔的编号都设为是3.1。并联的短弯杠杆5的支撑孔5.6与另一组并联的支撑杆3的支撑孔3.1连接,另一组支撑杆3的另一端支撑孔3.2与一组并联的压撬杆4的支撑孔4.6连接。并联的短弯杠杆5的负力孔5.4与一组并联的加组交叉杠杆1的传力孔1.2连接,并联的加组交叉杠杆1的支点孔1.3与压撬杆4的支点孔4.8连接。把一组并联的交叉杠杆1与另一组并联的交叉杠杆1 互相一个个交替插并,并且这两组交叉杠杆1的支点孔1.3都对准连接,插进销钉18,在销钉尾端环槽上上卡圈19。这两组交叉杠杆1互相垂直交叉,这就形成一副交叉杠杆17,一组并联的交叉杠杆1的编号由1改成17.1,另一组交叉杠杆1的编号由1改成17.2,其它编号不变。把第一副交叉杠杆17的一组交叉杠杆17.1传力孔1.2与第二副交叉杠杆17的另一组交叉杠杆17.2的传力孔1.2 连接,所述的第一副交叉杠杆17的另一组交叉杠杆17.2的传力孔1.2与第二副交叉杠杆17的一组交叉杠杆17.1的传力孔1.2连接,以此类推,多副(3-10) 交叉杠杆17串联成一串交叉杠杆20,也称串联交叉杠杆20,再把一串交叉杠杆 20的一端的两个传力孔1.2分别与加组的交叉杠杆1的另一传力孔1.2和压撬杆4的负力孔4.7连接,所述的一串交叉杠杆20的另一端的两个传力孔1.2分别与一组并联的末端连杆2的主力孔2.1、一组并联的支撑杆3的支撑孔3.2连接,所述末端连杆2的支点孔2.2与支撑杆3的支撑孔3.1连接,所有的孔与孔的连接的合孔都插上销钉18、上卡圈19,这就是串联交叉杠杆增长杠杆负力臂负力功距的主动力功率增大机的第一部串联交叉杠杆负力功距扩增机,简称第一机23,第一机23的短弯杠杆5的支点孔5.5安装在机壳22的定位孔22.1上,插定位销24。
61.图1是交叉杠杆1,是本发明的第一主件,两端段同等长的杆是力臂1.1,两端头的孔是传力孔1.2,中间是支点孔1.3,两端传力孔1.2都有豁边1.4,是防相邻部件相撞。图2是图1的俯视图,从图2看出,交叉杠杆是扁薄形。图 3是末端连杆2,简称末端杆,一端是主力孔2.1,内段孔是支点孔2.2,另一端孔是连孔2.3,主力孔2.1有豁边2.4,图4是图3的俯视图,图4显示末端连杆2是扁薄形。
62.图5是支撑杆3,两端是支撑孔3.1和3.2,支撑孔3.2有豁边3.3。图6 是图5的俯视图。图6显示支撑杆3是扁薄形。图7是压撬杆4,4.1和4.2是联合弯形主力臂,4.3是支持4.1和4.2联合弯形主力臂的加强筋,4.4是负力臂,主力臂4.2端头是主力孔4.5,联合弯形主力臂4.1和4.2之间是支撑孔4.6,负力臂4.4端头是负力孔4.7,主力臂4.1和负力臂4.4之间是支点孔4.8,支撑孔4.6有豁边4.9,负力孔4.7有豁边4.10。图8是图7的俯视图,压撬杆4 是扁薄形。
63.图9是短弯杠杆5,5.1是主力臂,5.2是负力臂,5.3是主力臂5.1端头的主力孔,5.4是负力臂5.2端头的负力孔,5.5是支点孔,5.6是位于负力臂 5.2上的支撑孔,支撑孔5.6也可以当支点孔用,5.7是位于主力臂5.1上的拉推孔,负力孔5.4有豁边5.8。图10是图9俯视图,短弯杠杆5是扁薄形。
64.图11是长弯杠杆6,6.1是主力臂,6.2是负力臂,6.3是主力臂6.1端头的主力孔,6.4是负力臂6.2端头的负力孔,6.5是支点孔,6.6是位于负力臂6.2上的支撑孔,支撑孔6.6也可以当支点孔用,6.7是位于主力臂6.1上的拉推孔,负力孔6.4有豁边6.8。图12是图11的俯视图,长弯杠杆6是扁薄形。
