一种传动装置及机器人的制作方法
本发明属于机器人,尤其涉及一种传动装置及机器人。
背景技术:
1、减速器是用于原动机和工作机之间的一种传动装置,其目的是传递扭矩和降低转速。减速器在各行各业中有着广泛的应用,是一种不可缺少的机械传动装置。减速器的种类繁多和型号各异,不同种类有不同的用途。
2、目前机器人行业一般使用四种减速器分别是rv减速器、谐波减速器、行星减速器和少齿差减速器。rv减速器和谐波减速器体积和重量过大,加工难度高且负载不高;而行星减速机的精度比较低,不适合有高精度要求的使用场景。少齿差减速机加工比较容易,在保证高负载的同时也能有较高精度。
3、现有的减速器,如公开号为cn216009399u公开的一种少齿差行星减速器结构,采用的是外齿轮上面突出的第一连接销传导动力给浮动盘上的销槽,再通过缺口把动力传给第二连接销,第二连接销带动主体转动输出动力。该专利存在两个弊端:(1)第一连接销和销槽之间的连接关系,导致转动过程中发生的是滑动摩擦,缺口和第二连接销之间的连接关系,导致转动过程中发生的也是滑动摩擦,将整个传动结构磨损大、没办法进行高速输出和效率低,而且也会在转动过程中快速发热,从而无法做到高负载;(2)第一连接销在转动过程中承受了非常大的剪切应力,非常容易造成第一连接销的折断和弯曲。
4、因而,现有的减速器存在着传动结构磨损大和负载不够高的缺陷,亟需解决。
技术实现思路
1、为了解决上述问题,本发明提供了一种传动装置及机器人。
2、本发明的技术方案在于:
3、本发明提供了一种传动装置,包括:
4、偏心轴,所述偏心轴为动力输入端;
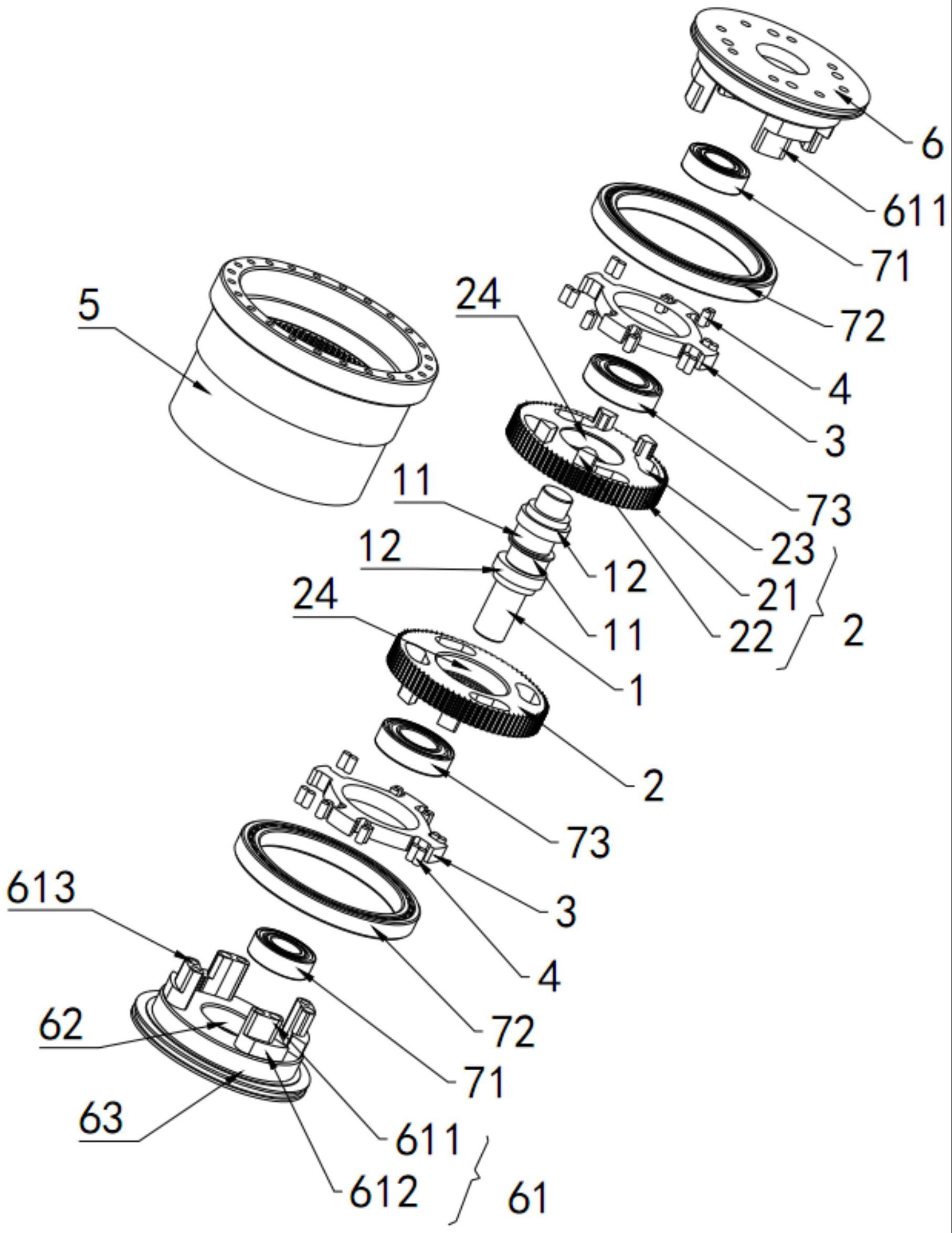
5、至少两个偏心轮,所述偏心轮均装配于偏心轴上,每个所述偏心轮上均设有外齿圈、若干固定销和若干固定孔,每个所述固定销设于每个相应的所述固定孔的侧边;
6、至少两个浮动盘,每个所述浮动盘均转动套设于偏心轴上,且与对应的偏心轮相贴;
7、若干轴销,所述轴销活动设于每个浮动盘的侧边;
8、壳体,所述壳体套设于偏心轴、偏心轮、浮动盘和若干轴销的外围,在所述壳体内壁设有内齿圈,所述内齿圈与所述外齿圈相啮合;
9、两个端盖,所述端盖为动力输出端,所述端盖装配于偏心轴上,且分别位于壳体的两端,每个所述端盖与对应的偏心轮之间设有一个浮动盘,所述端盖上设有若干连接轴,所述连接轴均穿入相对应的固定孔内。
10、进一步地,所述偏心轴上设有至少两个偏心部,相邻所述偏心部之间相错贴合,所有偏心部的相位差相加等于360°。
11、进一步地,所述浮动盘包括有圆孔和若干支角,所述圆孔位于浮动盘的中心处,所述支角沿所述圆孔的外围设置,轴销装配于所述支角的两侧。
12、进一步地,所述支角的两侧设有凹陷位,轴销设于所述凹陷位的侧边。
13、进一步地,所述连接轴包括第一凸轴和第二凸轴,所述第一凸轴穿入固定孔,所述第二凸轴位于固定销和轴销之间,且所述第二凸轴与轴销相贴。
14、进一步地,每个所述连接轴上设有若干贯穿孔和连接件,所述连接件分别穿入相对应的每个所述贯穿孔内。
15、进一步地,所述端盖上设有内圈和外圈,所述内圈位于端盖的圆心处,所述外圈位于端盖的沿边。
16、进一步地,所述内圈上设有第一轴承,所述外圈上设有第二轴承。
17、进一步地,所述偏心轮上还设有中心孔,所述中心孔上设有第三轴承。
18、本发明还提供了一种机器人,包括关节和与所述关节连接的上述传动装置。
