搭载核电厂海生物监测设备的智能升降装置的制作方法
1.本发明属于核电技术领域,更具体地说,本发明涉及一种搭载核电厂海生物监测设备的智能升降装置。
背景技术:
2.核电厂运行过程中需要大量的冷却水,因此,核电基地一般都选择在滨海区域建设,以方便采用海水作为机组的冷却水。近海水域的生态环境变化会影响核电机组的运行,海水富营养化、海洋环境急剧变化会导致海洋生物集群暴发,堵塞滤网影响核电厂取水,严重时会造成核电厂紧急停堆或降功率运行,带来巨大的经济损失。此外,周边海域环境综合管理可能滞后于核电发展,冷源取水安全面临很大挑战,影响核电安全。
3.一般滨海核电厂循环水过滤系统的处理过程为:海水通过取水口进入取水渠,进入联合泵房后依次经过粗滤栅、细格栅和鼓型旋转滤网过滤后进入重要厂用水泵和循环水泵吸入口。根据核电厂实际运行情况来看,循环水过滤系统并不能对所有的致灾物种类和致灾物量级产生有效的防护,已经出现核电基地因为致灾物入侵导致停机和停堆事件,严重影响核电厂的安全可靠运行和经济效益。
4.目前,部分核电厂逐渐开始在循环水过滤系统前增设循环水监测与预过滤系统(cfs),覆盖取水口到取水泵房的前池的取水流道,对机组所使用的全部海水进行预过滤和防护,主要防护对象为厂址及临近海域已发生和潜在发生的致灾海生物和漂浮物。循环水监测与预过滤系统的前端监测预警对核电厂冷源取水口致灾物进行监测并起到一定预警功能,对于致灾物的监测关键在于加强入侵物的特征的探测,并选择合适的监测手段,监测手段包括声呐、原位成像仪、摄像头、卫星遥感、雷达、海水理化特性传感器等。声呐、原位成像仪、水下摄像机等海生物和其他冷源致灾物的监测设备,需要在取水口、取水流道、网兜及拦污网前后水下多处进行设置,以达到监测预警的功能,升降装置作为可搭载冷源致灾物监测设备的装置,其应用效果也显得格外重要。
5.现有的升降装置应用范围广,在正常运行时,海生物监测设备由升降装置控制,停留在水面下某一固定位置,在必要时升降装置才会自动将海生物监测设备升降至需要的位置进行监测,监测完成后返回固定位置。在升降装置安装平台的附近设置一个小型转接箱,用来布放升降装置、原位成像仪和水下摄像头等海生物监测设备的非水下相关设备(如光电转换器/电源转换器),同时用来信号转接和配电。升降装置转接箱至设备吊篮间配有综合电缆,能够集成原位成像仪、水下摄像头、补光灯等海生物监测设备的供电和信号电缆,以及智能升降装置的控制电缆,设备吊篮固定在智能伸缩支架二级伸缩节下方。
6.但是,相关技术中的升降装置至少存在以下缺陷:
7.1)核电厂冷源监测位置的介质为海水,升降杆的部分伸缩杆和吊篮长期沉浸在海水水下,容易发生锈蚀问题,影响升降装置的使用寿命。
8.2)升降杆下部伸缩杆长期浸没在海水水下,海生物容易附着在水下伸缩节的表面,升降装置进行升降调节时,附着在伸缩杆上的海生物会导致伸缩节卡涩、损坏。
9.3)升降装置承载的声呐、视频探测等海生物监测设备有其专有的特性原理,如果监测设备放置的位置不当,即升降装置没有将承载的海生物监测设备放置在恰当的位置,则监测设备将无法准确探测冷源致灾物,达不到监测预警的效果。相关技术的升降装置中,因液位计安装困难,海水液位无法准确测量,导致升降装置无法准确定位,无法将监测设备放置在准确的海水下某一高度。
