固定井壁升降式潜望镜的制作方法
1.本发明涉及潜望镜领域,特别涉及一种固定井壁升降式潜望镜。
背景技术:
2.城市最重要的是一个城市的下水道如何保持畅通,在雨季来临的时候如何不产生积水。
3.智慧城市最重要的是智能化的检测,前期预判,前期检测、前期维护,只有这样一个城市才能不为下水道困扰,真正实现海绵城市、智慧城市的目标。
4.在一个下水道水位产生变化,需要检测的时候目前是需要人为打开井盖,然后通过管道爬行机器人、潜望镜进行检测,这样产生人力物力的资源,这个不是智慧城市的发展方向。
技术实现要素:
5.本发明的目的在于提供一种固定井壁升降式潜望镜,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:一种固定井壁升降式潜望镜,包括:
7.井壁,所述井壁的内部设置有潜望镜主体,所述潜望镜主体用于对下水道内部情况进行监视,所述井壁内壁的顶部固定连接有控制箱体;
8.两个固定块,所述固定块转动连接于井壁内壁的一侧,所述固定块的底部固定连接有支撑滑杆;
9.旋转组件,其设置于潜望镜主体和支撑滑杆之间,所述旋转组件用于带动潜望镜主体进行角度调节;
10.升降组件,其用于带动旋转组件和潜望镜主体上下运动。
11.优选的,所述旋转组件包括两个滑块,所述滑块与支撑滑杆滑动穿插套接,两个所述滑块之间活动安装连接有安装轴,这样可以保证潜望镜主体一直处于垂直向下的姿态,所述安装轴的外壁转动穿插套接有承载支架,所述承载支架的顶部固定有控制盒,控制盒里面连接有第二电机与集电滑环。
12.优选的,所述第二电机的输出端传动连接有传动轴,所述传动轴的底部固定连接有连接架,所述连接架位于潜望镜主体的外部。
13.优选的,所述潜望镜主体的两侧均固定连接有连接轴,所述连接轴的外壁与连接架转动连接,所述连接架的一侧控制盒里面固定连接有第三电机,所述第三电机的输出端与其中一个连接轴传动连接。
14.优选的,所述升降组件包括两个安装盒,两个所述安装盒相背的一侧分别与两个固定块固定连接,两个所述安装盒之间转动连接有承载杆,所述承载杆的外壁固定套接有收线卷,所述收线卷的外壁缠绕有线缆,所述线缆的一端与安装轴固定连接,其中一个所述安装盒的里面固定连接有集电滑环。
15.优选的,其中另一个所述安装盒的里面固定连接有第一电机,所述第一电机的输出端传动连接有第一齿轮,所述承载杆的外壁固定套接有第二齿轮,所述第二齿轮与第一齿轮啮合连接。
16.本发明的技术效果和优点:
17.本发明利用升降组件、旋转组件和潜望镜主体的配合使用,在升降组件和旋转组件的作用下,潜望镜主体可以进行上下移动、水平360度旋转和仰俯旋转转动,从而使潜望镜主体可以处于特定的状态对井盖下面进行观测,另外滑块与支架是活动连接的,这样能使潜望镜主体一直保持垂直向下的姿态,做到前期检测、前期预判、前期维修,从而节省人力物力。
附图说明
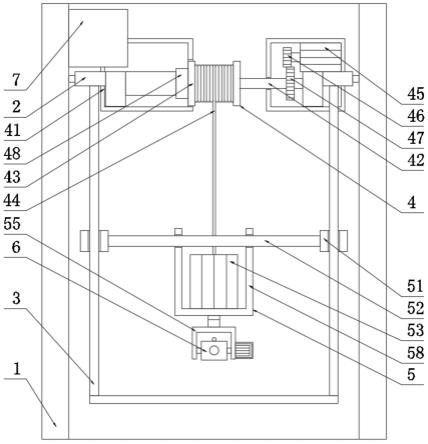
18.图1为本发明正面内部结构示意图。
19.图2为本发明连接架正面结构示意图。
20.图3为本发明流程框图。
21.图4为本发明视频处理框图。
22.图5为本发明电机控制模块框图。
23.图中:1、井壁;2、固定块;3、支撑滑杆;4、升降组件;41、安装盒;42、承载杆;43、收线卷;44、线缆;45、第一电机;46、第一齿轮;47、第二齿轮;48、集电滑环;5、旋转组件;51、滑块;52、安装轴;53、第二电机;54、传动轴;55、连接架;56、连接轴;57、第三电机;58、承载支架;6、潜望镜主体;7、控制箱体。
具体实施方式
