一种智慧工地监控系统的制作方法
1.本发明涉及监控技术领域,特别是一种智慧工地监控系统。
背景技术:
2.在监控的使用过程中,经常需要调整监控摄像头的方向和角度,一般需要使用多个电机来分别调整,如果可以减少电机的使用,甚至在只用一个电机,就能完成调整监控摄像头的方向和角度的话,可以省下不少资源,提高资源的利用率,减少浪费和成本。
技术实现要素:
3.本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
4.鉴于上述和/或现有的监控系统中存在的问题,提出了本发明。
5.因此,本发明所要解决的问题在于如何使用一个电机就能控制监控摄像头的方向和角度。
6.为解决上述技术问题,本发明提供如下技术方案:一种智慧工地监控系统,其中有输出组件、调节组件和控制组件。
7.作为本发明所述智慧工地监控系统的一种优选方案,其中:输出组件,包括固定板、电机、传动轴、一号棘轮件和二号棘轮件,所述电机设置于所述固定板底部一侧,所述传动轴一端连接所述电机,所述一号棘轮件设置于所述传动轴中部偏上,所述二号棘轮件设置于所述传动轴中部偏下;
8.调节组件,设置于所述输出组件底部,包括固定轴、一号限位杆、二号限位框、方向齿轮和角度齿轮,所述固定轴设置于所述固定板底部中心,所述一号限位杆设置于所述固定轴底部,所述二号限位框设置于所述一号限位杆一侧,所述方向齿轮设置于所述一号限位杆一端顶部,所述角度齿轮底部和所述二号限位框配合;以及,
9.控制组件,和所述输出组件电性连接,包括监控器、控制中心、控制总线和数据总线,所述监控器设置于所述调节组件底部,所述控制中心通过所述控制总线和所述数据总线与所述监控器电性连接。
10.作为本发明所述智慧工地监控系统的一种优选方案,其中:所述电机顶部和所述固定板固定连接,所述电机底部和所述传动轴转动连接,所述输出组件还包括一号齿轮和二号齿轮,所述一号齿轮固定设置于所述传动轴中部偏上,所述二号齿轮固定设置于所述传动轴中部偏下。
11.作为本发明所述智慧工地监控系统的一种优选方案,其中:所述一号棘轮件包括一号棘轮壳、一号棘轮盘、一号棘轮柱、一号棘轮爪和一号棘轮弹簧,所述一号棘轮壳套接于所述传动轴外部,所述一号棘轮盘固定设置于所述一号棘轮壳底部,所述一号棘轮柱均匀环绕设置于所述一号棘轮盘侧边顶部,所述一号棘轮爪套接于所述一号棘轮柱外部,所
述一号棘轮弹簧连接所述一号棘轮壳和所述一号棘轮爪,所述一号齿轮和所述一号棘轮爪配合。
12.作为本发明所述智慧工地监控系统的一种优选方案,其中:所述二号棘轮件包括二号棘轮壳、二号棘轮盘、二号棘轮柱、二号棘轮爪和二号棘轮弹簧,所述二号棘轮壳套接于所述传动轴外部,所述二号棘轮壳设置于所述一号棘轮件底部,所述二号棘轮盘固定设置于所述二号棘轮壳顶部,所述二号棘轮柱均匀环绕设置于所述二号棘轮盘侧边底部,所述二号棘轮爪套接于所述二号棘轮柱外部,所述二号棘轮弹簧连接所述二号棘轮壳和所述二号棘轮爪,所述二号齿轮和所述二号棘轮爪配合。
13.作为本发明所述智慧工地监控系统的一种优选方案,其中:所述一号限位杆有多件,均匀环绕设置于所述固定轴底部,所述二号限位框数量和所述一号限位杆相同,所述二号限位框一侧设有缺口,缺口顶部和所述一号限位杆近末端固定连接,缺口底部和所述角度齿轮底部配合。
14.作为本发明所述智慧工地监控系统的一种优选方案,其中:所述方向齿轮侧边设置于所述一号限位杆末端顶部,所述调节组件还包括固定块和三号齿轮,所述固定块设置于所述方向齿轮一侧底部,所述三号齿轮设置于所述固定块一侧,所述方向齿轮和所述一号齿轮配合。
15.作为本发明所述智慧工地监控系统的一种优选方案,其中:所述角度齿轮包括横齿、竖齿和环槽,所述横齿设置于所述角度齿轮侧边,所述横齿和所述二号齿轮配合,所述竖齿设置于所述角度齿轮顶部,所述竖齿和所述三号齿轮配合,所述环槽设置于所述角度齿轮底部,所述环槽和缺口配合。