65.图13是侧偏移位杠杆7,7.1是主力臂,7.2是负力臂,7.3是主力臂7.1 端头的主力孔,7.4是负力臂7.2端头的负力孔,7.5是支点孔,7.6是位于负力臂7.2上的支撑孔,支撑孔7.6也可以当支点孔用,7.7是位于主力臂7.1上的拉推孔,负力孔7.4有豁边7.8。图14是图13的俯视图,侧偏移位杠杆7是扁薄形,从图14可以看出,侧偏移位杠杆7的主力臂7.1是侧偏移位形状。
66.图15是专用杠杆8,整个杠杆都是主力臂、用8.1代表,8.2是负力臂,8.3 是主力孔,8.4是负力孔,8.5是支点孔,即从负力孔8.4孔心到支点孔8.5孔心之间的部位就是负力臂8.2,从主力孔8.3孔心到支点孔8.5孔心之间整段都是主力臂8.1。图16是图15的左视图,图16显示专用杠杆8是扁薄形。
67.图17是专用支撑杆9,专用支撑杆9的两端是支撑孔9.1。图18是图17的左视图,专用支撑杆9是扁薄形。
68.图19是大杠杆10,10.1是主力臂,10.2是负力臂,10.3是主力孔,10.4 是负力孔,10.5是支点孔。图20是图19的俯视图。从图20中可以看出,主力孔10.3是多岔形,负力孔10.4是两岔形。
69.图21是推杆11,11.1是上孔,11.2是下孔,11.3是拉孔。图22是图21 的a向图,从图22中可以看出下孔11.2是两岔形,拉孔11.3是两岔形。
70.图23是拉杆12,12.1是上孔,12.2是下孔。图24是图23的俯视图,从图 24中可以看出,下孔12.2是两岔形。
71.图25是主动左端棘齿轮13,图25中标记13.1是主动左端棘齿、13.2是主动左端棘齿轮13的杠杆、13.3是主动左端棘齿轮13的杠杆13.2端头的拉孔、 13.4是主动左端棘齿轮
13的装位孔。图26是图25的左视图,图26中标记13.5 是主动左端棘齿轮13的装位孔13.4的稳定套。图27是主动右端棘齿轮14的侧面图,图27中标记14.1是主动右端棘齿、14.2是主动右端棘齿轮14的杠杆、 14.3是主动右端棘齿轮14的杠杆14.2端头的推孔、14.4是主动右端棘齿轮14 的装位孔(虚线)、14.5是主动右端棘齿轮14的装位孔14.4的稳定套。图28 是从动左、右端棘齿轮内花键套15,图中标记15.1是从动左右端棘齿轮内花键套15的从动左端棘齿、15.2是从动右端棘齿、15.3是从动左右端棘齿轮内花键套15的左内花键套、15.4是右内花键套、15.5是从动左右端棘齿轮内花键套15的内花键(四条横虚线)。图29是把主动左端棘齿轮13的装位孔13.4(图中免标号)套装在从动左右端棘齿轮的内花键套15的左内花键套15.3上,再装上主动左端棘齿轮13的复位弹簧16,使主动左端棘齿轮13的主动左端棘齿13.1 与从动左右端棘齿轮内花键套15的从动左端棘齿15.1啮合。把主动右端棘齿轮 14的装位孔14.4(图中免标号)套装在从动左右端棘齿轮内花键套15的右内花键套15.4上,再装上主动右端棘齿轮14的复位弹簧16,使主动右端棘齿轮14 的主动右端棘齿14.1与从动左右端棘齿轮内花键套15的从动右端棘齿15.2啮合。
72.图30和它的左视图图31是一副交叉杠杆17,它是选3-10个交叉杠杆1组成第一组交叉杠杆17.1,再选3-10个交叉杠杆1组成第二组交叉杠杆17.2,这两组交叉杠杆17.1与17.2互相之间每一交叉杠杆交替垂直插并排列,互相对准中间支点孔1.3,插进销钉18,在销钉18尾槽上卡上卡圈19,这两组交叉杠杆 17.1与17.2互相摆成垂直交叉状,这就是一副交叉杠杆17。