24.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
25.本发明提供了如图1-5所示的一种固定井壁升降式潜望镜,包括:
26.井壁1,井壁1的内部设置有潜望镜主体6,潜望镜主体6工作流程控制框图如图3、图4和图5所示,潜望镜主体6用于对下水道内部情况进行监视,井壁1内壁的顶部固定连接有控制箱体7,控制箱体7的内部设置有无线传输模块和控制单片机模块,控制单片机里面有控制软件,潜望镜主体6拍摄的视频通过信号线传输到控制箱里面是视频模块,而视频模块传输给无线模块,进行存档,为管道维护保养做准备,潜望镜主体6上面有远光灯,有测距的激光,拍摄的视频传输给视频模块,视频模块由单片机软件控制,进行视频叠加,产生的视频传输给物联网模块井盖上面的物联网模块,再通过物联网传输给中央控制室,中央控制室的显示屏实时显示画面,进行存档,且控制箱体7可以通过集电滑环48、线缆44控制第一电机45、第二电机53和第三电机57通电工作,为下水道管道后期保养维护做准备,两个固定块2,固定块2转动连接于井壁1内壁的一侧,固定块2的底部固定连接有支撑滑杆3,从而在重力作用下,支撑滑杆3会处于自然垂直状态。
27.旋转组件5,其设置于潜望镜主体6和支撑滑杆3之间,旋转组件5用于带动潜望镜
主体6进行水平360度角度调节,旋转组件5包括两个滑块51,滑块51与支撑滑杆3滑动穿插套接,两个滑块51之间固定连接有安装轴52,安装轴52的外壁转动穿插套接有承载支架58,承载支架58的顶部固定连接有第二电机53,第一电机45和第三电机57的外壁均固定套接有防护安装盒,从而在第二电机53、连接架55和潜望镜主体6的作用下,承载支架58可以处于自然下垂状态,第二电机53的输出端传动连接有传动轴54,传动轴54 的底部固定连接有连接架55,连接架55位于潜望镜主体6的外部,潜望镜主体6的两侧均固定连接有连接轴56,连接轴56的外壁与连接架55转动连接,连接架55的一侧固定连接有第三电机57,第三电机57的输出端与其中一个连接轴56传动连接,第二电机53和第三电机57分别可以带动潜望镜主体6 水平旋转或倾斜旋转。
28.升降组件4,其用于带动旋转组件5和潜望镜主体6上下运动,升降组件 4包括两个安装盒41,两个安装盒41相背的一侧分别与两个固定块2固定连接,两个安装盒41之间转动连接有承载杆42,承载杆42的外壁固定套接有收线卷43,收线卷43的外壁缠绕有线缆44,线缆44具有带动旋转组件5上下运动,且也具有信号传输的功能,线缆44的一端与安装轴52固定连接,其中一个安装块41的一侧固定连接有集电滑环48,集电滑环48是传导电源与信号传输的作用,其中另一个安装块41的顶部固定连接有第一电机45,第一电机45的输出端传动连接有第一齿轮46,承载杆42的外壁固定套接有第二齿轮47,第二齿轮47与第一齿轮46啮合连接。
29.本发明工作原理:当潜望镜主体6对下水道情况进行监测时,首先第一电机45可以通过第一齿轮46和第二齿轮47带动承载杆42转动,进而承载杆42带动收线卷43转动,进而收线卷43松放或收卷线缆44,进而线缆44 的一端带动第二电机53和安装轴52下降或上升运动,进而改变潜望镜主体6 的高度,第二电机53通过传动轴54带动连接架55转动,就可以改变潜望镜主体6的水平360度旋转角度,第三电机57可以通过连接轴56带动潜望镜主体6倾斜转动,从而使潜望镜主体6处于一定的角度对下水道状态进行监测。
30.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1