10.4)实际使用过程中,海藻类浮游生物浮在海平面上,部分鱼虾类海洋生物从水下通过,笔帽螺类海洋生物则从海底通过。因此,根据不同时期的海生物暴发的特点,升降装置需要做到从海底到海平面的全断面监测。相关技术中,升降装置升降杆的伸缩节伸缩范围较小,无法做到海平面到海底的全断面监测。
11.5)升降装置安装完成后,所承载的海生物监测设备固定在升降装置的设备吊篮内,一经安装完成,其监测角度和方向就无法调整。如果安装完成后在使用过程中发现监测设备的监测角度选择不当,无法达到监测效果,则需要对监测设备进行重新拆装,费时费力。
12.6)升降装置设备吊篮及其承载的海生物监测设备的维修非常不便,需要维修人员通过船只接近升降装置设备吊篮,并通过不断调节船只的角度和方向才能清洁和维修吊篮以及吊篮内的设备。由于船只无法稳定固定,在海平面上会随着波浪摆动或晃动,增加了维修的难度。
技术实现要素:
13.本发明的目的在于:克服现有技术的至少一个缺陷,提供一种具有理想使用寿命的搭载核电厂海生物监测设备的智能升降装置。
14.为了实现上述目的,本发明提供一种搭载核电厂海生物监测设备的智能升降装置,其包括:
15.安装平台,所述安装平台上设有驱动机构;以及
16.升降杆,包括安装于所述安装平台上的固定杆和可相对于所述固定杆伸缩的伸缩杆,所述驱动机构驱动所述伸缩杆相对于所述安装平台伸缩,所述升降杆的末端设有吊篮;
17.其中,所述升降杆和/或所述吊篮与接触海水的部分设有牺牲阳极。
18.根据本发明搭载核电厂海生物监测设备的智能升降装置的一个实施方式,围绕所述伸缩杆的水下部分设有海生物自动去除装置,所述伸缩杆自动收缩时,所述海生物自动去除装置自动去除所述伸缩杆上附着的海生物。
19.根据本发明搭载核电厂海生物监测设备的智能升降装置的一个实施方式,所述伸缩杆的水下部分设有两级方形杆柱,围绕所述两级方形杆柱分别设有四片刮刀装置,所述刮刀装置在所述伸缩杆进行自动收缩时自动去除所述伸缩杆上附着的海生物。
20.根据本发明搭载核电厂海生物监测设备的智能升降装置的一个实施方式,所述两级方形杆柱与所述刮刀装置之间留有3-5mm的间隙。
21.根据本发明搭载核电厂海生物监测设备的智能升降装置的一个实施方式,所述驱动机构与所述伸缩杆之间设有链条,所述链条上设有链条编码器,通过所述链条编码器计算出链条放出的长度或者收起的长度,根据智能升降装置与海平面的距离计算所述吊篮与海平面之间的距离。
22.根据本发明搭载核电厂海生物监测设备的智能升降装置的一个实施方式,所述吊篮底部至海平面之间的距离按照以下公式计算:
23.h1=h3+h1-h0-h2
24.其中,h1为海平面至吊篮底部距离,h3为升降装置安装平台至吊篮底部距离,h1为链条的实际长度,h0为伸缩杆全部缩回时链条的长度,h2为升降装置安装平台到海平面的距离,由导播雷达液位计测量得出。
25.根据本发明搭载核电厂海生物监测设备的智能升降装置的一个实施方式,所述伸缩杆为四级伸缩杆。
26.根据本发明搭载核电厂海生物监测设备的智能升降装置的一个实施方式,所述智能升降装置与所述吊篮的连接处设有吊篮机械锁紧装置,所述吊篮机械锁紧装置锁紧时,所述吊篮固定,所述吊篮机械锁紧装置开启后,所述吊篮能够进行水平
±
90
°
旋转。
27.根据本发明搭载核电厂海生物监测设备的智能升降装置的一个实施方式,所述智能升降装置在所述升降杆收缩后所述吊篮停留的位置设有检修平台。
28.根据本发明搭载核电厂海生物监测设备的智能升降装置的一个实施方式,所述吊篮中设有声呐、原位成像仪、视频探测设备中的一种或多种。