73.图32中3-10副交叉杠杆17互相串联,具体串联方式是把第一副交叉杠杆 17的第一组交叉杠杆17.1的一端传力孔1.2与第二副交叉杠杆17的第二组交叉杠杆17.2的一端传力孔1.2对准连接,插销钉18、上卡圈19,再把第一副交叉杠杆17的第二组交叉杠杆17.2的一端传力孔1.2与第二副交叉杠杆17的第一组交叉杠杆17.1的一端传力孔1.2对准连接,插销钉18、上卡圈19。以此类推,把3-10副交叉杠杆17就这样串联起来,这就是一串交叉杠杆20,也称串联交叉杠杆。把这一串交叉杠杆20的一端传力孔1.2与由3-10个末端连杆2 并联组成一组的末端连杆2的主力孔2.1连接,插销钉18上卡圈19,另一个传力孔1.2与由3-10个并联组成一组的支撑杆3的一端的支撑孔3.2连接,插销钉18上卡圈19,把支撑杆3的另一端支撑孔3.1与末端连杆2的支点孔2.2连接,插销钉18上卡圈19,把这一串交叉杠杆20的另一端一传力孔1.2与由3-10 个并联组成一组的压撬杆4的负力孔4.7连接,插销钉18上卡圈19,另一传力孔1.2与由3-10个交叉杠杆1组成的加组交叉杠杆1的传力孔1.2连接,插销钉18上卡圈19,把压撬杆4的支点孔4.8与加组的交叉杠杆1的支点孔1.3连接,插销钉18上卡圈19,把加组交叉杠杆1的另一端传力孔1.2与由3-10个并联组成一组的短弯杠杆5的负力孔5.4连接,插销钉18上卡圈19,把压撬杆4的支撑孔4.6与由3-10个组成一组的支撑杆3的支撑孔3.2连接,支撑杆3 的另一端支撑孔3.1与短弯杠杆5的支撑孔5.6连接,都插销钉18上卡圈19,把压撬杆4的主力孔4.5与由3-10个并联组成一组的另一支撑杆3,的一端支撑孔3.1连接,支撑杆3的另一端支撑孔3.1与短弯杠杆5的拉推孔5.7连接,都插销钉18上卡圈19,该支撑杆因与短弯杠杆5的拉推孔5.7和压撬杆4的主力孔4.5连接的支撑杆3的两端支撑孔不需要豁边3.3,所以与短弯杠杆5的拉推孔5.7和压撬杆4的主力孔4.5连接的支撑杆3的两端支撑孔的编号都设为是 3.1。把短弯杠杆5的主力孔5.3与启动直行电机21的推拉杆21.1外端孔21.2 连接,插销钉18上卡圈19,这就是一部串联交叉杠杆负力功距扩增机23,
简称第一机。然后再把第一机的短弯杠杆5的支点孔5.5安装在机壳22内的定位孔 22.1上,插定位销24,把电机21的悬挂孔21.3安装在机壳22内的悬挂定位孔 22.2上,插定位销24,剖视斜线是机壳22定位孔22.2的孔圈22.3。
74.图33是图32的功能效应图,电机21的推拉杆21.1在图32回缩时,串联的一串交叉杠杆20的每副交叉杠杆17的第一组交叉杠杆17.1和第二组交叉杠杆17.2互相处于张开垂直状,使一串交叉杠杆20处于回缩状,到图33时电机21的推拉杆21.1伸出,推动短弯杠杆5做摆动运动,短弯杠杆5也带动压撬杆 4和加组交叉杠杆1做摆动运动,使压撬杆4和加组交叉杠杆1由张开状到合拢状,也带动一串交叉杠杆20由回缩状做延伸状来复负功运动,见图33。拿图32 和图33对比,从图32中的连孔2.3到图33中的连孔2.3之间做的伸缩来复负功运动的距离幅度很长,长于短弯杠杆5负力孔5.4做的摆动负功运动距离幅度。串联的交叉杠杆17的副数越多,连孔2.3做的伸缩来复负功运动距离幅度越长,也就是连孔2.3做的负力功越大,也就是通过串联多副交叉杠杆17做的伸缩负功运动作用,使连孔2.3做的较大的负力功变相地代替了短弯杠杆5负力孔5.4 做的较小的负力功。如连孔2.3做的较大的负力功除于做负力功的时间,那么连孔2.3做的负力功率也很大,也就是串联交叉杠杆负力功距扩增机23变相地成为了直行电机21的动力功率增大机。