16.作为本发明所述智慧工地监控系统的一种优选方案,其中:所述调节组件还包括四连杆和连接杆,所述四连杆包括固定杆、旋转杆、传动杆和摆动杆,所述连接杆一端贯穿转动连接所述固定块并和所述三号齿轮固定连接,所述连接杆另一端贯穿转动连接所述固定杆并和所述旋转杆固定连接。
17.作为本发明所述智慧工地监控系统的一种优选方案,其中:所述监控器和所述摆动杆配合,所述监控器与所述数据总线相连,所述监控器与所述控制总线相连。
18.作为本发明所述智慧工地监控系统的一种优选方案,其中:所述控制中心和所述数据总线相连,所述控制总线和所述数据总线相连。
19.本发明有益效果为:本发明在输出组件、调节组件和控制组件的配合下,能在仅仅使用一个电机的情况下控制监控摄像头的方向和角度,可以省下不少资源,提高资源的利用率,减少浪费和成本。
附图说明
20.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。其中:
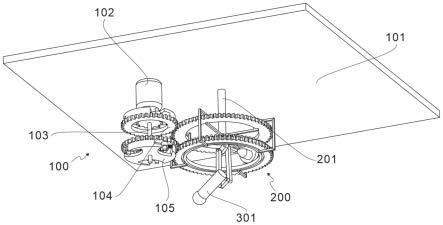
21.图1为智慧工地监控系统的整体结构图。
22.图2为智慧工地监控系统的输出组件部分结构图。
23.图3为智慧工地监控系统的输出组件底部视角图。
24.图4为智慧工地监控系统的输出组件顶部视角图。
25.图5为智慧工地监控系统的调节组件底部视角图。
26.图6为智慧工地监控系统的调节组件顶部视角图。
27.图7为智慧工地监控系统的控制组件示意图。
具体实施方式
28.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合说明书附图对本发明的具体实施方式做详细的说明。
29.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明还可以采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似推广,因此本发明不受下面公开的具体实施例的限制。
30.其次,此处所称的“一个实施例”或“实施例”是指可包含于本发明至少一个实现方式中的特定特征、结构或特性。在本说明书中不同地方出现的“在一个实施例中”并非均指同一个实施例,也不是单独的或选择性的与其他实施例互相排斥的实施例。
31.实施例1
32.参照图1~7,为本发明第一个实施例,该实施例提供了一种智慧工地监控系统,智慧工地监控系统包括输出组件100、调节组件200和控制组件300。
33.具体的,输出组件100,包括固定板101、电机102、传动轴103、一号棘轮件104和二号棘轮件105,电机102设置于固定板101底部一侧,传动轴103一端连接电机102,一号棘轮件104设置于传动轴103中部偏上,二号棘轮件105设置于传动轴103中部偏下。
34.输出组件100用来输出动力,调整监控摄像头的方向和角度。
35.由于两个棘轮件的存在,当电机102带动传动轴103旋转时,正转和反转分别只能带动一个棘轮件旋转,这就保证了正转和反转输出不同的调节方式。
36.具体的,调节组件200,设置于输出组件100底部,包括固定轴201、一号限位杆202、二号限位框203、方向齿轮204和角度齿轮205,固定轴201设置于固定板101底部中心,一号限位杆202设置于固定轴201底部,二号限位框203设置于一号限位杆202一侧,方向齿轮204设置于一号限位杆202一端顶部,角度齿轮205底部和二号限位框203配合。
37.调节组件200用来在输出组件100的带动下,调整监控摄像头的方向和角度。
38.方向齿轮204被带动旋转时,调节监控摄像头指向的东南西北方位,角度齿轮205被带动旋转时,调节监控摄像头和水平面的夹角。
39.具体的,控制组件300,和输出组件100电性连接,包括监控器301、控制中心302、控制总线303和数据总线304,监控器301设置于调节组件200底部,控制中心302通过控制总线303和数据总线304与监控器301电性连接。