29.根据本发明搭载核电厂海生物监测设备的智能升降装置的一个实施方式,所述牺牲阳极为与所述升降杆和/或所述吊篮连接的铝、镁或锌。
30.相对于现有技术,本发明搭载核电厂海生物监测设备的智能升降装置中,升降杆和/或吊篮与接触海水的部分设有牺牲阳极,无需外加电源即可解决智能升降装置水下部分的长期海水腐蚀问题,可以实现通过较低的制造成本延长升降杆和吊篮的使用寿命。
附图说明
31.下面结合附图和具体实施方式,对本发明搭载核电厂海生物监测设备的智能升降装置进行详细说明。
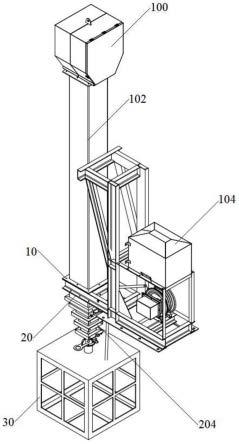
32.图1为本发明搭载核电厂海生物监测设备的智能升降装置的立体结构示意图。
33.图2为本发明搭载核电厂海生物监测设备的智能升降装置中,海生物自动去除装置的结构示意图。
34.图3为本发明搭载核电厂海生物监测设备的智能升降装置中,从海平面至设备吊篮底部距离的计算示意图。
35.其中,
36.10
‑‑
安装平台;100
‑‑
驱动机构;102
‑‑
链条编码器;104
‑‑
控制箱;20
‑‑
升降杆;200
‑‑
固定杆;202
‑‑
伸缩杆;204
‑‑
刮刀装置;30
‑‑
吊篮;300
‑‑
吊篮机械锁紧装置。
具体实施方式
37.为了使本发明的发明目的、技术方案和技术效果更加清晰明白,以下结合附图和具体实施方式,对本发明进行进一步详细说明。应当理解的是,本说明书中描述的具体实施方式仅仅是为了解释本发明,并不是为了限定本发明。
38.请参照图1所示,本发明公开了一种搭载核电厂海生物监测设备的智能升降装置,其包括:
39.安装平台10,安装平台10上设有驱动机构100(如提升电动机构);以及
40.升降杆20,包括安装于安装平台10上的固定杆200和可相对于固定杆200伸缩的伸缩杆202,驱动机构100驱动伸缩杆202相对于安装平台10伸缩,升降杆20的末端设有吊篮30;
41.其中,升降杆20和/或吊篮30与接触海水的部分设有牺牲阳极(未图示)。
42.阴极保护系统作为一种防腐蚀手段,其原理是向被腐蚀金属结构物表面施加一个外加电流,让被保护结构成为阴极,从而使得金属腐蚀发生的电子迁移得到抑制,避免或减弱腐蚀的发生。牺牲阳极的阴极保护就是将电位更负的金属如铝、锌或镁与被保护的金属连接,并处于同一电解质中,该金属上的电子就会转移到被保护金属上去,从而使整个被保护金属处于一个较负的相同的电位下。该方式简便易行,不需要外加电源,很少产生腐蚀干扰。本发明智能升降装置,利用上述牺牲阳极保护的原理,将接触海水的升降杆20和吊篮30设置牺牲阳极,可以实现用较低的制造成本延长了升降杆20和吊篮30的使用寿命。
43.智能升降装置水下部分容易出现海生物附着问题,升降杆20上附着的海生物如果不清理,在升降杆20接收到自动指令进行收缩时,伸缩杆202上附着的海生物就容易卡在伸缩杆202的缝隙中,导致伸缩杆202卡涩从而造成升降装置损坏。相关技术一般采用人工去除海生物的方法或定时加药杀死海生物的方法去除升降装置水下的附着物:人工去除需要用船只将工人运送到升降机附近,由工人进行水上作业;定时加药的设备和药物的成本较高,效果不好并且会对生态环境造成影响。海生物的附着无法进行人为控制,也可能出现人工去除或加药不久,马上又出现海生物附着的情况,人工清理和加药的频率无法进行预估。在升降杆202收缩前,为了防止升降杆202卡涩损坏都应进行一次海生物清理,如此导致清理频率太高,人力投入和成本投入大幅增加。