19、本发明传动装置的有益效果在于:
20、采用多级传动方式替代轴带动方式,通过偏心轴驱动偏心轮转动,偏心轮的外齿圈与壳体的内齿圈啮合传动,偏心轮上的固定销把动力传给相贴侧的轴销,该轴销再把动力传递给浮动盘,浮动盘继续把动力传递给相贴侧的轴销,轴销再把动力传递给端盖的连接轴,从而轴销无需承受剪切应力,也不容易折断和弯曲,通过减少剪切应力,从而提高传动装置的负载;另外,由于改变了偏心轮和端盖之间的映射关系,采用了滚动摩擦替代滑动摩擦,从而提高传动装置的传动效率,也会有效的降低加工难度和运行时的精度要求,从而降低生产成本。
21、本发明一种机器人的有益效果在于:
22、采用上述传动装置于机器人的关节上,比如:肩关节和髋关节,实现机器人拟人化的运动。
技术特征:
1.一种传动装置,其特征在于,包括:
2.根据权利要求1所述的传动装置,其特征在于,所述偏心轴(1)上设有至少两个偏心部(11),相邻所述偏心部(11)之间相错贴合,所有偏心部(11)的相位差相加等于360°。
3.根据权利要求1所述的传动装置,其特征在于,所述浮动盘(3)包括有圆孔(31)和若干支角(32),所述圆孔(31)位于浮动盘(3)的中心处,所述支角(32)沿所述圆孔(31)的外围设置,轴销(4)装配于所述支角(32)的两侧。
4.根据权利要求1所述的传动装置,其特征在于,所述支角(32)的两侧设有凹陷位(321),轴销(4)设于所述凹陷位(321)的侧边。
5.根据权利要求1所述的传动装置,其特征在于,所述连接轴(61)包括第一凸轴(611)和第二凸轴(612),所述第一凸轴(611)穿入固定孔(23),所述第二凸轴(612)位于固定销(22)和轴销(4)之间,且所述第二凸轴(612)与轴销(4)相贴。
6.根据权利要求3所述的传动装置,其特征在于,每个所述连接轴(61)上设有若干贯穿孔(613)和连接件,所述连接件分别穿入相对应的每个所述贯穿孔(613)内。
7.根据权利要求1所述的传动装置,其特征在于,所述端盖(6)上设有内圈(62)和外圈(63),所述内圈(62)位于端盖(6)的圆心处,所述外圈(63)位于端盖(6)的沿边。
8.根据权利要求5所述的传动装置,其特征在于,所述内圈(62)上设有第一轴承(71),所述外圈(63)上设有第二轴承(72)。
9.根据权利要求6所述的传动装置,其特征在于,所述偏心轮(2)上还设有中心孔(24),所述中心孔(24)上设有第三轴承(73)。
10.机器人,其特征在于,包括关节和与所述关节连接的如权利要求1-9任意一项所述的传动装置。
技术总结
本发明公开了一种传动装置及机器人,通过偏心轴驱动偏心轮转动,偏心轮的外齿圈与壳体的内齿圈啮合传动,偏心轮上的固定销把动力传给相贴侧的轴销,该轴销再把动力传递给浮动盘,浮动盘继续把动力传递给相贴侧的轴销,轴销再把动力传递给端盖的连接轴,从而轴销无需承受剪切应力,也不容易折断和弯曲,提高了负载;另外,由于改变了偏心轮和端盖之间的映射关系,采用了滚动摩擦替代滑动摩擦,可以提高传动装置的传动效率,也会有效的降低加工难度和运行时的精度要求,从而降低生产成本,还可以将该传动装置应用于机器人的关节上,实现机器人拟人化的运动。
技术研发人员:张君晖
受保护的技术使用者:广州灵动方程科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!