一种管道检测机器人
1.本发明涉及一种检测机器人,具体涉及一种管道检测机器人。
背景技术:
2.在任何时期的工业中,管道作为一种实用工具有着独一无二的作用。管道在对船的运行,运送石油。利于化工产业等领域具有非常实用的应用。管道使用时会有各种缺陷难以检测。尤其是运输液体的管道,由于常年埋在地下且环境过于潮湿,经常会有大量附着物堆积在管道内壁,造成管道内壁的口径减小,更严重的会导致管道内壁的腐蚀和裂纹。由于管道通常是由内外几层所组成,内部有缺陷时,很难从外部直接看出来。但是一般运输管道又过长,很难判断具体的发生问题的位置。但目前缺少可以在内部准确判断位置,且方便操作,稳定运行的机器人来辅助人工进行检测。
技术实现要素:
3.为了解决背景技术中存在的问题,本发明所提供一种管道检测机器人。
4.本发明采用的技术方案是:
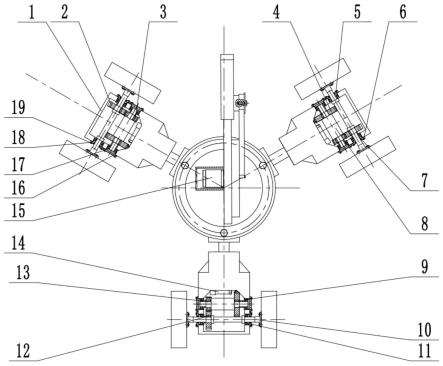
5.本发明管道检测机器人包括主壳体、机械臂机构和三个行走机构,主壳体为圆柱状结构,三个行走机构在主壳体的周面沿周向均匀间隔布置,主壳体一侧端面朝向管道检测机器人的前进方向,机械臂机构安装在朝向管道检测机器人的前进方向的主壳体的一侧端面上,机械臂机构上安装管道检测装置对管道内部进行检测。
6.所述的每个行走机构包括行走带轮、减速箱和升降装置,减速箱安装在行走带轮上,升降装置安装在减速箱内部并穿设过减速箱垂直连接至主壳体的周面,升降装置位于行走带轮和主壳体之间;行走带轮包括驱动装置、两个v带、四个v带带轮和两根减速器输出轴,每两个v带带轮的中心通过一根减速器输出轴连接,两根减速器输出轴平行布置,位于两根减速器输出轴相同一端的两个v带带轮上绕经一个v带,两个v带紧贴管道内壁面;驱动装置安装在其中一根减速器输出轴上,减速箱活动套转在两根减速器输出轴上,驱动装置位于减速箱内部。
7.所述的驱动装置包括电机ⅱ、电机齿轮、低速级大齿轮、低速级小齿轮、高速级大齿轮和减速器中间轴,电机ⅱ的机身安装在减速箱的内侧面并靠近主壳体,电机ⅱ的电机齿轮轴平行于减速器输出轴,电机ⅱ的电机齿轮轴的端部套装有电机齿轮;减速器中间轴的两端活动连接内侧面,减速器中间轴位于靠近的一根减速器输出轴和电机齿轮轴之间并平行于减速器输出轴,减速器中间轴的两端同步套装有低速级小齿轮和高速级大齿轮,高速级大齿轮和电机齿轮相互啮合;减速器输出轴在靠近低速级小齿轮的一端同步套装有低速级大齿轮,低速级大齿轮和低速级小齿轮相互啮合;升降装置安装在。
8.减速器输出轴的端部还设有轴承透盖螺栓、调整垫片、毡圈、低速级上端轴套、车轮轴承透盖、端盖螺栓、联轴器和轮子螺栓;减速器中间轴的端部还设有低速级下端轴套、高速级轴套、轴承透盖和深沟球轴承;齿轮的套装处均设有a型普通型平键。