40.控制组件300用来输出控制信号并接受监控信号。
41.在使用时,输出组件100用来输出动力,调整监控摄像头的方向和角度。由于两个棘轮件的存在,当电机102带动传动轴103旋转时,正转和反转分别只能带动一个棘轮件旋转,这就保证了正转和反转输出不同的调节方式。输出组件100用来输出动力,调整监控摄像头的方向和角度。由于两个棘轮件的存在,当电机102带动传动轴103旋转时,正转和反转
分别只能带动一个棘轮件旋转,这就保证了正转和反转输出不同的调节方式。控制组件300用来输出控制信号并接受监控信号。
42.实施例2
43.参照图1~7,为本发明第二个实施例,该实施例基于上一个实施例。
44.具体的,电机102顶部和固定板101固定连接,电机102底部和传动轴103转动连接,输出组件100还包括一号齿轮106和二号齿轮107,一号齿轮106固定设置于传动轴103中部偏上,二号齿轮107固定设置于传动轴103中部偏下。
45.电机102转动会带动一号齿轮106和二号齿轮107转动。
46.具体的,一号棘轮件104包括一号棘轮壳104a、一号棘轮盘104b、一号棘轮柱104c、一号棘轮爪104d和一号棘轮弹簧104e,一号棘轮壳104a套接于传动轴103外部,一号棘轮盘104b固定设置于一号棘轮壳104a底部,一号棘轮柱104c均匀环绕设置于一号棘轮盘104b侧边顶部,一号棘轮爪104d套接于一号棘轮柱104c外部,一号棘轮弹簧104e连接一号棘轮壳104a和一号棘轮爪104d,一号齿轮106和一号棘轮爪104d配合。
47.从顶部向下看,一号齿轮106顺时针旋转时,会接触一号棘轮爪104d的侧面,一号棘轮弹簧104e收缩,一号棘轮件104不会跟着旋转,一号齿轮106逆时针旋转时,会接触一号棘轮爪104d的正面,一号棘轮件104跟着旋转。
48.具体的,二号棘轮件105包括二号棘轮壳105a、二号棘轮盘105b、二号棘轮柱105c、二号棘轮爪105d和二号棘轮弹簧105e,二号棘轮壳105a套接于传动轴103外部,二号棘轮壳105a设置于一号棘轮件104底部,二号棘轮盘105b固定设置于二号棘轮壳105a顶部,二号棘轮柱105c均匀环绕设置于二号棘轮盘105b侧边底部,二号棘轮爪105d套接于二号棘轮柱105c外部,二号棘轮弹簧105e连接二号棘轮壳105a和二号棘轮爪105d,二号齿轮107和二号棘轮爪105d配合。
49.二号棘轮件105和一号棘轮件104类似但反向设置,二号齿轮107顺时针旋转时二号棘轮件105才会跟着旋转。这就保证了电机102旋转时有且只有一个棘轮件跟着转,电机102旋转方向不同,跟着转的棘轮件也不同。
50.具体的,一号限位杆202有多件,均匀环绕设置于固定轴201底部,二号限位框203数量和一号限位杆202相同,二号限位框203一侧设有缺口,缺口顶部和一号限位杆202近末端固定连接,缺口底部和角度齿轮205底部配合。
51.一号限位杆202和二号限位框203支撑着方向齿轮204,二号限位框203支撑着角度齿轮205。
52.具体的,方向齿轮204侧边设置于一号限位杆202末端顶部,调节组件200还包括固定块206和三号齿轮208,固定块206设置于方向齿轮204一侧底部,三号齿轮208设置于固定块206一侧,方向齿轮204和一号齿轮106配合。
53.一号齿轮106旋转会带动方向齿轮204旋转,调整监控摄像头的方向,同时因为三号齿轮208的存在,还会调整监控摄像头的角度,因此使用时要先调整方向,再调整角度。
54.具体的,角度齿轮205包括横齿205a、竖齿205b和环槽h1,横齿205a设置于角度齿轮205侧边,横齿205a和二号齿轮107配合,竖齿205b设置于角度齿轮205顶部,竖齿205b和三号齿轮208配合,环槽h1设置于角度齿轮205底部,环槽h1和缺口配合。