75.图34是图32、图33的c向图,图32和图33的机壳22内的直行电机21 的悬挂定位孔22.2的孔圈22.3(剖视斜线图所示)是图34的d向图。图34中标记22.2位置是直行电机21的悬挂定位孔(虚线所示)、22.3是直行电机21 在机壳22内的悬挂定位孔22.2的孔圈、22.4是直行电机21在机壳22内的悬挂定位孔22.2的孔圈22.3的支撑构件。
76.图35是第一机23的末端连杆2的连孔2.3与第二机25的长弯杠杆6的主力臂6.1的端头的主力孔6.3连接,插销钉18、上卡圈19,把第二机25的长弯杠杆6的支点孔6.5安装在机壳22内的定位孔22.5上,插定位销24,把第二机25的末端连杆2的连孔2.3与第三机的侧偏移位杠杆7的主力臂7.1的端头主力孔7.3连接,插销钉18上卡圈19。从图35中看出第一机23的一串交叉杠杆20和第二机25的一串交叉杠杆20的伸缩方向相反,这两机又互相作倒扣状态关系。
77.图36是把第三机26的末端连杆2的连孔2.3与第四机27的长弯杠杆6的主力臂6.1端头的主力孔6.3连接,插销钉18(图中标记18表示销钉头),把第四机27的末端连杆2的连孔2.3与大杠杆10的主力臂10.1端头的主力孔10.3 连接,插销钉18,把第三机26的侧偏移位杠杆7的支点孔7.5安装在机壳22 内的定位孔22.6上,插定位销24,把第四机27的长弯杠杆6的支点孔6.5安装在机壳22内的定位孔22.7上,插定位销24。把大杠杆10的支点孔10.5安装在机壳22内的定位孔22.8上,插定位销24。图36中第三机26的一串交叉杠杆20和第四机27的一串交叉杠杆20伸缩方向相反,这两机互相作倒扣状态关系。这样多机串联可继续增大直行电机动力功率。
78.图37是由3-10个侧偏移位杠杆7并联组成一组的侧偏移位杠杆7,标记18 表示销钉,标记19表示卡圈,标记28是侧偏移位杠杆7支点孔7.5之间的垫圈,标记24表示定位销。概观图37的上部分是图35的e向图,下部分是图36的 f-f向图。图38是把大杠杆10的负力孔10.4与推杆11的上孔11.1连接,插销钉18、上卡圈19,把推杆的拉孔11.3与拉杆12的上孔12.1连接,插销钉 18上卡圈19,把推杆11的下孔11.2与图29的b向图的主动右端棘齿轮14的杠杆14.2端头推孔14.3连接,插销钉18、上卡圈19,把拉杆12的下孔12.2 与图29的b向图
的主动左端棘齿轮13(被遮挡)的杠杆13.2的端头拉孔13.3 连接,插销钉18上卡圈19。图38中标记15是从动左右端棘齿轮内花键套,15.5 是内花键。
79.从图35到图38就是基本完整的串联交叉杠杆增长杠杆负力臂负力功距的主动力功率增大机。
80.图39是公路跑车专用串联交叉杠杆增长杠杆负力臂负力功距的主动力功率增大机。把由3-10个并联组成一组专用杠杆8的支点孔8.5安装在机壳22内的定位孔22.9上,插定位销24,把第一机23的末端连杆2的连孔2.3与专用杠杆8的主力孔8.3连接,插销钉18、上卡圈19,将专用杠杆8的负力孔8.4与由3-10个并联组成一组的专用支撑杆9的一端支撑孔9.1连接,插销钉18、上卡圈19,将专用支撑杆9的另一端支撑孔9.1与第二机25的短弯杠杆5的主力孔5.3连接,插销钉18、上卡圈19,这种机型的特点就是第一机23和第二机 25之间的距离靠得较近,装进公路跑车头里,不至于车头过高遮挡驾驶者视线。该机后部分免叙,只讲专用杠杆8的专用。