44.请参照图2所示,本发明智能升降装置设有刮刀式的海生物自动去除装置,在升降杆202进行自动收缩时,刮刀装置204会自动去除升降杆202上附着的海生物。海生物自动去除装置设置在智能升降装置升降杆20水下部分的两级伸缩杆202的方形杆柱上。在方形的伸缩杆202柱上,环抱伸缩杆202设置4片刮刀装置204,每一个边长设置一片,刮刀装置204末端紧贴伸缩杆202,但与伸缩杆202留有大约3-5mm左右的间隙,以保证自动去除装置工作时不会刮伤伸缩杆202。两节水下伸缩杆202各设置4片刮刀装置204,共设置8片。
45.当伸缩杆202伸长时,刮刀装置204固定在伸缩杆202根部,靠近固定杆200的刮刀装置204不动,最下面的刮刀装置204随着伸缩杆202的伸长向下移动,两节刮刀装置204将会自动去除环抱在方形伸缩杆202上的附着物。当伸缩杆202收缩时,刮刀装置204也会同步刮除附着在方形伸缩杆202上的海生物。升降杆20伸缩的同时刮除附着物,不需要人工干预,只要伸缩杆202动作即可自动进行刮除,不仅高效、及时、环保、成本低,且不需要人工干预,成功地降低伸缩杆202由于海生物的附着而导致的卡涩、卡死等问题的发生率。
46.升降装置安装平台10到海平面的距离可通过安装导播雷达液位计来测量,由于吊篮30的位置不固定,从海平面到吊篮30的距离的测量通过安装仪表等常规测量方式较难实现。只有精确测量从海平面到吊篮30的距离,将吊篮30放置在合适的水下高度,才能保证声呐、原位测量仪等设备正常工作。
47.请参照图3所示,本发明提供了一套简易有效的升降装置用海水液位测量方法,原理如下:驱动机构100与伸缩杆202之间设有链条,当驱动机构100带动伸缩杆202伸缩时,链
条会根据伸缩杆202的伸缩距离进行收放。在链条处增加链条编码器102,通过链条编码器102计算出链条放出的长度或者收起的长度,再与智能升降装置与海平面的距离进行计算,就可得出从海平面到设备吊篮的距离。
48.请继续参照图3所示,假设从智能升降装置安装平台10到吊篮30底部的距离为h,从智能升降装置安装平台10至海平面的距离为h2,从海平面至吊篮30底部的距离为h1,则h1=h-h2。
49.当伸缩杆202收缩至最短距离时,记录链条的长度为初始长度h0,记录从安装平台10到吊篮30底部的距离为h3(h3的具体长度由智能升降装置厂家具体确定,为某一确定值,智能升降装置出厂时已确定),当伸缩杆202伸长到某一距离时,由链条编码器102计算出链条的长度为h1,伸缩杆202伸长的距离则为h1-h0。
50.智能升降装置至吊篮30底部的距离计算公式为:h=h3+h1-h0,其中,h2由导播雷达液位计测量得出,从海平面至设备吊篮底部的距离:h1=h-h2=h3+h1-h0-h2,其中,h1:海平面至吊篮30底部距离;h3:升降装置安装平带10至吊篮30底部距离;h1:链条的实际长度;h0:伸缩杆202全部缩回时链条的长度;h2:升降装置安装平台10到海平面的距离。
51.相关技术中,由于智能升降装置只有两级可伸缩的伸缩杆,其他都为固定杆,伸缩节伸缩范围较小,无法做到海平面到海底的全断面监测,导致存在监测盲区。请继续参照图1所示,本发明搭载核电厂海生物监测设备的智能升降装置设置了四级可伸缩的升降杆20,使升降杆20可伸缩的范围进一步扩大,升降装置深入海水中的深度大大延长,可将吊篮30停留于海底上0.3米(防止设备吊篮触底)的位置,吊篮30内放置的声纳、原位成像仪、水下摄像头等可以实现从水面下至水底全断面的监测,减少了监测盲区。