55.二号齿轮107转动带动横齿205a转动,横齿205a转动带动竖齿205b转动,竖齿205b
转动带动三号齿轮208转动,三号齿轮208转动调整监控摄像头的角度。
56.具体的,调节组件200还包括四连杆209和连接杆207,四连杆209包括固定杆209a、旋转杆209b、传动杆209c和摆动杆209d,连接杆207一端贯穿转动连接固定块206并和三号齿轮208固定连接,连接杆207另一端贯穿转动连接固定杆209a并和旋转杆209b固定连接。
57.当三号齿轮208旋转时,带动连接杆207转动,连接杆207转动带动旋转杆209b旋转,由于四连杆209的四个杆长度不一,旋转杆209b旋转会带动摆动杆209d来回摆动,在监控器301的重力作用下,监控器301调整角度时,四连杆209的固定杆209a和传动杆209c基本保持竖直。
58.在使用时,输出组件100用来输出动力,调整监控摄像头的方向和角度。由于两个棘轮件的存在,当电机102带动传动轴103旋转时,正转和反转分别只能带动一个棘轮件旋转,这就保证了正转和反转输出不同的调节方式。输出组件100用来输出动力,调整监控摄像头的方向和角度。由于两个棘轮件的存在,当电机102带动传动轴103旋转时,正转和反转分别只能带动一个棘轮件旋转,这就保证了正转和反转输出不同的调节方式。控制组件300用来输出控制信号并接受监控信号。
59.电机102转动会带动一号齿轮106和二号齿轮107转动。从顶部向下看,一号齿轮106顺时针旋转时,会接触一号棘轮爪104d的侧面,一号棘轮弹簧104e收缩,一号棘轮件104不会跟着旋转,一号齿轮106逆时针旋转时,会接触一号棘轮爪104d的正面,一号棘轮件104跟着旋转。二号棘轮件105和一号棘轮件104类似但反向设置,二号齿轮107顺时针旋转时二号棘轮件105才会跟着旋转。这就保证了电机102旋转时有且只有一个棘轮件跟着转,电机102旋转方向不同,跟着转的棘轮件也不同。一号限位杆202和二号限位框203支撑着方向齿轮204,二号限位框203支撑着角度齿轮205。一号齿轮106旋转会带动方向齿轮204旋转,调整监控摄像头的方向,同时因为三号齿轮208的存在,还会调整监控摄像头的角度,因此使用时要先调整方向,再调整角度。二号齿轮107转动带动横齿205a转动,横齿205a转动带动竖齿205b转动,竖齿205b转动带动三号齿轮208转动,三号齿轮208转动调整监控摄像头的角度。当三号齿轮208旋转时,带动连接杆207转动,连接杆207转动带动旋转杆209b旋转,由于四连杆209的四个杆长度不一,旋转杆209b旋转会带动摆动杆209d来回摆动,在监控器301的重力作用下,监控器301调整角度时,四连杆209的固定杆209a和传动杆209c基本保持竖直。
60.实施例3
61.参照图1~7,为本发明第三个实施例,该实施例基于前两个实施例。
62.具体的,监控器301和摆动杆209d配合,监控器301与数据总线304相连,监控器301与控制总线303相连。
63.监控器301用于监控,并将采集到的监控信息发送至数据总线304。
64.具体的,控制中心302和数据总线304相连,控制总线303和数据总线304相连。
65.控制中心302,与控制总线303相连,输出控制信号,也和数据总线304相连,获取监控器301收集到的信息。
66.在使用时,通过控制中心302查看监控器301传来的画面,判断监控器301的方向和角度,并先让电机102逆时针旋转,调整监控器301对准的方位,再让电机102顺时针旋转,调整监控器301对准的角度,此顺序不可颠倒。
67.应说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精神和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1