81.第一机23的直行电机21的推拉杆21.1做伸缩来复主功运动,带动与推拉杆21.1端头孔21.2连接的短弯杠杆5的主力孔5.3及短弯杠杆5做摆动运动,也带动短弯杠杆5的拉推孔5.7做摆动运动,也带动支撑杆3做来复运动,再带动压撬杆4做摆动运动;短弯杠杆5也带动它的负力孔5.4做摆动负功运动,再带动加组交叉杠杆1做摆动运动;压撬杆4和加组交叉杠杆1做合拢到张开摆动运动,也带动了一串交叉杠杆20做伸缩来复负功运动,使末端连杆2的连孔2.3 也做来复负功运动,而且末端连杆2的连孔2.3做的来复负功运动的负功距离长于短弯杠杆5的负力孔5.4做的摆动负功运动的负功距离,也就是末端连杆2 的连孔2.3做的来复负功运动变相地代替了短弯杠杆5的负力孔5.4做的摆动负功运动,末端连杆2的连孔2.3做的来复负功运动的长负功距离变相地代替了短弯杠杆5的负力孔5.4做的摆动负功运动的短负功距离,也就变相地增大了短弯杠杆5的负力孔5.4做的负功量,除于做负功时间,也就变相地增大了短弯杠杆 5的负力孔5.4做的负功率,反过来也变相地增大了主力源直行电机21的主力功率。第一机23再带动与第一机23的末端连杆2的连孔2.3连接的第二机25 的长弯杠杆6的主力孔6.3做摆动运动,带动长弯杠杆6做摆动运动,再带动第二机25的末端连杆2的连孔2.3做来复负功运动,再带动与第二机25的末端连杆2的连孔2.3连接的第三机26的侧偏移位杠杆7的主力孔7.3做摆动运动,也带动了第三机26的末端连杆2的连孔2.3做来复负功运动,再带动与第三机 26的末端连杆2的连孔2.3连接的第四机27的长弯杠杆6的主力孔6.3做摆动运动,也带动第四机27的末端连杆2的连孔2.3做来复负功运动,再带动与第四机27的末端连杆2的连孔2.3连接的大杠杆10的主力孔10.3做摆动运动,也带动大杠杆10的负力孔10.4做负功摆动运动,再带动与大杠杆10的负力孔 10.4连接的推杆11的上孔11.1做来复运动,也带动推杆11做来复运动;推杆 11再带动与推杆11的拉孔11.3连接的拉杆12的上孔12.1做来复运动,也带动拉杆12做来复运动。推杆11再带动与推杆11的下孔11.2连接的主动右端棘齿轮14的杠杆14.2端头的推孔14.3做摆动运动,也带动主动右端棘齿轮做摆动运动;拉杆12再带动与拉杆12的下孔12.2连接的主动左端棘齿轮13的杠杆 13.2端头的拉孔13.3做摆动运动,也带动主动左端棘齿轮做摆动运动。主动右端棘齿轮和主动左端棘齿轮做摆动运动,互相作替换地带动从动左右端棘齿轮内花键套旋转输出动力。由于第一机、第二机、第三机、第四机串联做负功运动,致使第四机27的末端连杆2的连孔2.3更大地增加了做来复负功运动的负功量和负功率,远远大于主力源直行电机21的主
动功和主动功率。
82.串联交叉杠杆增长杠杆负力臂负力功距的主动力功率增大机不能使用曲轴作为终端传力机构,如使用曲轴作为终端传机构,在运作中,一但机器突然坏了,停止运作,那么在惯性作用下,串联交叉杠杆运作在象图33串联交叉杠杆伸延出去那样,这时串联交叉杠杆就收不缩回来了,串联交叉杠杆顶力很大,通过传力机构(如连杆)串联交叉杠杆会把曲轴顶得死死的,不能动,在惯性作用下曲轴会压坏串联交叉杠杆,用在公路车辆上,会造成突然停车或造成交通事故,如追尾。只能用端棘齿轮作为终端传力机构。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1