52.请参照图3,为解决智能升降装置吊篮30内的海生物监测设备一经安装完成无法进行监测设备角度调校,以及设备的清洁维修和更换困难等问题,智能升降装置与吊篮30的连接处设有吊篮机械锁紧装置300。正常运行工况下,使用机械锁紧装置300对吊篮30进行锁紧,吊篮30就固定在某一方位,海生物监测设备固定在某一角度进行监测。如果在运行过程中,发现监测设备的监测位置存在监测盲区,或者角度无法监测出海水中海生物的实际密度,则可以打开机械锁紧装置300,使吊篮进行水平
±
90
°
旋转,以找到最佳的监测角度。当需要进行设备清洁维修和更换时,如果设备吊篮出口没有正对检修平台,可以打开机械锁紧装置300,使吊篮30进行水平旋转,以便于设备清洁维修和更换。
53.相关技术中,智能升降装置设备吊篮及其承载的海生物监测设备的维修非常不便,需要维修人员通过船只接近设备吊篮,并通过不断调节船只的角度和方向,方能在船只不停晃动的恶劣条件下完成吊篮内设备的维修和清洁。为解决维修和清洁困难的问题,本发明搭载核电厂海生物监测设备的智能升降装置中,在升降装置升降杆20收缩后吊篮30停留的位置设置检修平台(未图示),检修人员直接通过人员通道进入检修平台进行设备检修,消除了原来需要坐船检修设备的不便。
54.结合以上对本发明搭载核电厂海生物监测设备的智能升降装置的详细描述可以看出,相对于现有技术,本发明搭载核电厂海生物监测设备的智能升降装置至少具有以下优点:
55.1)本发明搭载核电厂海生物监测设备的智能升降装置利用牺牲阳极保护的原理,将接触海水的升降杆20和吊篮30设置牺牲阳极,可以实现用较低的制造成本延长了升降杆
20和吊篮30的使用寿命。
56.2)本发明搭载核电厂海生物监测设备的智能升降装置中,环抱伸缩杆202设置4片刮刀装置204,刮刀装置204随着伸缩杆202的伸长向下移动,刮刀装置204将会自动去除环抱在方形伸缩杆202上的附着物,因此可有效并长期解决了海生物附着在伸缩节上的问题,从而大大减少伸缩节卡涩损坏的概率。
57.3)本发明搭载核电厂海生物监测设备的智能升降装置解决了海水液位测量难度较高、安装液位计不方便,测量液位不准的问题,升降装置根据得到的准确海水水位,可以对吊篮30进行精确定位,从而将海生物监测设备放置在准确的高度,以达到更好的监测效果。
58.4)本发明搭载核电厂海生物监测设备的智能升降装置设置了机械锁紧装置300,解决了智能升降装置及安装在吊篮30内的海生物监测设备一经安装完成,除非重新安装,否则无法进行监测设备角度和方向调校的问题,也为设备的清洁维修和更换提供了方便。
59.5)本发明搭载核电厂海生物监测设备的智能升降装置在升降装置升降杆20收缩后吊篮30停留的位置设置检修平台,解决了智能升降装置吊篮30及其承载的监测设备的维修不便的问题,显著减少了维修成本。
60.根据上述原理,本发明还可以对上述实施方式进行适当的变更和修改。因此,本发明并不局限于上面揭示和描述的具体实施方式,对本发明的一些修改和变更也应当落入本发明的权利要求的保护范围内。此外,尽管本说明书中使用了一些特定的术语,但这些术语只是为了方便说明,并不对本发明构成任何限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1