9.所述的升降装置包括两个升降连接块、三个电机齿轮、两根升降机构传动轴、电机ⅲ和连接杆,两个升降连接块安装在减速箱的相对两内侧面,两个升降连接块上均开设有垂直于减速器输出轴和主壳体的周面的螺纹通孔,两根升降机构传动轴螺纹套装在两个螺纹通孔内,两根升降机构传动轴靠近主壳体的一端均同步套装有电机齿轮,套装在两根升降机构传动轴上的两个电机齿轮靠近主壳体的一侧齿轮面位于同一平面上,套装在两根升降机构传动轴上的两个电机齿轮不相接触,另一个电机齿轮位于套装在两根升降机构传动轴上的两个电机齿轮之间并均相互啮合,电机ⅲ位于另一个电机齿轮和主壳体之间,电机ⅲ的电机轴垂直于另一个电机齿轮的齿轮面并同步连接另一个电机齿轮的中心,电机ⅲ的机身靠近主壳体的一侧连接连接杆的一端,连接杆的另一端穿设出减速箱并垂直连接至主壳体的周面。
10.每个电机齿轮上还设有齿轮定位螺栓,每根升降机构传动轴均活动穿设过减速箱内部的箱体,每根升降机构传动轴和减速箱内部的箱体之间还设有调整垫片。
11.所述的机械臂机构包括电机ⅰ、机械臂底座、机械臂底座套环、机械臂曲柄、机械臂摇杆、机械臂手部、电机ⅳ和机械臂连杆,机械臂底座安装在朝向管道检测机器人的前进方向的主壳体的一侧端面上,机械臂底座套环布置在机械臂底座远离主壳体的一侧面上,电机ⅳ安装在主壳体内侧面并靠近机械臂底座套环,电机ⅳ的电机轴穿设过主壳体和机械臂底座同步连接机械臂底座套环的中心;机械臂曲柄垂直安装在机械臂底座套环远离机械臂底座的一侧面上,机械臂摇杆的一端活动连接机械臂曲柄的一侧面,机械臂摇杆的另一端连接机械臂手部,机械臂连杆的一端活动连接机械臂曲柄的另一侧面,机械臂连杆的另一端连接机械臂手部靠近机械臂摇杆的一侧,电机ⅰ的机身通过连接架安装在机械臂底座套环远离机械臂底座的一侧面,电机ⅰ靠近机械臂摇杆,电机ⅰ的电机轴依次穿设过机械臂摇杆、机械臂曲柄和机械臂连杆同步连接,电机ⅰ的电机轴垂直于电机ⅳ的电机轴;电机ⅰ的电机轴绕自身轴线转动带动机械臂连杆、机械臂手部和机械臂摇杆转动;机械臂手部上安装有管道检测装置。机械臂底座通过机械臂固定螺栓固定;机械臂连杆和机械臂手部之间还设有弹簧垫圈。
12.本发明的有益效果是:
13.1、本发明机器人能够顺着管道内壁按照给定的轨迹运行,并且行走机构可通过电机实现伸缩,拓宽了现有机器人在管道内部的直径变动能力,以满足不同管道直径大小需求,同时,伸缩机构可以增大机器人与管壁的压力,以此来加强与管道的贴合程度,增大运行时的摩擦力,避免机器人在管道中滑移,使其运行更加稳定。
14.2、本发明机器人的机械臂机构,对搭载在机械臂机构末端的管道检测装置进行变化角度和方位,满足不同情况的检测使用需求,在协助进行安全检测时,可以在很少或无人环境下执行管道及周围环境的检测,并进行管道内部缺陷和堵塞物的勘测和分析,保证管道的安全使用,同时也使其具有一定的创新型变径机构来保护自身机体的安全从而加强检测的效率,提高了管道检测机器人的泛用性、实用性,且满足工业生产上的需求。
15.3、本发明机器人的机械臂机构的设计同时可以实现不同管道清理等功能,克服了机器人在管道中卡住等缺点。
36和连接杆,两个升降连接块安装在减速箱1的相对两内侧面,两个升降连接块上均开设有垂直于减速器输出轴10和主壳体23的周面的螺纹通孔,两根升降机构传动轴25螺纹套装在两个螺纹通孔内,两根升降机构传动轴25靠近主壳体23的一端均同步套装有电机齿轮22,套装在两根升降机构传动轴25上的两个电机齿轮22靠近主壳体23的一侧齿轮面位于同一平面上,套装在两根升降机构传动轴25上的两个电机齿轮22不相接触,另一个电机齿轮22位于套装在两根升降机构传动轴25上的两个电机齿轮22之间并均相互啮合,电机ⅲ36位于另一个电机齿轮22和主壳体23之间,电机ⅲ36的电机轴垂直于另一个电机齿轮22的齿轮面并同步连接另一个电机齿轮22的中心,电机ⅲ36的机身靠近主壳体23的一侧连接连接杆的一端,连接杆的另一端穿设出减速箱1并垂直连接至主壳体23的周面。
26.每个电机齿轮22上还设有齿轮定位螺栓21,每根升降机构传动轴25均活动穿设过减速箱1内部的箱体,每根升降机构传动轴25和减速箱1内部的箱体之间还设有调整垫片24。
27.机械臂机构包括电机ⅰ15、机械臂底座20、机械臂底座套环27、机械臂曲柄28、机械臂摇杆29、机械臂手部31、电机ⅳ37和机械臂连杆,机械臂底座20安装在朝向管道检测机器人的前进方向的主壳体23的一侧端面上,机械臂底座套环27布置在机械臂底座20远离主壳体23的一侧面上,电机ⅳ37安装在主壳体23内侧面并靠近机械臂底座套环27,电机ⅳ37的电机轴穿设过主壳体23和机械臂底座20同步连接机械臂底座套环27的中心;机械臂曲柄28垂直安装在机械臂底座套环27远离机械臂底座20的一侧面上,机械臂摇杆29的一端活动连接机械臂曲柄28的一侧面,机械臂摇杆29的另一端连接机械臂手部31,机械臂连杆的一端活动连接机械臂曲柄28的另一侧面,机械臂连杆的另一端连接机械臂手部31靠近机械臂摇杆29的一侧,电机ⅰ15的机身通过连接架安装在机械臂底座套环27远离机械臂底座20的一侧面,电机ⅰ15靠近机械臂摇杆29,电机ⅰ15的电机轴依次穿设过机械臂摇杆29、机械臂曲柄28和机械臂连杆同步连接,电机ⅰ15的电机轴垂直于电机ⅳ37的电机轴;电机ⅰ15的电机轴绕自身轴线转动带动机械臂连杆、机械臂手部31和机械臂摇杆29转动;机械臂手部31上安装有管道检测装置。机械臂底座20通过机械臂固定螺栓26固定;机械臂连杆和机械臂手部31之间还设有弹簧垫圈30。
28.本发明的具体实施及工作过程如下:
29.当管道检测机器人开始行走时,三个行走机构的电机ⅱ依次带动各个齿轮和轴转动,进而带动各个v带带轮33转动,使得各个v带32转动带动管道检测机器人在管道内壁面移动,带动管道机器人沿管道方向移动进行检测;在管道内径发生变化时,通过升降机构的电机ⅲ36带动各个齿轮转动,进而带动各个升降机构传动轴25在螺纹通孔中移动,进而通过各个连接杆带动各个行走机构靠近或远离主壳体23,使得各个v带32紧贴抵紧管道的内壁面;管道检测机器人在行走的同时进行检测,通过电机ⅲ36带动机械臂底座套环27转动,通过电机ⅳ37带动机械臂手部31转动,使得机械臂手部31末端携带的管道检测装置可以对管道进行故障检测;同时电机ⅲ36和电机ⅳ37可以控制机械臂手部31对管道检测机器人前方的堵塞处进行清理,避免机器人在管道中卡住等。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1